基于微型无人机遥感数据的城市水环境信息提取初探
2018-07-06李旭文牛志春李卫正王甜甜
侍 昊,李旭文,牛志春,李卫正,王甜甜,张 悦
1.江苏省环境监测中心,江苏 南京 210036 2.南京林业大学现代分析测试中心,江苏 南京 210037
近几十年,中国城镇化和工业化进程的发展速度不断加快,但城市基础设施建设不足,使一些城市水体直接成为工业、农业及生活废水的主要排放通道和场所,导致部分水体大面积污染,引起水体富营养化,形成黑臭。城市水体黑臭不仅给群众带来了极差的感官体验,也直接影响群众的生产生活。鉴于此,黑臭水体整治已经成为各级人民政府改善城市人居环境的重要内容。2015年4月,国务院颁布的《水污染防治行动计划》中提出“加大黑臭水体治理力度,到2020年底前完成黑臭水体治理目标”[1]。针对黑臭水体一般为令人不悦的水色,在遥感影像上常表现出与正常水体不同的光谱反射曲线特点,住房城乡建设部、环境保护部引入卫星遥感技术加强对城市黑臭水体整治工作的监督,并将信息实时反馈到“全国城市黑臭水体整治监管平台”。目前,依靠卫星遥感对全国295个地级及以上城市开展黑臭水体监测,存在高分数据成像周期较长、易受天气因素影响等问题,对于治理效果的监管存在一定滞后性,会造成与群众感官的差异。随着无人机技术的出现,有效弥补了卫星遥感监测上的不足,该技术可在云下低空飞行,具有灵活性大、影像分辨率高、时效性强、成本低等诸多优点[2]。近年来,已有学者利用无人机在水环境遥感监测上进行了初步的研究工作,但飞机搭载的传感器以普通数码相机为主,而搭载多光谱、高光谱、近红外、雷达等专业载荷相对较少[3-6]。此外,利用无人机对城市黑臭水体开展专项遥感调查研究几乎鲜有报道。为此,针对当前城市黑臭水体监管工作的业务需求,本文提出利用多旋翼微型无人机搭载多光谱相机开展黑臭水体监测实验;基于无人机获取的影像数据开展多种图像变换尝试,分析多光谱数据对黑臭水体的识别能力。在此基础上,采用面向对象分类方法提取城市水环境遥感信息,初步形成城市黑臭水体无人机遥感监测技术方法,以期为国内水污染防治行动计划落实提供新的技术支撑。
1 飞行实验概况
1.1 实验方案设计
飞行实验区位于江苏省南京市河西南部(东经118°40′27″,北纬31°59′26″),长期大面积工程建设造成区域内建筑垃圾随意倾倒,水体中存有大量漂浮物,部分水体已呈现黑绿色,暂无明显臭味。选择2016年5月13日开展无人机飞行,实验当天天气晴朗,风力小于2级,具有较好的气象条件。航飞前对现场进行实地踏勘,检查航拍区域的基本情况,确定安全起飞和降落的位置。同时,为消除光照变化、拍摄角度等原因引起的相同地物点在不同无人机影像上的辐射信息不一致问题,起飞前、后均使用原厂自带白板进行初步校正。在此基础上,采用替代定标法进行反射率计算,即在地面用地物光谱仪测量参照物的反射率光谱曲线,建立地物反射率与影像灰度值之间的线性关系[7]。
1.2 无人机载荷
