基于多模型迭代的车辆状态融合估计方法
2018-07-05蔡英凤江浩斌
陈 特 陈 龙,2 蔡英凤,2 徐 兴,2 江浩斌,2
(1.江苏大学汽车与交通工程学院, 镇江 212013; 2.江苏大学汽车工程研究院, 镇江 212013)
0 引言
近年来,包括电子稳定系统、制动防抱死系统、牵引力控制系统、驱动防滑系统在内的主动安全系统在车辆上应用越来越广泛[1-4]。良好的车辆系统闭环控制需要精确可靠的车辆状态测量值[5-8],然而包括质心侧偏角在内的一些车辆状态难以采用车载传感器直接测量得到,或者考虑到传感器成本过高的因素,人们越来越倾向于设计可行的观测器对部分车辆状态进行准确估计,从而为车辆控制系统提供依据。
目前关于车辆行驶状态估计已有许多研究成果[9-10],其中车辆质心侧偏角估计是重要的研究方向之一。车辆状态估计常用的算法包括Kalman滤波[11-15]、滑模观测器[16]、非线性观测器[17]和鲁棒观测器[18]等,其中Kalman滤波及其改进算法(如扩展Kalman、无迹Kalman、容积Kalamn、粒子Kalman等)应用最为广泛。随着研究的深入,研究者开始将卡尔曼滤波与其他估计理论进行结合,通过模型或观测器之间的相互迭代,利用已知信息的冗余度来提高估计精度。BOADA等[13]采用自适应神经网络和无迹Kalman滤波结合的方式,提出了一种新的质心侧偏角估计方法。LIU等[14]提出采用最小模型误差算法和扩展Kalman滤波结合的方式设计质心侧偏角观测器,旨在减小轮胎力输入误差和不确定性对估计的影响。现有的车辆状态估计研究大多关注于估计性能的提升与估计成本的降低,通常采用误差迭代和数据融合的方式来提高估计的可靠性。LI等[19]基于不同形式的车辆模型设计了质心侧偏角观测器,并利用GPS和惯性系统采集数据的冗余性,通过观测器迭代和误差补偿的方式提高估计精度。YOON等[20]利用低成本的单天线GPS的测量值,结合惯性装置采集的数据信息,通过数据融合实现了质心侧偏角的可靠估计。
本文基于车辆动力学模型设计强跟踪滤波器,用于行驶状态估计。结合四轮轮速的耦合关系,考虑数据扰动和病态矩阵对估计的影响,提出采用岭估计算法对车辆行驶状态进行估计。为进一步提高估计系统的估计精度与抗干扰能力,提出动力学模型观测器与运动学模型观测器补偿与迭代的估计方式,设计模糊控制器进行车辆状态估计信息的动态加权融合,并将质心侧偏角和滑移率的伪测量值反馈到模糊控制器中用于权重判断,以期形成闭环迭代系统以确保估计系统的可靠性与多工况自适应性。
1 车辆模型
