基于小型无人船的海洋养殖环境监测系统设计
2018-07-11刘培学刘纪新姜宝华陈玉杰
刘培学,刘纪新,姜宝华,陈玉杰
(青岛黄海学院机电工程学院,山东 青岛 266427)
溶氧(DO)、pH、氨氮、温度等参数对海水养殖鱼类、贝类生长具有至关重要的作用[1-3]。近年来,海参、鲍鱼等海洋养殖产业逐渐规模化和集约化。为了追求经济效益,养殖密度不断加大,导致了海洋养殖水质环境的恶化,影响到了养殖生物的生长发育,病害时有发生,养殖户经济效益受损,且养殖区域需人员长期驻守,浪费大量人力、物力、财力[4-6]。基于此,海洋养殖自动化监控系统的研究逐渐兴起。随着传感器技术及嵌入式系统技术的发展,对海洋养殖环境参数如pH、温度、溶氧等进行自动化监控提供了可能。目前,海水养殖自动监控系统自动化程度较低,存在着有线检测布线复杂、监测点不易移动、数据传输速率慢、客户端/服务器(C/S)架构设备价值较高以及采集点过于单一等问题[7-10]。研究适合大规模养殖、能够进行移动监测以及数据可远程查看的海水养殖监控系统具有重要的实际意义[11]。
本研究基于小型无人船结合长距离无线通信(Lora)、第4代移动通信(4G)传输模块,设计了一种移动浏览器/服务器(B/S)架构的海洋养殖监测系统,该系统能够自动巡检养殖区域内水质参数,并将采集的数据储存到云端,终端用户通过浏览器就可以查询观测养殖场的监测数据,方便易用,且动态采集多点信息,使监控更加精细化。
1 系统架构
系统整体架构如图1所示,分为采集终端、云端和客户端三部分。采集终端为携带有传感器及信号传输设备的小型无人船,云端包含带数据库的服务器,客户端为岸基电脑(PC机)或用户手机。

图1 系统整体结构图
首先,云平台或客户端给出采集点坐标,无人船根据给出的采集点信息,自动规划路径,按照规划的路径形式,依次采集各个采集点的信息,包含pH、温度、溶氧等。采集完成后,无人船通过4G网络上传至云平台,云平台完成信息的接收及存储,同时向无人船发送确认信息,通过握手确保传输信息的可靠性。若4G网络不存在,无人船通过Lora无线通信方式将信息传至现场PC机;若存在Internet网路,可通过安装在PC机的软件将信息上传至云平台。同时,客户端PC机或手机可通过数据网络浏览采集数据,接收报警信息等。
2 硬件设计
海洋养殖环境采集的信息一般有温度、pH、溶氧等,主要完成指定区域的海水参数采集。整个监测系统的硬件部分主要安装在无人船上,分为传感部分及通信部分。
2.1 传感器设计
传感器设计如图2所示,整个传感器系统由控制器、pH传感器、溶氧传感器、温度传感器、时钟模块构成。
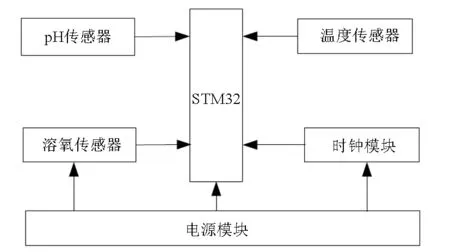
图2 传感器系统结构体