飞行实验采用美国生产的Octocopter八旋翼无人机,飞机直径为1 300 mm,最大载重约16.0 kg,最大飞行时间约48 min,具有垂直起降、定点悬停、中慢速巡航飞行等功能,较适合开展多重复、定点、多尺度、高分辨作业[2]。飞机搭载了轻型的MicaRedEdge多光谱相机(重约150 g),可获取蓝、绿、红、红边、近红外5个波段的信息,最大空间分辨率可达8 cm,采用12-bit RAW格式进行数据存储。此外,MicaRedEdge多光谱相机的波段设置近似于2008年德国发射的RapidEye卫星载荷(表1),影像具有较好的代表性、可比性,将成为土地利用监测、土地分类、环境监测等的重要数据源[8]。

表1 不同传感器波长范围Table 1 The wavelength range of different sensors
2 研究方法
2.1 无人机影像预处理
针对微型无人机获取的图像覆盖范围小,飞行路线和姿态的变化、摄像镜头的光学畸变等因素,也会导致获取的遥感图像无规律、灰度不一致、存在几何畸变的可能[2]。本文利用Pix4D mapper软件,对无人机图像进行匹配、拼接、校正等。Pix4D mapper可自动读取相机的基本参数(相机型号、焦距、像主点等),处理过程不完全依赖姿态信息,只需提供影像曝光点GPS信息,自动进行光束法区域网平差[9]。无人机数据预处理包括完成影像特征点提取、匹配、相机参数优化、控制点信息载入,点云加密及平滑滤波,数字表面模型和正射影像生成等[10]。
2.2 影像特征信息变换
无人机拍摄的影像空间分辨率较高、空间信息量丰富,但光谱分辨率相对较低。为有效挖掘影像的特征信息,利用ENVI软件,对多个波段进行一系列的数学计算,增强不同类别地物的光谱差异。经筛选,选用了卫星遥感影像信息变换中常用的光谱指数、主成分变换、纹理分析3类变换方法[11-16],详见表2。
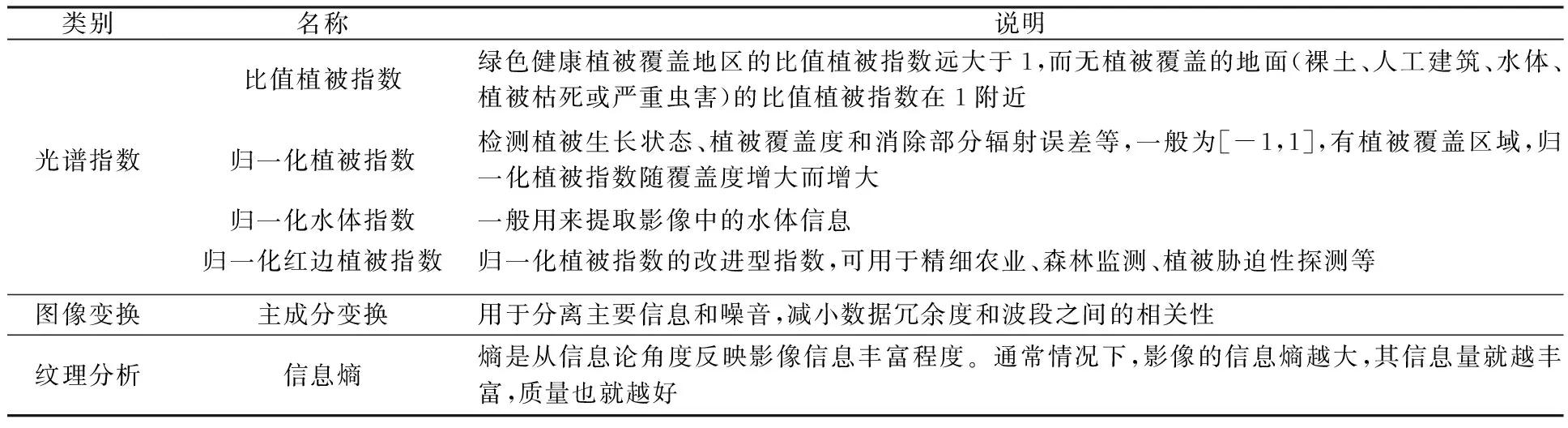
表2 遥感影像信息变换方法Table 2 The list of different remote sensing image transformation methods
2.3 影像专题信息提取
与传统基于像元的遥感分类方法相比,基于面向对象的方法以具有丰富语义信息对象作为解译目标,对黑臭水体等小区域信息特征的提取更加有效。利用eCognition软件,通过合并影像相邻的像素或小的分割对象,在保证对象之间平均异质性最小、对象内部像元之间同质性最大的前提下,实现影像分割[17]。在此基础上,利用标准最邻近分类法(Standard Nearest Neighbor Classification)提取黑臭水体的专题信息。首先,标准最邻近分类法要定义影像对象的类别,从各个类别中选取具有代表性的样本,将具有代表性的样本组成样本集合。然后,获取优化的特征空间,精确地区分地物类别[18]。技术流程见图1。