1.1 车辆动力学模型
1.1.1三自由度车辆模型
如图1所示,建立具有纵向、侧向以及横摆运动的三自由度车辆动力学模型。固定在车辆上的动坐标系xOy原点与车辆质心重合,x轴为车辆纵向对称轴,规定向前为正;y轴通过车辆质心,规定向左为正;所有坐标系平面内的角度和力矩以逆时针方向为正,所有矢量的分量以与坐标轴同向为正。忽略悬架以及车辆垂向运动,忽略车辆绕y轴的俯仰运动和绕x轴的侧倾运动,认为车辆各个轮胎的机械特性相同。车轮1、2、3、4分别对应左前、右前、左后、右后车轮。三自由度车辆模型的动力学方程为
(1)
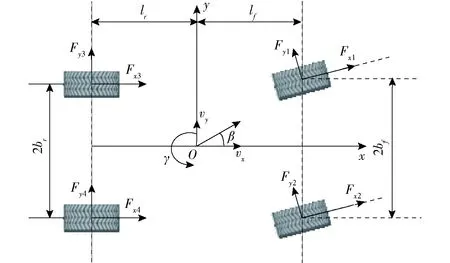
图1 三自由度车辆模型Fig.1 Vehicle model with three degree of freedom
式中vx——纵向车速vy——侧向车速
γ——横摆角速度m——汽车质量
Fxj——轮胎纵向力,j=1,2,3,4
Fyj——轮胎侧向力,j=1,2,3,4
δ——前轮转角
Iz——绕z轴的转动惯量
lf——质心距前轴的距离
lr——质心距后轴的距离
bf——前轮距的1/2
br——后轮距的1/2
1.1.2轮胎模型
采用半经验魔术公式轮胎模型对轮胎力进行估计,公式为
Y=Dsin(Carctan(Bα-
E(Bα-arctan(Bα))))
(2)
式中Y——纵、横向轮胎力B——刚度因子
C——曲线形状因子D——峰值因子
E——曲线曲率因子α——车轮侧偏角
轮胎模型参数B、C、D、E都与轮胎的垂直载荷相关,各轮胎的垂直载荷为
(3)
式中Fz1、Fz2、Fz3、Fz4——对应轮胎的垂直载荷
h——质心高度g——重力加速度
各轮胎侧偏角为
(4)
式中α1、α2、α3、α4——对应轮胎的侧偏角
1.2 车辆运动学模型
设车辆纵向加速度和横向加速度分别为ax、ay,则车辆纵横向运动学关系可表示为
(5)
且四轮轮速耦合关系可表示为
(6)
式中r——车轮有效半径
n1、n2、n3、n4——4个车轮轮速
2 车辆状态融合估计方法
2.1 基于强跟踪滤波的车辆状态估计
强跟踪滤波相较卡尔曼滤波在预报误差协方差阵中引入了渐消因子,比卡尔曼滤波具有更强的系统状态实时跟踪能力。强跟踪滤波算法步骤为:
(1)计算残差及均方误差矩阵
r(k+1)=Y(k+1)-H(k+1)(k+1)
(7)
式中ρ——遗忘因子
遗忘因子满足0≤ρ≤1,取ρ=0.95。
(2)计算次优渐消因子
(8)
其中
式中β——弱化因子,β≥1
(3)计算预测协方差阵与增益阵
(9)
