基于PLC的煤矿架空乘人装置控制系统研究
2018-07-06薄炜杰
薄炜杰
(西山煤电(集团)有限责任公司, 山西 太原 030053)
引言
随着科学技术的不断发展,自动化技术日趋成熟,利用可编程控制器(PLC)为核心,开发出一套架空乘人装置自动化控制系统。该系统的核心硬件为欧姆龙公司生产的CQM1H型可编程控制器采用Ver2012043CP1H软件进行编程,优化保护系统,最终可以实现自动化控制架空乘人装置。
1 硬件组成
1.1 系统整体结构
架空乘人装置自动化控制系统主要包括PLC控制柜[1]、操作箱和分站箱组成。分站箱一共3个。其中,PLC控制柜和操作箱在机头部位,控制柜可以发出相关的控制信号和执行信号,在操作箱上安装触摸屏,可以实时的显示架空乘人装置的运转情况,操作箱还设有启动、复位、急停等功能的按钮。分站箱1和分站箱2按顺序布置在巷道,分站箱3放在架空乘人装置机尾处。使用PROFIBUS Decentralized Periphery通信方式将机头主站和分站连接[2]。机尾处的接入启停、拉线、拖绳、越位和重锤保护等功能[3]。利用光电交换机将分站箱与地面计算机相连,最后实现远程控制。架空乘人装置自动化控制系统结构如图1所示。
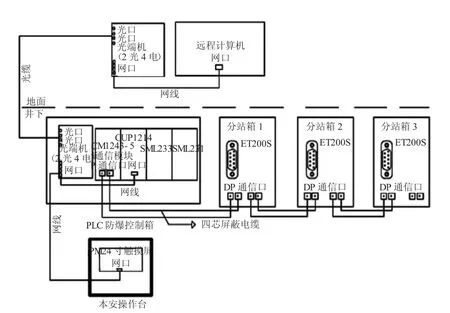
图1 自动化控制系统整体结构
1.2 PLC设计
CQM1H可编程控制器的硬件组成包括1个BT 2103-5PROFIBUSDecentralized Periphery通信模块、1个CPU2428GT/GT/GT模块、1个SM2125模拟信号输入模块、1个SM2177数字信号输入/输出模块、3分站箱的型号为AM600B,各分站还包括1个TF232-2COMPACT64模 块 、1个 4IM×24VOC/0.8MT和1个BM-D252AD终端模块组成[4]。
CQM1H CPU具有28点输入/20点输出,所分配的物理地址 QBI、IBI、IBO、QBO。其中输入点负责的信号包括:操作箱控制信号、机头越位、驱动速度、脱绳轮速度等,输出点负责的信号包括:制动闸控制、电动机控制、驱动轮控制等。SM2125(AI6×32bit)模块端点负责接收驱动油压信号、补油压信号、油温信号等。SM2125(DN32×24V)模块负责连接工作人员上下信号和架空乘人装置甩道信号[5]。分站AM600B的端点(DN32×24V)负责接收拉线和机尾的信号。
2 系统软件及功能
2.1 软件流程
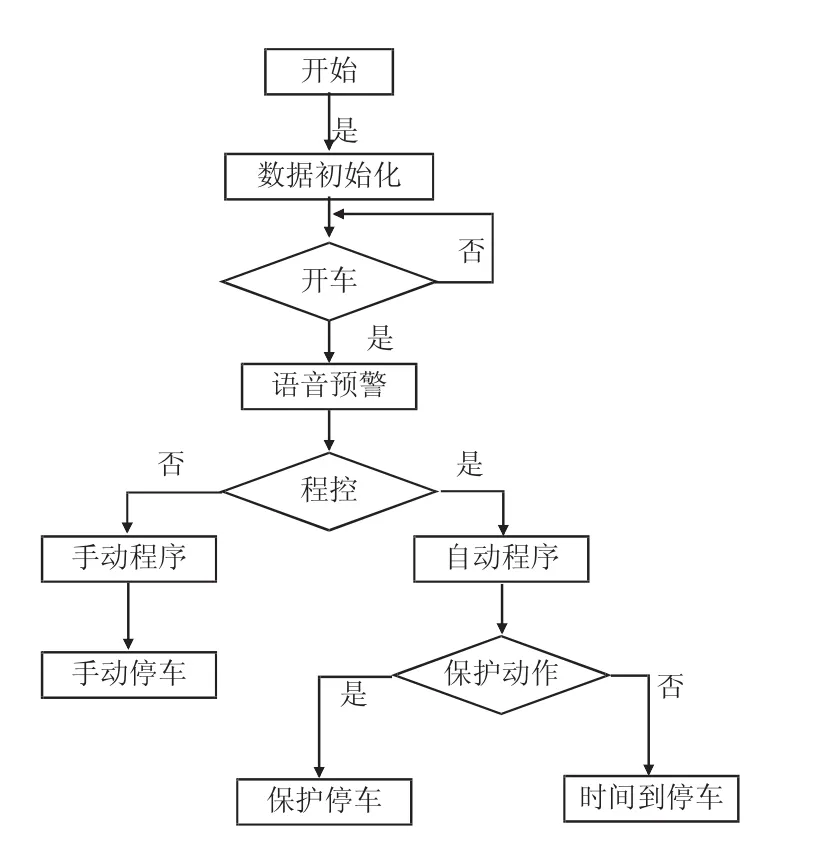
选择Ver2012043CP1H进行硬件的编程[6]。程序编写完成后,组态出和主站、分站相匹配的硬件,然后进行PROFIBUS Decentralized Periphery通信连接。采用模块化思维进行程序设计,主要包括:主程序、启动模块、初始模块、速度控制模块、数据传输模块、停止模块,流程如下页图2所示。
2.2 主要功能及原理
设计架空乘人装置控制系统的目的是为了实现人员安全运输及设备保护。
通过在设备的相关部位安装传感器,对设备运行过程中的主要参数进行监测,并设定正常工作时的参数范围。如果传感器监测的数据不在正常范围内,就会发出相应警报,提醒工作人员处理。设备保护的主要监测参数包括:油压压力、电机温度,人员保护的主要监测参数包括设备运转速度、钢丝绳工作状态、有无拖绳风险等。
1)油压压力、电机温度监测。电动机是整个装置的核心部位,通过对电动机内油的压力及电动机温度进行监测,判断电机的工作状态。为了确保制动闸和钳形闸可以正常工作,还需要对液压站的油压进行监测,监测主要包括补油油压、驱动油压和泵控油压。此项监测可以杜绝因为机械原因造成的钳形闸和制动闸无法工作。