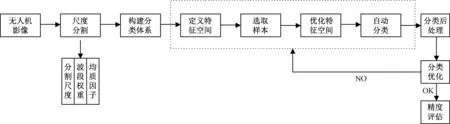
图1 面向对象最邻近分类技术流程Fig.1 Flow chart of the nearest neighbor classification technology
3 结果与讨论
3.1 影像基本特征分析
无人机获取的5个波段图像经质量检查后,未发现无规律、灰度偏差、明显几何畸变等问题。如图2所示,与时间相近的GF-2卫星遥感影像(2016年7月8日,融合后空间分辨率为1 m)相比,无人机影像上地物清晰,具有更加丰富的色彩和纹理特征,可有效补充卫星影像上无法识别的小型河道及周边的生态景观状况。
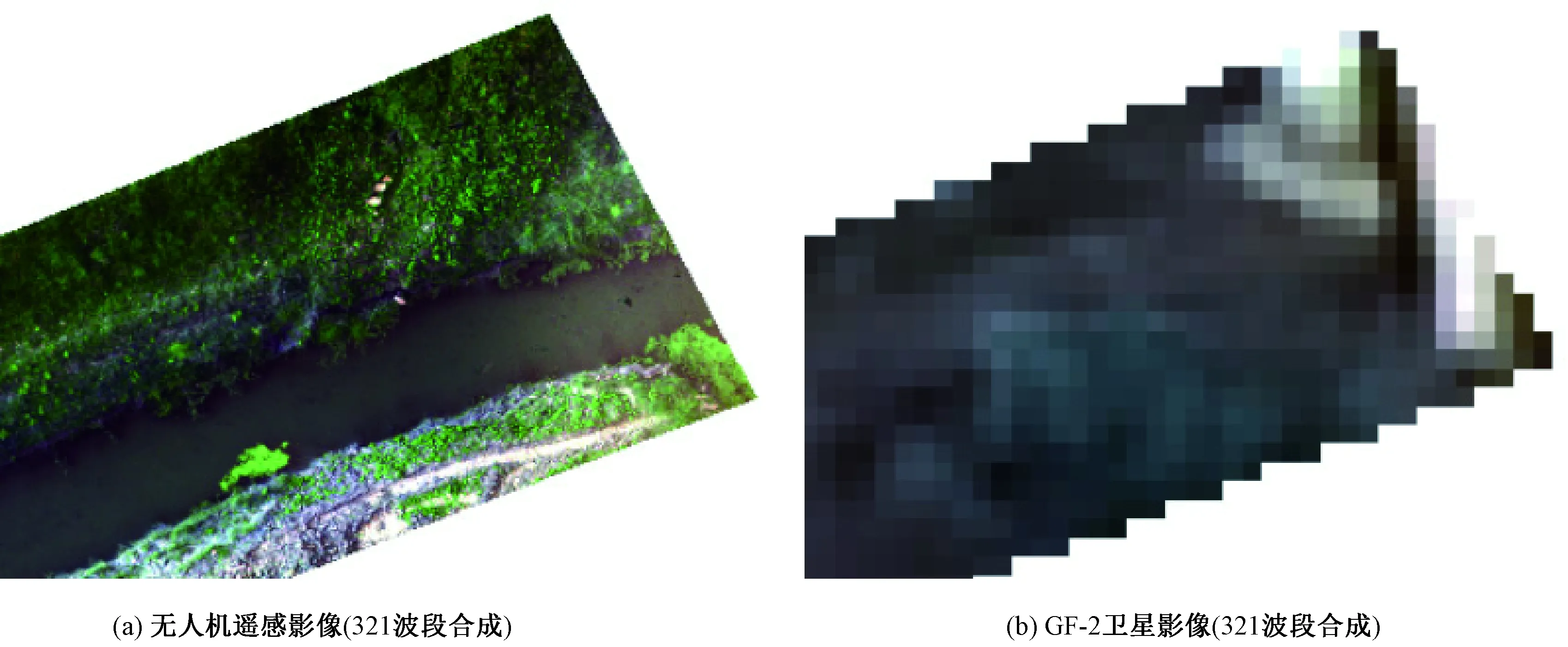
图2 无人机和GF-2遥感影像Fig.2 Remote sensing images of UAV and GF-2 satellite
无人机影像特征统计结果如表3、表4所示。蓝、绿、红、红边、近红外波段的灰度值取值范围为[4 832.00,65 220.00],平均值取值范围为[11 437.66,28 890.23],标准差范围为[4 614.14,16 443.37],其中蓝波段的信息量相对较小,近红外波段的信息量相对较大;从波段的相关性上看,蓝和红具有较高的相关性(相关系数为0.94),近红外与蓝、近红外与红边相关性较低(相关系数分别为0.03、-0.05)。选择(近红外波段+蓝波段)和(近红外波段+红波段),并减少(蓝波段+红波段)的彩色组合,可最大限度地降低波段间的冗余度,获得较好的目视效果。

表3 无人机影像特征值统计Table 3 Statistical characteristic of UAV images
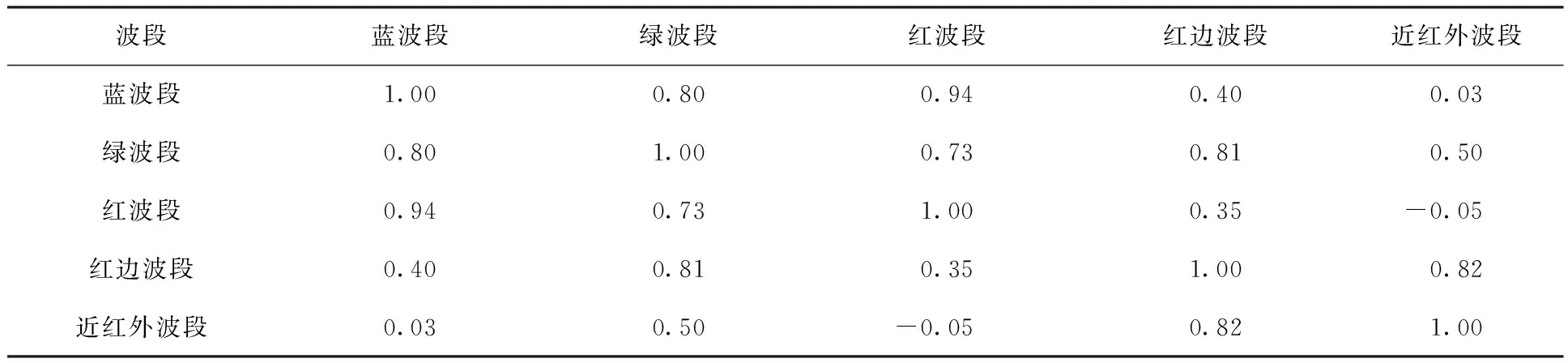
表4 无人机影像相关性分析Table 4 UAV image correlation analysis
3.2 特征地物信息提取
3.2.1 尺度分割与分类构建
本次无人机飞行获取的影像覆盖范围较小,地物类型及结构相对简单,以河道及周边草(灌)景观为主。根据实践经验,将各波段权重设置为1,分割尺度设置为250,形状因子、紧致度因子分别设置为0.1、0.5时,可较好地区分水体、灌丛、草地、漂浮物、裸地。5类地物光谱曲线,见图3。

图3 不同类型地物灰度值曲线Fig.3 DN curves of different ground objects
可见,水体、裸地、漂浮物和植被类(灌丛和草地)在蓝到近红外波段之间具有较好的分离度;水体、裸地的灰度值分别在[10 692.54,17 200.37]、[30 440.68,34 480.80]范围内;而灌丛、草地和漂浮物在蓝、绿、红、红边波段的取值相近,但在近红外波段出现较大差异,3类均值分别为47 060.84、40 246.57、26 986.80。
