单相UPS主逆变电路控制策略研究
2018-07-06陈瑞霞
陈瑞霞
(山西省晋煤集团通信分公司成庄站, 山西 晋城 048021)
引言
社会进入了互联网时代,特别是在国家提出建设“中国制造2025”之后,对电能的需求日益增加,对供电的质量、安全等各方面也都提出了新的更高的要求,在民用行业,比如银行、医疗、证券等领域,在煤炭等工业生产领域,特别是通信领域,一旦发生供电故障造成通信网络中断,将有可能引发后续灾难,造成不可挽回的经济和社会损失,因此本文就单相UPS正弦逆变电路控制策略进行深入分析研究,以从根本上保证通信电源的安全可靠[1]。
1 UPS主逆变电路
UPS电源系统的基本构成主要包括主电路拓扑结构、主控单元、监测电路、保护电路等。本文将针对主电路拓扑结构的控制策略进行研究,图1为传统在线式双边UPS拓扑,是UPS的功率组成部分。其由市电输入整流桥B1、逆变器、输出变压器、限流电阻、输出滤波电容等组成。逆变器和输出滤波电容、输出变压器是逆变电路中的主要控制对象。
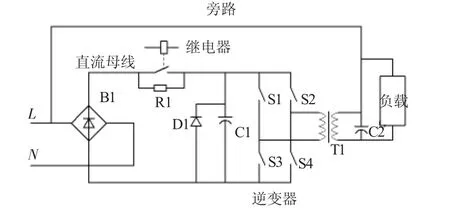
图1 UPS主电路拓扑结构
2 单相USP正弦逆变器数学模型及分析
图2是单相UPS主电路拓扑结构的正弦逆变器等效图的正弦逆变系统模型[1]。

图2 UPS逆变系统模型
图2 中的E为直流母线电压,电感L和电容C构成了一个滤波器,它的作用是滤除脉宽调制波中的高次谐波,这些是UPS逆变系统的控制目标。图2中的右半部分所示的晶闸管斩波电路和全桥整流电路用于衡量UPS的性能。
根据前面确定的控制对象,将电容C两端的电压VC和流过电感L的电流iL作为变量,列出如下方程:

其中:

为了便于分析,将系统的输入电压等效为SPMW波的平均电压,这样可以将连续系统离散化为:

其中:
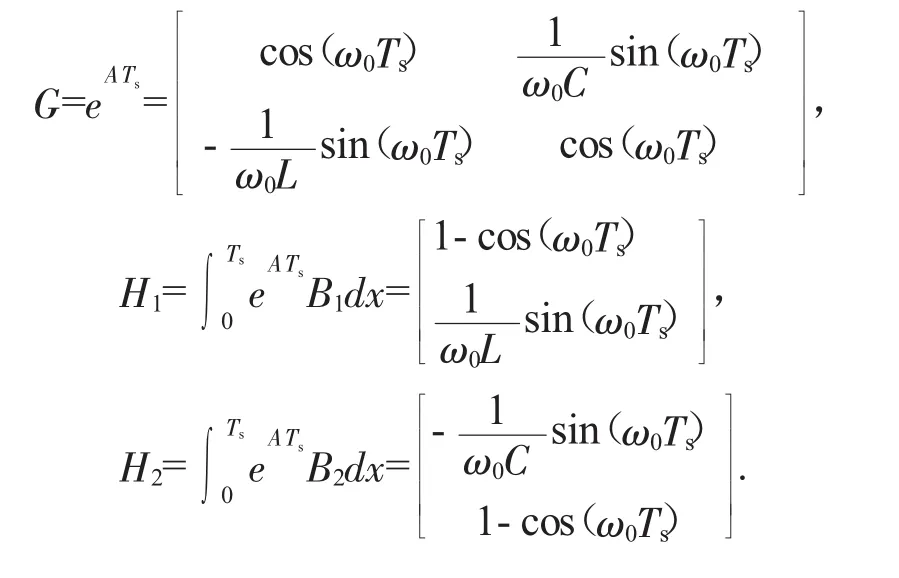
在研究过程中,将采样频率f=1/Ts作为谐振频率的设计值,使得 ω0·Ts<<1,上式可以进一步简化为:
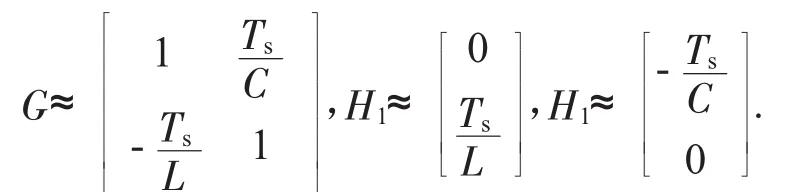
通过上述简化后,可将UPS逆变器等效为图3所示,单相UPS正弦逆变器被等效为如图3所示的数学模型。
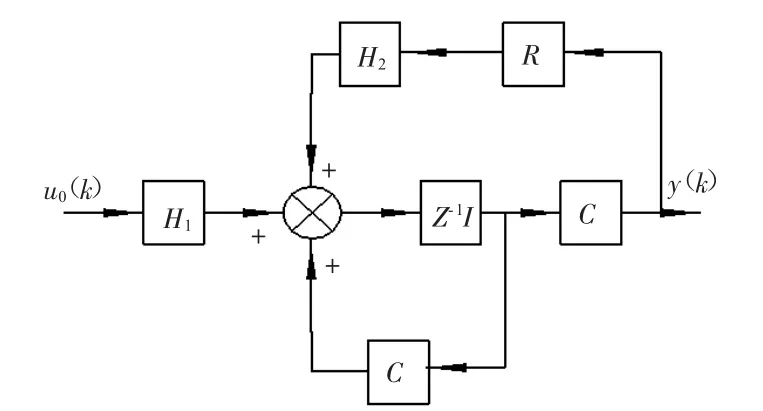
图3 逆变器数字模型方框图
3 控制策略研究
传统的UPS电源采用的PID控制是通过采集输出电压作为系统的反馈信号,利用设计好的固定模式对整个系统进行调节,其动态性能差,随着DSP芯片的出现,使这个问题得到较好的改善。本文将PID理论应用于UPS的控制[3]。
连续时域PID控制器方程如下:

可以将上述方程离散化为:

在运行过程中,非线性的周期性负载会有输出误差,为了降低这种误差,本文采取如下方法提高控制性能,如图4所示。

图4 控制原理图
通过增加重复控制器,可以减小非线性等因素带来的误差,从而增加系统的相应精度。这种策略的本质上是误差积分器,通过对输出的误差进行不断的累计,并将其累计得出的误差结果向系统中反馈,从而消除误差。
重复控制器的方程如下:

式中:e(k)表示系统输出误差,C为重复控制器增益,N为时间超前步数,n为采样数。
通过分析方程可以得出,C是重复控制系统的关键参数,其值的选取直接影响系统的响应、乃至整个系统的稳定性。如果C的值较大,则反馈给系统的信号也就较大,系统的误差回落就较快,但是其弊端是,会造成整个系统的稳定性下降。
通过对带重复控制器的PID系统方程的分析计算,可得:

当整个控制系统具有良好的响应极点时,我们可以确定PID控制器的K1、K2,从而使得控制系统对阻性负载的相应特性得到优化控制。
4 控制器的设计与仿真
4.1 控制器的设计原理与设计过程
将UPS的逆变电源等价为正弦波随动系统,为控制系统设计双环控制。根据数学模型的分析,将负载电流作为系统的扰动因素,内环的作用即消除扰动,利用数字误差拍的原理,实现输出对输入的跟随,使控制系统的输出保持稳定,从而降低输出畸变,提高动态响应特性。外环为一个积分器,其作用是减小静态误差,提高静态响应特性。其结构原理图如图5所示[4]。
由图5可知,内环由状态反馈组成,外环由误差积分器配合输出的反馈信号组成,且结构简单,效果明显。其系统方程如式5所示。

图5 单相UPS逆变器控制原理图

于是:

因此,整个系统的状态方程和解如下:

对于阶跃输入,r(k)=r,当 k=+∞,x(k)、y(k)、i0(k)趋于常数,因此,
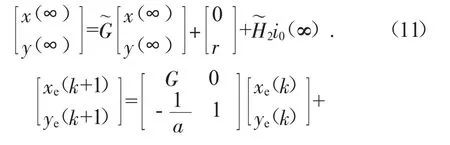

定义:
则式(9)可转化为:

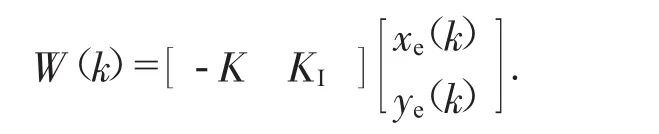
式中,

式(13)和(14)为标准的状态空间方程式,此系统包括自身状态反馈和负载误差两个输入,其中负载误差为系统的干扰因素。矩阵K^可以通过极点配置,使干扰误差减小为0而求解,进而求解K,和KI。
4.2 仿真
本文采用美国mathworks的MATLAB软件对系统进行仿真。MATLAB6.5环境下的动态仿真工具simulink软件包在建模、仿真、分析等方面应用非常广泛,其界面采取交互式设计,直观形象,对于仿真过程中的参数修改、结果观察都非常方便。参数如下:滤波电感L=1.8mH、滤波电容C=120uF、增益E=311V、参考正弦波r=1 V、f=50 Hz、采样频率10 kHz。
4.3 控制器校正后的系统阶跃响应
经控制器校正后,正弦变系统的极点被配置在零点处。通过观察可以发现,系统的输出对参考输入的跟随性有了明显的改善。在校正前,输出的调节时间和超调量都明显过大,如果系统的负载发生变化时,系统的输出性能也会发生类似的变化。因此,采用基于PID控制的控制器,去除负载的干扰影响,对UPS的运行非常重要。
对比图6中的阶跃响应图,校正前系统的调整时间为1.2 ms,校正后降低为0.6 ms,而且没有出现响应超调,说明控制效果良好,系统的动态性能得到了较为明显的提高。

图6 单位阶跃响应图
5 结论
经过理论分析和仿真实验的结果可以看出,采用基于PID控制理论的正弦UPS逆变电源,在抑制负载对UPS逆变器的负面干扰方面有着较为明显的改进作用,而且能够提高整个系统的动态性能和控制精度。该控制策略及系统结构简单易行,通过对UPS正弦逆变系统进行仿真,验证了其可行性和控制效果。
[1]刘豹.现代控制理论:第2版[M].北京:机械工业出版计,1992.
[2]冯国楠.现代伺服系统的分析与设计[M].北京:机械工业出版社,1990.
[3]魏克新,王云亮,陈志敏.MATLAB语言与自动控制系统设计[M].北京:机械工业出版社,1997.
[4]薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用[M].北京:清华大学出版社,2002.