2)速度保护、拖绳保护。架空乘人装置在运转过程中的基本要求就是速度稳定,测量速度的传感器型号为SCA1000-D01,通过分析单位时间内所测得的脉冲信号数量,判断其速度情况。传感器的安装位置在机头附近,同时在拖绳靠近内轮处安设磁钢,当架空乘人装置开始工作之后,磁钢有利于保证装置速度稳定。如果传感器监测到的脉冲信号数量出现异常,变会发出报警信号,自动停止设备运行。
因为钢丝绳拉紧之后,会产生横向作用力,在机头、机尾及边坡点,容易出现脱绳的现象,在边坡点安装SCA1000-D01传感器。当设备正常运行时,会产生正常的脉冲信号,如果边坡点处钢丝绳发生脱落,所在位置的轮子就会停止运转,传感器将无法接收到脉冲信号,便可以报警,实现拖绳保护。
3)越位保护、拉线保护、重锤保护。某煤矿架空乘人装置采用的是无极循环钢丝绳带动座椅,使得工作人员通过驱动盘时可能会在离心力的作用下被甩下装置,为此要安装越位保护设备。越位信号的开关接入控制回路,正常情况下,越位开关不会产生动作,当有人出现越位时,在重力的作用下,越位开关发生动作,实现自动停车、并对故障进行语音播报。
当架空乘人装置在运转的过程中,随着使用时间的增加,钢丝绳可能会出现松垮、断绳等现象。为此专门设计了重锤保护。重锤装置通过轨道小车和机尾的摩擦轮相接,在装置的上下方适当位置设有开关,在运转过程中,如果出现了钢丝绳断裂等故障,小车将沿轨道向下移动,出发到开关,实现对架空乘人装置的重锤保护。
沿着装置的方向设置拉停开关,正常条件下,信号处于常开状态,当工作人员发现紧急情况时,拉动开关,即可实现紧急停车。在机头处设有复位按钮,当情况排除后,摁下复位按钮,即可使设备重新运转。
3 现场试验
将该系统在某煤矿进行了现场试验。该煤矿架空乘人装置型号为RJKY55-25/600,巷道全长820 m,最大倾角为35°,平均角度为22°,正常运行速度为0.9 m/s,乘人间距为12 m,人员运输效率为360人/h,牵引力为16085 N,钢丝绳最大张力为40033 N,尾锤重量为900 kg,驱动轮尾轮直径为1100 mm,钢丝绳规格为 12.5-NAT-6×29Fi+IWR-1770-ZS-GB8919。
使用架空乘人装置控制系统后,某煤矿架空乘人装置的管理效率有了明显提升,可以时刻了解电机及其他设备的工作状态,大大降低了设备的故障率,取得了理想得效果,在进行井下试验的过程中,架空乘人装置出现了一次超速情况,监测传感器及时报警,并自动停止了设备的运转,从根本上降低了安全隐患。
4 结语
在架空乘人装置控制系统应用过程中,发现此系统具有操作简单、监测准确等优点,可实现架空乘人装置的平稳启动、停止,增加了架空乘人装置运行的安全性,对其他矿井架空乘人装置的的应用与管理具有借鉴意义。
[1]肖公平,罗前发.PLC可编程控制器在架空乘人装置自动化控制的应用[J].煤矿开采,2009,14(5):2-73.
[2]张秀良,李建忠,王辉.狭窄井巷架空索道人料运输系统设计与应用[J].煤矿机械 2010,31(4):177-179.
[3]刘璐,朱一凡.基于PLC与组态王的带式输送机控制系统设计[J].煤矿机械,2010,31(6):20-22.
[4]丁砚涛,姜昆,徐安成.井下架空乘人装置的问题分析与措施研究[J].山东煤炭科技,2004(2):94-95.
[5]白云,高育鹏,胡小江,等.基于Lab VIEW的数据采集与处理技术[M].西安:西安电子科技大学出版社,2009.
[6]王志奎,朱清慧.可编程控制器和交流变频器在开环、闭环调速系统中的应用[J].现代电子技术,2002(7):27-29.