无人船的控制核心为STM32 F103ZET6微控制器,该微控制器是由瑞士ST(意法半导体)公司研发的STM32系列中的一种32位处理器,具有256 K的程序存储器和64 kB的数据存储器,完全能够满足本设计需要[12-14]。温度传感器选用防水性数字温度传感器18B20,该传感器采用一线制通信,提供数字温度信号,除供电引脚外,只需将数据引脚DQ连接到控制器的任一I/O口[15]。pH传感器采用pH复合电极E-201-C,该传感器采用5 V电压,工作电流范围为5~10 mA,pH检测范围为0~14,该传感器工作温度范围为-10 ℃~+50 ℃,其输出为模拟电压量,具有良好的线性,因此其输出需接到STM32本身自带AD,采集的结果用公式(1)计算,X为采集的模拟电压值,Y为输出pH[16]。
Y=-5.964 7X+22.255
(1)
溶氧传感器采用LDO工业在线荧光溶氧传感器,该传感器采用荧光检测技术,通过检测荧光强度和寿命来检测溶氧值,较之传统的电化学传感器,该传感器在测试过程中不消耗氧气,没有搅拌和控制流速过程,不需要电解质溶液,也不需要标定,使用方便[17-18]。该传感器防护等级可达IP68,工作电压为宽电压5~16 V,输出信号为4~20 MA电流信号或0~5 V电压信号,分辨力为0.01 mg/L。本设计中采用0~5 V电压信号,信号输出接入STM32自身携带AD转换电路。
2.2 通信电路设计
本设计有两种通信方式,一种为无人船通过4G网络信号将信息传至云平台,另一种为4G信号不存在时,通过Lora将信息传至本地监控PC,因此,无人船携带的通信设备有2种。通信系统设计如图3所示,整个通信系统由控制器、4G模块及Lora模块构成。
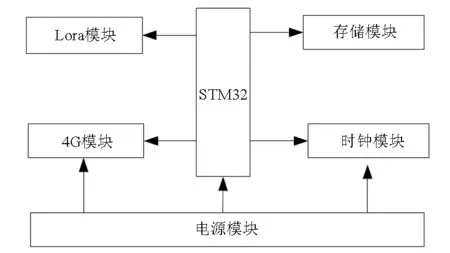
图3 通信系统结构图
4G模块负责信息的远程传输,设计中采用了USR-LTE-7S4模块,该模块支持5模12频移动联通电信4G高速接入,嵌入式Linux系统开发,具有高度的可靠性, 支持RNDIS远程网络驱动接口,电脑可以通过USB连接该设备访问互联网,允许4个网络连接同时在线,支持TCP和UDP,每路连接可缓存10 kB串口数据,支持宽电压范围(5~16 V),带SIM卡槽,支持串口AT指令[19]。该设备连接到STM32控制器的第一串口。Lora模块采用USR-L100-C模块,该模块工作频率为398~525 MHz,典型值为470 MHz,传输距离可达4 700 m,工作电压1.8 ~3.6 V,可通过AMS1117输出需要的电压,该模块与STM32嵌入式控制器通过串口进行通信,连接至控制器的第二串口[20]。
3 软件设计
本系统采用4G技术、Lora技术,基于小型无人船采集pH、温度、溶氧信息,软件部分主要为无人船的巡航路径规划及信息的远程传输。
3.1 无人船路径规划