(4)计算状态估计协方差阵与状态估计值
(10)
由三自由度车辆动力学模型和轮胎模型,建立状态空间方程用于强跟踪卡尔曼滤波器设计
(11)
其中
式中w(t)——符合高斯分布的过程噪声
v(t)——符合高斯分布的量测噪声
从而可设计相应的车辆状态强跟踪滤波器,记所得的强跟踪滤波结果为vxSTF、vySTF、γSTF。
2.2 基于岭估计法的车辆状态估计
根据式(6)中的轮速耦合关系,可将系统的观测方程表示为
Y=Hξ+V
(12)
式中Y——观测向量ξ——待观测向量
H——观测矩阵V——零均值白噪声

根据式(12)特点,可知能够采用最小二乘法(RLS)进行车辆状态估计。最小二乘估计准则为计算得到最优估计使观测误差的二次函数最小化,即
minJ=VTV=[H-Y]T[H-Y]
(13)
=[HTH]-1HTY
(14)
理论上式(6)中的n1、n2、n3、n4皆为理想轮速,但理想轮速与实际轮速不可能完全相等。此外,待估计的质心侧偏角与轮速不是同一量级,若矩阵H为病态矩阵,非常小的不确定因素都会导致RLS出现较为严重的估计误差。假设式(6)中存在扰动,表示为
Y+ΔY=(H+ΔH)(ξ+Δξ)
(15)
展开并化简式(15),可得
ΔY=HΔξ+ΔHξ+ΔHΔξ
(16)
则RLS估计结果对于病态矩阵的敏感程度可表示为
Δξ=-H-1ΔHξ-H-1ΔHΔξ+H-1ΔY
(17)
对式(17)求取范数,可得
‖Δξ‖=‖H-1‖(‖ΔH‖‖ξ‖+
‖ΔH‖‖Δξ‖+‖ΔY‖)
(18)
推导可得
(19)
设C=‖H-1‖‖H‖,可得
(20)
观察式(20)可知,C越大,就越敏感。根据以上分析可知,若同时增大病态矩阵H的特征值,则C就会一定程度的减小,从而提高RLS估计的鲁棒性。
根据以上分析,采用岭估计法来抑制病态矩阵对估计的影响。岭估计算法本质上是一种改进的最小二乘算法,设病态矩阵H的特征值增量为K1,由式(14)可得岭估计模型下ξ的估计量为
=[HTH+K1I]-1HTY
(21)
式中I——单位矩阵
则用于车辆状态估计的岭估计算法可表示为
(22)
式中K2(k)——卡尔曼增益矩阵
P(k)——协方差矩阵
ρ0——岭估计遗忘因子
ρ0用来平衡估计结果的快速跟踪能力与抗干扰能力。从而可得相应的车辆状态岭估计结果,记为vxR、vyR、γR。
2.3 加权迭代融合估计