3.2.2 特征空间选择
对无人机影像进行光谱指数、主成分分析、纹理变换分析,结果见表5。可见,总体上光谱指数比信息熵、主成分分析方法更能明显增强植被、水体、裸地、漂浮物等不同地物之间的信息差异。从光谱指数上看,比值植被指数和归一化植被指数对灌丛、草地、漂浮物具有较好的识别能力,但很难区分水体和裸地。归一化水体指数对水体、裸地、漂浮物具有较强的敏感性,但对分离灌丛和草地能力一般。所有指数中,归一化红边植被指数对地物的敏感性最低。若将上述敏感指数组合使用,可有效提升地物的判别精度。从3个主成分的特征上看,第一主成分贡献率最高,达到了97.20%,能够较为清晰地分辨水体、植被、裸地。但图像上灌丛和草地的区分度较低。从纹理特征上看,影像上水体、裸地的信息熵相对较为稳定,分别在0.80、2.14上下略有波动。灌丛、草地、漂浮物的信息熵在绿到红波段之间表现为略有下降,但总体特征相近。

表5 不同地物的特征变量均值Table 5 The mean value of characteristic variables of different ground objects
3.2.3 标准最邻近分类
无人机影像的数据量大,若分类特征越多,带来特征冗余越大,导致计算量的猛增,造成分类效率的降低[18]。因此,在使用原始波段的基础上,优先选择判别能力较高的光谱指数参与分类,共计9个特征变量,即蓝波段、绿波段、红波段、红边波段、近红外波段、最大化差异度量、亮度、归一化植被指数、归一化水体指数。分类样本的分离度分析,结果见表6。可见,当选择5维特征空间(归一化植被指数、红边波段、红边波段、绿波段、归一化水体指数)时,类别之间的可分性最大(分离度达到0.25);各类中裸地和灌丛的分离度最高,达到了4.12,水体和漂浮物的相似度最高,分离度值仅为0.25。

表6 不同地物类型的分离度矩阵Table 6 Resolution matrix of different ground objects
3.3 精度评估与分析
由表7可以看出,影像的总体分类精度为93.16%,Kappa系数为0.88。灌丛、裸地、水体的形状非常规则,纹理特征明显,亮度值有差异,分类正确率较高。部分漂浮物和稀疏草地光谱特征相近,较难分辨,容易造成混淆,使分类精度略有下降。总体分类结果如图4所示,区域内水体、灌丛、草地、漂浮物、裸地面积分别为1 212.14、1 045.78、1 781.27、76.47、137.86 m2。

表7 分类精度评价Table 7 Accuracy assessment on classification
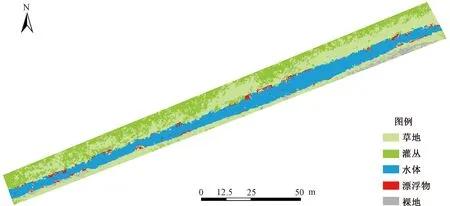
图4 黑臭水体分类结果Fig.4 The classification results of malodorous black water