无人船船体较小,采用电池为动力,而海洋养殖面需要采集多点参数,采集点位置通过上位机或者云平台给出,节能体现在以最短的路径将所有检测点遍历完毕,因此,选择合适的遍历路径就显得尤为重要。路径规划对无人船检测海洋养殖环境具有重要意义,对进一步监测海水环境有着重要的理论价值,小型无人船的路径规划是本文讨论的重点。
本设计中,无人船的工作路径规划采用遗传算法[21-22],无人船的工作环境为海表面,根据海洋养殖环境的特点,建立二维笛卡尔坐标系(x,y)下离散栅格空间。Δx、Δy分别为x、y轴方向栅格的大小。栅格中任一点q可定义为:
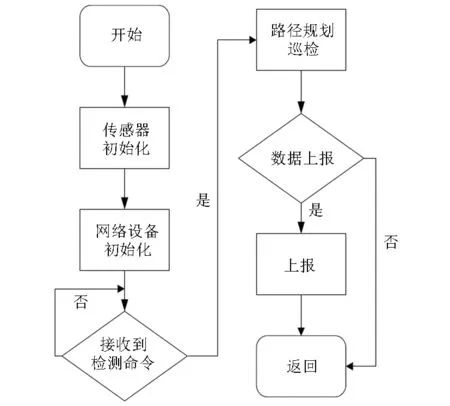
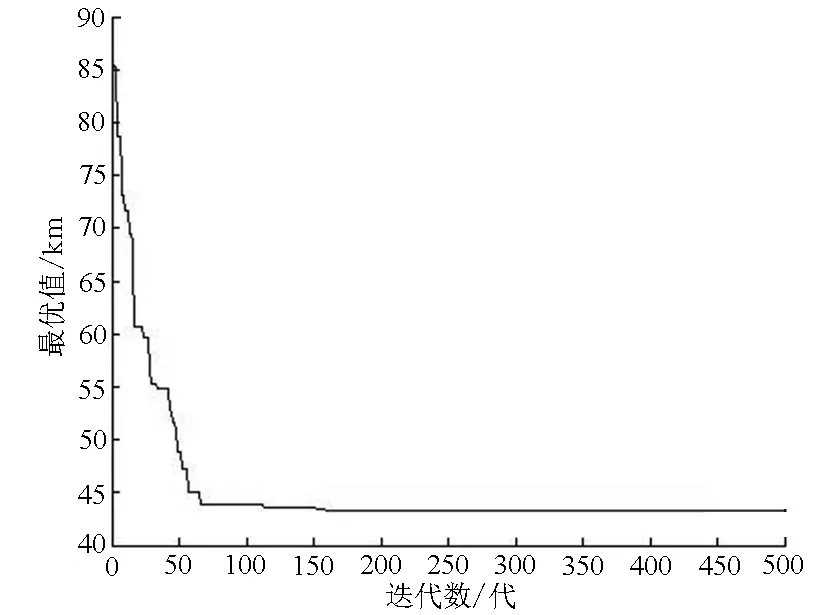
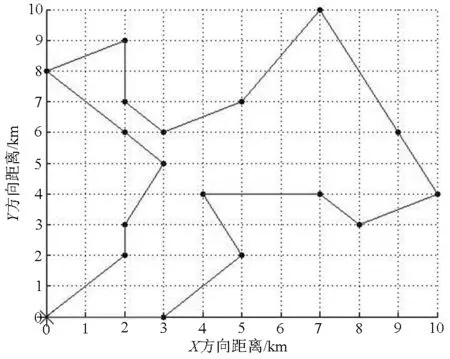
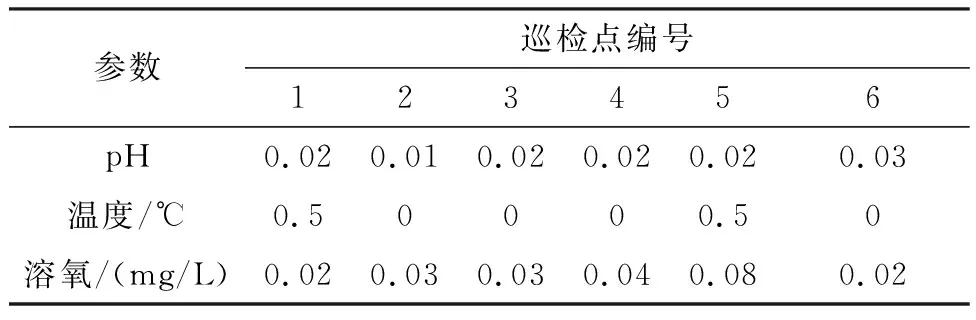
q=q(i,j),0≤i (2) 式中:m、n—分别为x、y轴方向的最大栅格个数。 将二维平面空间进行栅格化处理,每个栅格为边长1 km的正方形,任意一个采集点i的坐标为(xi,yi),则问题转化为计算从海洋养殖无人船停靠点出发,经过所有采集点,采集信息后回到停靠点的最短路径。本文通过定义一个距离来表示两者之间的实际距离,距离的定义主要考虑了两个区域之间的直线距离,距离定义为 (3) 式中:L—两点之间的距离;xi、yi—采集点i的坐标;xj、yj—采集点j的坐标。 对每个个体路径评估,采用路径距离作为适应度,即将每条路线先后经过的检测点的距离计算出来,并进行累加,作为该条路径的适应度函数。二维平面中,假设任意一个个体的第i段路径是由节点(xi-1,yi-1)、(xi,yi)连接而成,计算出它的长度为di,累加值越小的个体能量消耗越小,适应度越强,表示的路径越优[23-24]。 (4) 式中:di—第i段路径距离,E—路线总距离。 巡航路径规划如下: ①无人船等待上位机或岸基PC机的巡检坐标,将巡检坐标以数组形式存储。 ②种群初始化,种群中的个体是随机产生的,每一个个体对应一个备选的路径。个体的产生为每个采集点经过的顺序。针对海洋养殖无人船路径优化问题的特点,采用十进制编码方案,使用各个需求点的节点编号作为基因来组成染色体,每一条染色体的编码为巡检点出现先后顺序。例如对于染色体X[1,6,3,4,5,2,7 ,8,20 ,9,…,16]。则无人船从原点出发,先经过第一个检测点,再到第6个检测点,最后达到第16检测点,然后回到原点,同时计算适应度。 ③选择算子,选择优质个体,淘汰部分适应度差的个体的过程,此过程通常也被称作复制或繁殖,本研究采用轮盘赌选择。 ④交叉算子,指将两个相互配对的父代染色体按照某种方式相互交换其部分基因,生成两个新的子代染色体的操作。