2.1节中基于车辆动力学模型所设计的强跟踪卡尔曼滤波器,大多情况下能得到较为精确的估计结果,但该观测器比较依赖精确的轮胎力模型,在一些复杂工况如轮胎处于强非线性区域时,该估计结果会出现一定程度的偏差。2.2节中所采用的岭估计算法,在继承最小二乘算法优点的同时,提高了估计的可靠性,但该估计器比较依赖准确的轮速信息,在轮胎出现滑移时估计效果会受到影响。因此,可将基于动力学模型和运动学模型所得的估计量视为伪测量值,通过多模型观测器信息之间的迭代与加权融合的方式提高车辆状态估计精度与可靠性。提出的车辆状态融合估计策略如图2所示。
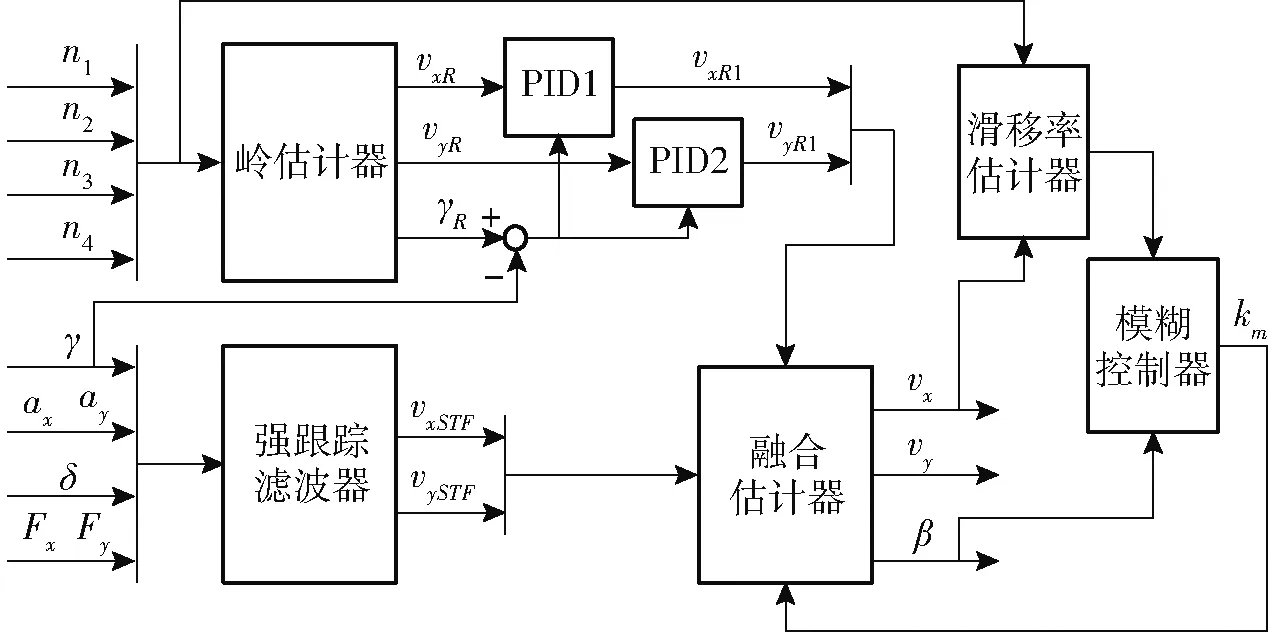
图2 车辆状态融合估计策略Fig.2 Vehicle state fusion estimation strategy
考虑岭估计器可能存在的由模型不确定性引起的偏差,分别设计PID控制器1和2用于纵横向车速估计的偏差补偿。将岭估计器横摆角速度估计偏差Δγ=γR-γ作为控制器PID1和PID2的输入,得到补偿后的纵横向车速为
(23)
式中kPID1、kPID2——PID控制器得到的补偿系数
轮胎纵向滑移率为
(24)

(25)
同时,采用最后质心侧偏角的融合估计结果视为伪测量值输入到模糊控制器中,纵向车速的融合估计结果输入到滑移率估计器中,为下一步的迭代估计提供判断基准,从而利用基于多模型观测器之间的误差迭代与补偿,提高整个估计系统的可靠性、抗干扰能力以及多工况自适应性。
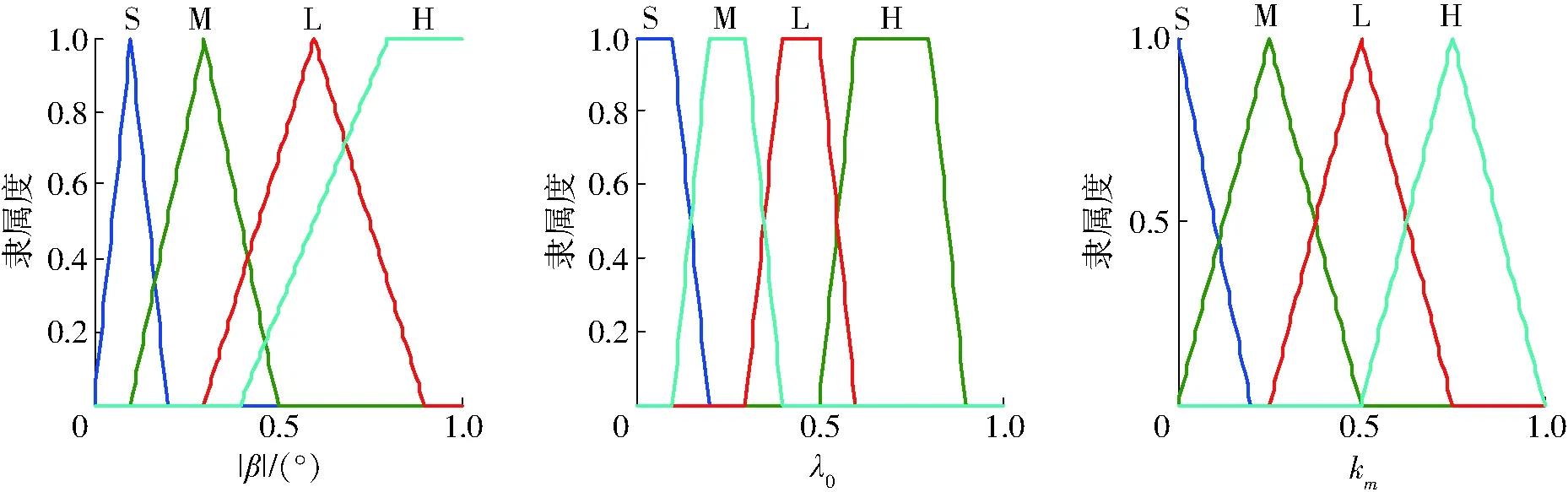
图3 隶属度函数Fig.3 Degree of membership functions
λ0|β|SMLHSSMMLMMLLHLLHHHHLHHH
3 仿真验证
为了验证本文提出的估计方法的效果,基于CarSim和Simulink搭建联合仿真平台并进行仿真分析。仿真参数为:m=703.6 kg,r=0.245 m,lf=0.795 m,lr=0.975 m,bf=br=0.775 m,Iz=1 000 kg·m2,Cf=60 000 N/rad,Cr=40 000 N/rad。
3.1 双移线工况
双移线仿真工况如图4所示,仿真时路面附着系数为0.4,车速为20 m/s。估计结果如图5所示,可知强跟踪滤波器和岭估计器都能较好地估计车辆行驶状态。图6所示为仿真时融合权重系数与|β|和λ0的对比,可知在高速低附着的双移线工况下,纵向滑移相对较大,此时纵向滑移对岭估计产生了一定的影响,岭估计器的估计精度低于强跟踪滤波器,可以看出此时融合权重系数km相对较小,即在融合结果中强跟踪估计占有更大比重,从而验证了提出的加权迭代融合估计方法能有效提升车辆状态的估计精度。