经现场核查发现,该河流由于缺少相关的管控措施,河道两侧水域以未清理的水生植物、水华藻类等所形成的腐败物为主,河道中央存在一定数量的漂浮垃圾,是水体发黑的主要区域;岸带上为无序生长的草(灌)和堆放建筑垃圾的裸土地。此外,核查中并未发现城镇污水处理厂尾水排口、工业企业事故性排放等其他污染源排入。
4 结语
针对当前城市黑臭水体筛查和监管工作的需求,利用微型无人机搭载多光谱相机获取的影像,开展了无人机遥感数据预处理、光谱特征变化分析、专题信息提取等一系列研究工作,较高精度地提取了城市水环境信息,初步形成了一套适合于城市黑臭水体的无人机遥感监测的技术方法,具有开展业务化监测的应用潜力。但在研究中也发现,未来城市黑臭水体无人机遥感监测还应重点关注以下2个方面:
1)大部分无人机影像的空间分辨率很高,对黑臭水体水色及水域周边典型地物具有较好的判别能力。但如何利用无人机影像光谱特征界定水体轻度和重度黑臭级别,建立与黑臭水体透明度、溶解氧、氨氮等常规监测指标之间的关系,识别黑臭水体的点源、面源、内源等不同类型的污染源,还需要进一步研究和探索。
2)现有黑臭水体无人机遥感监测以水色光谱特征差异为基础,判定水体黑的情况,但对臭的问题并无探测能力。因此,加强无人机轻便型气体遥感监测设备的研发,形成对H2S、NH3等气体的协同探测能力,也将是城市黑臭水体无人机遥感监测发展的关键内容。
参考文献(References):
[1] 国务院. 国务院关于印发水污染防治行动计划的通知:国发〔2015〕17号[EB/OL](2015-04-16)[2017-01-01].http://www.gov.cn/zhengce/content/2015-04/16/content_9613.htm.
[2] 汪沛, 罗锡文, 周志艳, 等. 基于微小型无人机的遥感信息获取关键技术综述[J]. 农业工程学报, 2014,30(18):1-12.
WANG Pei, LUO Xiwen, ZHOU Zhiyan, et al. Key Technology for Remote Sensing Information Acquisition Based on Micro UAV[J]. Transactions of the Chinese Society of Agricultural Engineering, 2014,30(18):1-12.
[3] 洪运富, 杨海军, 李营, 等.水源地污染源无人机遥感监测[J]. 中国环境监测, 2015,31(5):163-166.
HONG Yunfu, YANG Haijun, LI Ying, et al. Monitoring of Water Source Using Unmanned Aerial Vehicle Remote Sensing Technology[J]. Environmental Monitoring in China, 2015,31(5):163-166.