为了保持种群的多样性,本研究采用部分交叉方案,染色体具有不能重复及不能漏检的特殊性,当交叉算子应用于父代个体X1 和X2 时,首先从父代个体X1 和 X2 中随机选择交换区间I到J,然后将X1中 I后面J前面的基因和X2中对应位置的基因逐位交叉,由于该路径所有点必须都经过,为避免出现漏点及重复点,交换后必须将原染色体中跟交换进来的元素相等的位置变为交换出去的数据,交换完成形成两个新的染色体,最后检测染色体合法性,若染色体不合法转到步骤③,合法转步骤⑤。 ⑤变异算子,依照变异概率,随机选取染色体任意两个位置,进行互换操作,这样做的好处是保证了染色体的合法性。 ⑥判断迭代次数是否达到设定值,若未达到,转步骤①,若达到,开始巡检。 路径规划流程如图4所示。 图4 路径规划流程图 无人船主程序流程图如图5所示。 图5 无人船主程序流程图 系统通电后,首先进行传感器的初始化,传感器的初始化主要为AD转换电路的初始化,用于取得各信息采集点的pH、温度、溶氧等参数,随后进行网络设备的初始化。网络设备的初始化主要为串口通信波特率的设定等,判断有无4G网络信号,然后等待上位机发来的巡检命令,当无人船接收到巡检命令时,按照上述算法进行路径规划,随后按照规划路径进行巡检,同时将采集信息显示在无人船自身携带的液晶屏上,巡检结束后,根据设定将数据主动上传至云平台或等待上位机命令上传。本系统的云平台采用公用云平台TLINK,PC机软件采用VB6.0设计。 路径规划测试采用仿真进行,仿真实验中设置养殖空间二维栅格大小为1 km×1 km,巡检点随机生成20个,遗传算法初始化种群选用个体100个,交叉概率为0.9,变异概率为0.4,无人船起点与终点坐标为a(0,0),迭代次数500代。优化过程如图6所示。 图6 优化过程图 从图6中可以看出,在约150次迭代后,最优值逐渐趋于稳定,最优路径规划如图7所示,其中,由圆点连接的路径为规划的路径,其行驶总距离大于40 km,较之优化开始时随机生成的路径最优值大于80 km,较大地提高了效率。 图7 规划路径图 在某海参养殖场搭建测试系统采集参数,标准检测对比器具采用NOBOTECH智能水质检测仪,数据采集误差结果如表1所示,可以看出,设计的系统测量值与实际值误差较小,具有较高的一致性。温度误差较小,最高偏差为0.5 ℃,pH、溶氧与标准值误差也相对集中,可采用软件修正方式进行修正。 表1 数据测量误差 基于4G、Lora技术、遗传算法,设计了一种海洋养殖环境监测小型无人船,该系统实现了海洋养殖环境的无人自主巡检,配合云服务器及PC端软件,可实现采集信息的远传远控,无需复杂布线且无人船能够自主规划路径,提高了监测效率。同时,该系统采用的技术可以为其他养殖行业提供参考,方便易用,具有一定的应用前景及经济效益。 □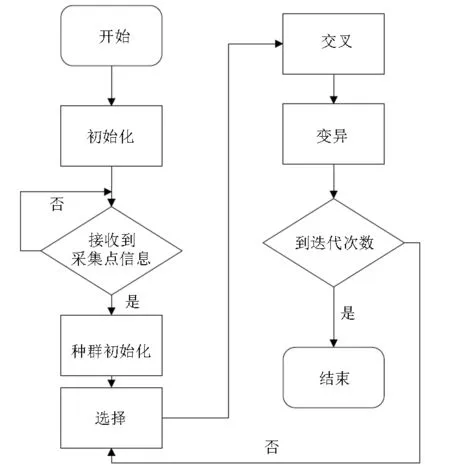
3.2 无人船主程序
4 系统测试
4.1 路径规划测试
4.2 数据传输测试
5 结论