图4 双移线工况Fig.4 Double lane changes manoeuvre
3.2 J-turn工况

图5 车辆行驶状态估计(双移线工况)Fig.5 Estimation of vehicle running state
如图7所示,J-turn工况设定如下:0~1 s,方向盘转角从0°激增到90°;1~4 s,方向盘转角保持90°不变;4~10 s,方向盘转角逐渐回正为0°。仿真时路面附着系数为1.0,同时考虑车速变化的情况,在10 m/s的基础车速上叠加一个幅值为1频率为1 rad/s的正弦波,用来模拟复杂工况下车速时变的特性,仿真结果如图8所示。在快速转向的剧烈工况下,与双移线工况仿真结果类似,所提出的估计方法仍能保持较好的估计性能。图9所示为J-turn仿真工况下的融合权重系数。可知在高附着条件下,纵向滑移减小,此时λ0对融合权重系数的影响减弱。由于在所设定的J-turn工况下,车辆质心侧偏角相对较大,此时强跟踪滤波器的估计精度相对来说低于岭估计器,融合权重系数km相应增大,意味着融合估计结果中岭估计所占比重增加。所提出的融合估计方法此时仍能兼顾两种估计器的优势,保证了估计精度,同时提高了估计系统的抗干扰性能。

图6 融合权重系数(双移线工况)Fig.6 Fusion weight coefficient
图7 J-turn工况Fig.7 J-turn manoeuvre

图8 车辆行驶状态估计(J-turn工况)Fig.8 Estimation of vehicle running state
图9 融合权重系数(J-turn工况)Fig.9 Fusion weight coefficient
4 实车验证
图10所示为蛇形实车道路实验时的实验装备和场景、行驶轨迹示意图、四轮轮速以及方向盘转角。所使用的实验车为一款改装的四轮独立驱动电动汽车,基于快速原型搭建了整车控制系统,采用Vehicle Spy进行传感器数据记录。实验道路为一条平直沥青道路,道路上每间隔30 m安放标桩来模拟蛇形工况,实验结果如图11所示。可知岭估计器能实时跟踪车辆状态的变化趋势,但观察侧向车速和质心侧偏角估计结果可以发现,虽然岭估计算法能整体上跟踪车辆状态趋势,但估计结果存在一些波动,这是因为侧向车辆状态的大小与轮速不是同一量级,微小的干扰便可能导致相对较大的估计波动,而所设计的岭估计器此时仍能保持较好的估计结果,波动范围相对侧向状态的量级来说也相对较小。强跟踪滤波器具有较好的估计精度与稳定性,但该基于动力学模型所设计的滤波器在估计实时性上相对来说弱于岭估计器。图12所示为融合权重系数。与仿真结果变化趋势吻合,融合权重系数能根据质心侧偏角与纵向滑移的变化,动态调节强跟踪估计与岭估计所占权重,能够较好地实时跟踪车辆状态,提高了车辆状态估计的精度与可靠性。