[4] 程翔, 杨波, 李倩霞. 无人机摄影测量在水体污染评估中的应用[J]. 测绘与空间地理信息, 2016,39(8):180-185.
CHENG Xiang, YANG Bo, LI Qianxia. Application of Unmanned Aerial Vehicle Photogrammetry to Water Quality Assessment[J]. Geomatics & Spatial Information Technology, 2016,39(8):180-185.
[5] KRAAIJENBRINK P D A, SHEA J M, PELLICCIOTTI F, et al. Object-Based Analysis of Unmanned Aerial Vehicle Imagery to Map and Characterise Surface Features on a Debris-Covered Glacier[J]. Remote Sensing of Environment, 2016, 186:581-595.
[6] 毕凯,李英成,丁晓波,等.轻小型无人机航摄技术现状及发展趋势[J].测绘通报, 2015(3):27-31.
BI Kai,LI Yingcheng,DING Xiaobo, et al. Aerial Photogrammetric Technology of Light Small UAV:Status and Trend of Development[J]. Bulletin of Surveying and Mapping, 2015(3):27-31.
[7] 杨贵军, 万鹏, 于海洋, 等.无人机多光谱影像辐射一致性自动校正[J]. 农业工程学报, 2015,31(9):147-153.
YANG Guijun, WAN Peng, YU Haiyang, et al. Automatic Radiation Uniformity Correction of Multispectral Imagery Acquired with Unmanned Aerial Vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering, 2015,31(9):147-153.
[8] 王广亮, 李英成, 陈志军,等. RapidEye卫星影像质量分析与彩色合成方案研究[J]. 遥感信息,2011,2:98-101.
WANG Guangliang, LI Yingcheng, CHEN Zhijun, et al. Quality Analysis and Color Composition Scheme of RapidEye Satellite Image[J]. Remote Sensing Information, 2011,2:98-101.