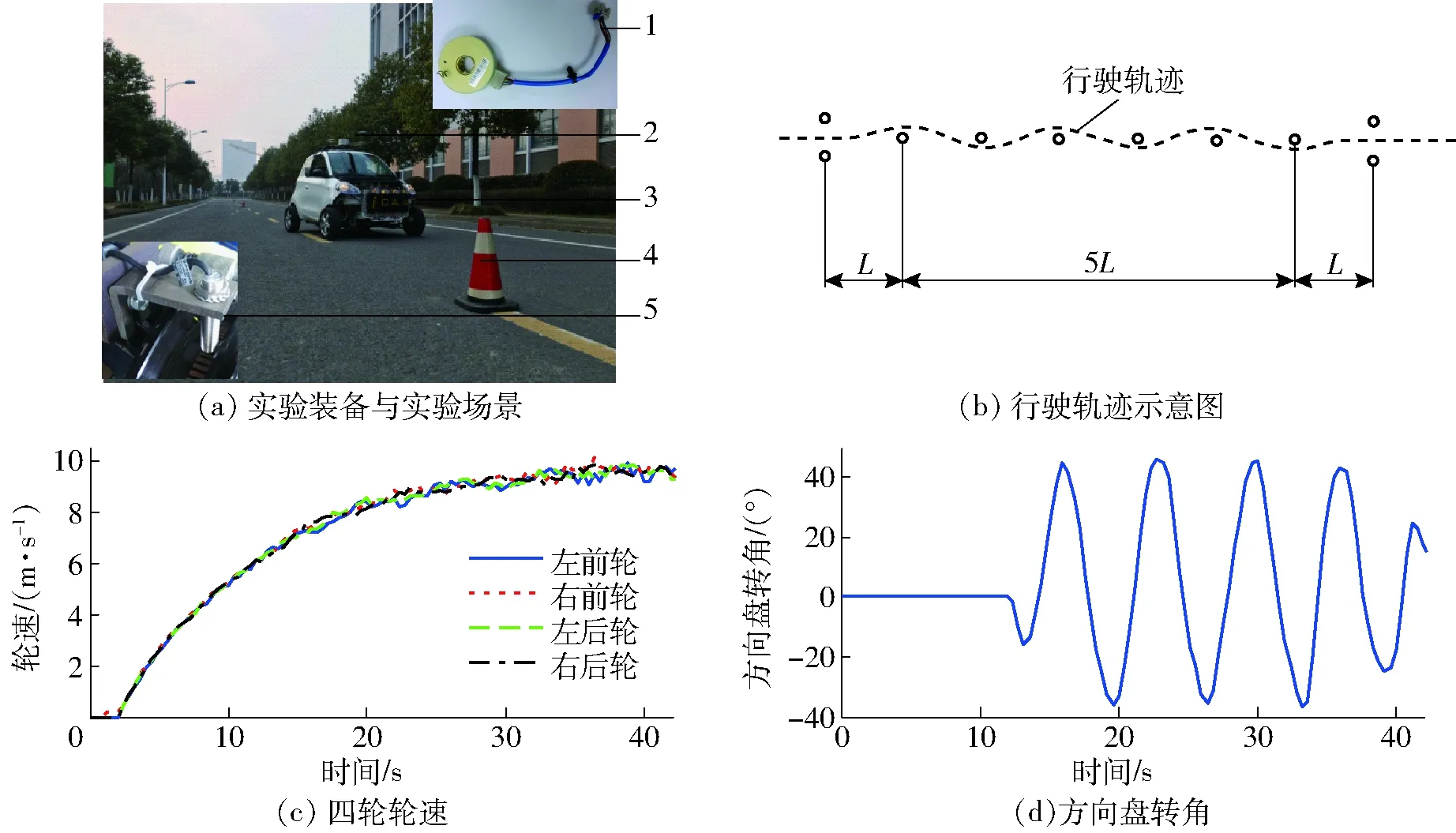
图10 道路实验Fig.10 Road test1.方向盘转角传感器 2.GPS/INS 3.电机控制器 4.方向盘标桩 5.轮速传感器

图11 车辆行驶状态估计(实车)Fig.11 Estimation of vehicle running state
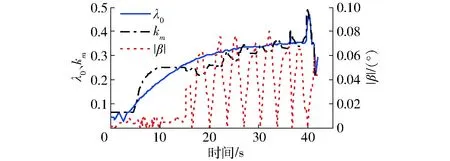
图12 融合权重系数(实车)Fig.12 Fusion weight coefficient
5 结论
(1)设计了强跟踪滤波算法并应用于车辆行驶状态估计,同时,提出采用四轮轮速耦合关系进行车辆行驶状态估计的新思路,并考虑到轮速和待估计的侧向车辆状态非同一量级,微小的数据扰动或者
可能存在的病态矩阵都会导致较大的估计误差,从而设计了岭估计算法用于车辆行驶状态估计,进一步提高了车辆状态估计的可靠性。
(2)采用基于动力学模型观测器与运动学模型观测器结合的估计方式,利用多模型耦合观测器信息迭代与误差补偿的方式对传感器信息和伪测量信息进行融合,提高了整个估计系统的精度与抗干扰能力。
(3)分别进行了双移线和J-turn工况的联合仿真以及实车道路实验,结果表明,所提出的车辆状态迭代融合估计方法具有较高的估计精度与可靠性。
1 陈黎卿,胡冬宝,陈无畏. 基于人群搜索算法的四驱汽车扭矩分配控制策略[J/OL]. 农业机械学报,2015,46(11): 369-376. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20151150&flag=1.DOI:10.6041/j.issn.1000-1298.2015.11.050.
CHEN Liqing, HU Dongbao, CHEN Wuwei. Control strategy and experiment of torque distribution for 4WD vehicle based on SOA[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(11): 369-376.(in Chinese)
2 卢山峰,徐兴,陈龙,等. 轮毂电机驱动汽车电子差速与差动助力转向的协调控制[J]. 机械工程学报,2017,53(16): 78-85.
LU Shanfeng, XU Xing, CHEN Long, et al. Coordinated control of electronic differential and differential assist steering for electric vehicle driven by in-wheel motors [J]. Journal of Mechanical Engineering, 2017,53(16): 78-85.(in Chinese)
3 袁朝春,刘慧,陈龙,等. 基于拟人智能决策-规划算法的主动制动系统研究[J/OL]. 农业机械学报,2017, 48(12): 370-379. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20171246&flag=1. DOI: 10.6041/j.issn.1000-1298.2017.12.046.
YUAN Chaochun, LIU Hui, CHEN Long, et al. Investigation of active braking system based on personification intelligent decision planning algorithm[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2017, 48(12): 370-379.(in Chinese)
4 ZHANG H, WANG J M. Vehicle lateral dynamics control through AFS/DYC and robust gain-scheduling approach [J]. IEEE Transactions on Vehicular Technology, 2016, 65(1): 489-494.
5 WANG R R, HU C, YAN F J, et al. Integrated optimal dynamics control of 4WD4WS electric ground vehicle with tire-road frictional coefficient estimation [J]. Mechanical Systems and Signal Processing, 2015, 60-61: 727-741.
6 CHEN T, XU X, LI Y, et al. Speed-dependent coordinated control of differential and assisted steering for in-wheel motor driven electric vehicles [J]. Proc. IMech E, Part D: Journal of Automobile Engineering, https: ∥ doi. org/ 10.1177/ 0954407017728189.
7 CHEN T, XU X, CHEN L, et al. Estimation of longitudinal force, lateral vehicle speed and yaw rate for four-wheel independent driven electric vehicles [J]. Mechanical Systems and Signal Processing, 2018, 101: 377-388.
8 丁能根,李丹华,许景,等. 基于局部线性化的汽车质心侧偏角估计[J/OL]. 农业机械学报,2012,43(1): 6-11.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20120102&flag=1. DOI: 10.6041/j.issn.1000-1298.2012.01.002.
DING Nenggen, LI Danhua, XU Jing, et al. Estimation of vehicle sideslip angle based on local linearization [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(1): 6-11.(in Chinese)
9 徐兴,陈特,陈龙,等. 基于UIO/双KF的4WID-EV驱动轮纵向力估计[J]. 汽车工程,2016,38(9): 1095-1100.
XU Xing, CHEN Te, CHEN Long, et al. Longitudinal force estimation of driving wheels in 4WID-EV based on unknown input observer and dual Kalman filters [J]. Automotive Engineering, 2016, 38(9): 1095-1100.(in Chinese)
10 林程,周逢军,徐志峰,等. 基于补偿自适应控制算法的车辆状态参数估计 [J/OL].农业机械学报,2014,45(11): 1-8.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20141101&journal_id=jcsam.DOI: 10.6041/j.issn.1000-1298.2014.11.001.
LIN Cheng, ZHOU Fengjun, XU Zhifeng, et al. Estimation of vehicle status parameters based on compensation adaptive control algorithm[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014,45(11): 1-8.(in Chinese)
11 LI X, CHAN C, WANG Y. A reliable fusion methodology for simultaneous estimation of vehicle sideslip and yaw angles [J]. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4440-4458.
12 LI L, JIA G, RAN X, et al. A variable structure extended Kalman filter for vehicle side slip angle estimation on a low friction road [J]. Vehicle System Dynamics, 2014, 52(2): 280-308.
13 BOADA B L, BOADA M J L, DIAZ V. Vehicle side slip angle measurement based on sensor data fusion using an integrated ANFIS and an unscented Kalman filter algorithm [J]. Mechanical Systems and Signal Processing, 2016, 72: 832-845.
14 LIU W, HE H W, SUN F C. Vehicle state estimation based on minimum model error criterion combining with extended Kalman filter [J]. Journal of the Franklin Institute, 2016, 353: 834-856.
15 解少博,林程. 基于无迹卡尔曼滤波的车辆状态与参数估计[J].农业机械学报,2011, 42(12): 6-12.
XIE Shaobo, LIN Cheng. State and parameters estimation of vehicle based on UKF[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(12): 6-12.(in Chinese)
16 RATH J, VELUVOLU K, DEFOORT M, et al. Higher-order sliding mode observer for estimation of tyre friction in ground vehicles [J]. IET Control Theory and Applications, 2014, 8(6): 399-408.
17 SOLMAZ S, BASLAMISH S. A nonlinear sideslip observer design methodology for automotive vehicles based on a rational tire model [J]. International Journal of Advanced Manufacturing Technology, 2012, 60: 765-775.
18 ZHANG H, HUANG X, WANG J, et al. Robust energy-to-peak sideslip angle estimation with applications to ground vehicle [J]. Mechatronics, 2015, 30: 338-347.
19 LI X, SONG X, CHAN C. Reliable vehicle sideslip angle fusion estimation using low-cost sensors [J]. Measurement, 2014, 51: 241-258.
20 YOON J H, PENG H. Robust vehicle sideslip angle estimation through a disturbance rejection filter that integrates a magnetometer with GPS [J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(1): 191-204.