[9] KUING O, STRECHA C, BEYELEM A, et al. The Accuracy of Automatic Photogrammetraic Techniques on Ultra-Light UAV[C]. The International Archives of the Photogrammetry. Remote Sensing and Spatial Information Sciences(UAV-g). Switzerland:Zurich,2011:1-6.
[10] 刘杰, 李卫正, 张青萍, 等.基于小型UAV的森林公园正射影像制图分析——以上海滨江森林公园为例[J]. 西北林学院学报, 2016,31(2):213-218.
LIU Jie, LI Weizheng, ZHANG Qingping, et al. DOM Mapping Analysis of Forest Park Based on UAV-A Case Study of Shanghai Riverside Forest Park[J]. Journal of Northwest Forestry University, 2016, 31(2):213-218.
[11] OYAMA Y, MATSUSHITA B, FUKUSHIMA T. Distinguishing Surface Cyanobacterial Blooms and Aquatic Macrophytes Using Landsat/TM and ETM+Shortwave Infrared Bands[J]. Remote Sensing of Environment, 2015, 157:35-47.
[12] ZHAO D H, JIANG H, YANG T W, et al. Remote Sensing of Aquatic Vegetation Distribution in Taihu Lake Using an Improved Classification Tree with Modified Thresholds[J]. Journal of Environmental Management, 2012, 95(1):98-107.
[13] 侍晨,张婷,李旭文,等.基于多星遥感影像的太湖北部湖湾春季沉水植被分布动态监测[J].环境监控与预警,2016(1):13-18.
SHI Hao, ZHANG Ting, LI Xuwen, et al. Dynamic Monitoring of Distribution of Submerged Vegetation in the North of Taihu Lake in Spring Based on Multi Source Remote Sensing Images[J]. Environmental Monitoring and Forewarning, 2016(1):13-18.
[14] 林川,宫兆宁,赵文吉. 基于中分辨率TM数据的湿地水生植被提取[J]. 生态学报, 2010, 30(23):6 460-6 469.
LIN Chuan, GONG Zhaoning, ZHAO Wenji. The Extraction of Wetland Hydrophytes Types Based on Medium Resolution TM Data[J]. Acta Ecologica Sinica, 2010,30(23):6 460-6 469.
[15] 韩鹏, 龚健雅,李志林. 基于信息熵的遥感分类最优空间尺度选择方法[J]. 武汉大学学报(信息科学版), 2008,33(7):676-679.
HAN Peng, GONG Jianya, LI Zhilin. A New Approach for Choice of Optimal Spatial Scale in Image Classification Based on Entropy[J]. Geomatics and Information Science of Wuhan University, 2008,33(7):676-679.
[16] 徐涵秋, 唐菲. 新一代Landsat系列卫星:Landsat 8遥感影像新增特征及其生态环境意义[J]. 生态学报, 2013,33(11):3 249-3 257.
XU Hanqiu, TANG Fei. Analysis of New Characteristics of the First Landsat 8 Image and Their Eco-Environmental Significance[J]. Acta Ecologica Sinica, 2013,33(11):3 249-3 257.
[17] 易凤佳, 李仁东, 常变蓉,等. 面向对象的丘陵区水田遥感识别方法[J]. 农业工程学报, 2015,31(11):186-193.
Yi Fengjia, Li Rendong, Chang Bianrong, et al. Remote Sensing Identification Method for Paddy Field in Hilly Region Based on Object-Oriented Analysis[J]. Transactions of the Chinese Society of Agricultural Engineering, 2015,31(11):186-193.
[18] 周龙君, 陈晓芬, 杨利娟. 面向对象标准最邻近分类法在地理国情监测中的应用[J]. 测绘与空间地理信息, 2016,39(5):155-157.
ZHOU Longjun, CHEN Xiaofen, YANG Lijuan. Object-Based Standard Nearest Neighbor Classification Used in National Geomatics Monitoring[J]. Geomatics & Spatial Information Technology, 2016,39(5):155-157.