基于状态预测的田间机-地传感器系统协同采集方式研究
2018-07-05李继宇兰玉彬施叶茵张亚莉欧阳帆陈盛德
李继宇 兰玉彬 施叶茵 张亚莉 欧阳帆 陈盛德
(1.华南农业大学工程学院, 广州 510642; 2.国家精准农业航空施药技术国际联合研究中心, 广州 510642; 3.内布拉斯加大学林肯分校生物系统工程系, 林肯 NE 68583)
0 引言
农用无人机作业速度快,突击能力强,应对突发、爆发性病虫害的防控效果好[1]。近年来,我国无人机的农田作业面积呈爆发式增长,许多省份已经展开规模化的无人机植保作业[2]。在无人机田间作业中,作业参数的实时有效采集是对无人机作业质量进行评判与监测的基础[3]。不同于传统田间作业机械,无人机在飞行状态下低空、低速作业,作业靶标位于田间冠层或者地面,作业效果取决于机体的空中飞行参数,也取决于地面靶标作业参数。这种作业方式决定了无人机的作业参数采集必须既要采集机体飞行参数,也要采集地面作业参数,空间与地面传感器系统需要协同采集工作。
在许多非田间无人机应用场合,类似的传感器系统协同采集方式已经展开应用。彭向阳等[4]在无人机电力线路巡检中设计研发了一套无人直升机多传感器电力线路安全巡检系统,通过统一机载多传感紫外、红外、可见光以及激光传感器的时间、空间基准,同步采集输电线路的高精度三维激光点云、影像、视频后进行多源数据的独立与融合处理,完成对线路通道的安全距离检测与诊断;在公路交通中,戴春亮等[5]针对车载传感器感知全局环境信息能力不足以及车辆导航规划轨迹的平滑性、 安全性的问题,提出一种空-地协同的轨迹规划方法,无人机从空中采集广域地面环境图像信息,并实时回传给地面车辆信息处理平台,引入FM2算法计算全局最佳轨迹,实现车辆导航规划轨迹的平滑性和安全性;军事领域中,路志伟等[6]在基于传感器协同技术的雷达搜索空域研究中,给出了在外部目标信息引导下雷达搜索空域确定方法,对各种传感器的引导精度进行了分析,确定了雷达相应的搜索空域。JIN等[7]通过对雷达等多传感器数据的读取,实时确定一组多无人机的机载任务,任务动态随机分布,提高无人机群作战任务的实时执行能力。GROCHOLSKY等[8]则通过无人车传感器精准定位地面目标,结合无人机传感器搜索地面较大目标,设计搜索算法建立两者无缝链接网络,提高目标搜索能力;而在环境监测与救灾方面,ERMAN等[9]聚焦无线传感器的移动性,将无线传感器网络、无人机和执行器集成到一个平台,研究无人机传感器数据的网络聚合、路由以及响应,并应用于救灾环境中。OLLERO等[10]建立了无人直升机、移动无线传感器和监测跟踪平台,探讨与地面无线传感器协同工作的融合方法,并在塞维利亚消防队协助下展开试验。上述无人机传感器系统的协同应用,主要将无人机视为空中移动传感器的载体,探讨无人机与传感器的平台集成方法,然后将空中传感器与地面传感器的数据按照算法融合,系统协同工作。传感器采集的类型以图像、视频、雷达波等可以高空远距离采集的信号为主,算法以提高搜索、识别图像和信号融合为主。而田间植保作业无人机低空、低速的工作特点[11]决定了其传感器系统的数据类型与采集方式必然有别于上述研究。
旋翼无人机田间低空作业与传统农机具作业有着本质区别,其特点表现为:旋翼无人机与农作物之间没有直接物理接触[12],其作业速度较传统地面机具快,局部地面传感器能够有效采集的时间较短。旋翼无人机植保作业必须保持低空低速飞行[13],旋翼产生的风场作用在作物冠层上,直接影响了作业效果与质量,该风场的存在是旋翼无人机与传统植保机具的根本区别[3],获取旋翼风场相关参数除了田间地面传感器的实时感知之外,还与无人机的飞行状态息息相关。而目前快速准确采集旋翼风场相关参数的方法在田间信息传感采集技术中较少见到。李继宇等[14]在杂交水稻无人机授粉作业中对旋翼风场进行了实时采集与处理,并结合单次采集风场时的飞行速度与飞行高度对无人机授粉作业参数做出筛选与评价[15],很好地融合了同一时段内地面作业参数与飞行参数,实时反映出作业效果。但在风场参数采集过程中,没有关注无人机自身的飞行状态,传感器系统地面部分采集时段的起始时刻仅仅由人工目视决定,由于无人机飞行速度相对较快,人工确定的采样时段无法完全有效涵盖地面传感器的最佳采样时段,从而难以获取有效风场参数,降低了采集参数的时效性与有效性。故准确预测出无人机的飞行状态是完成田间机-地传感器系统协同工作的重要基础。
无人机飞行作业时飞行状态为非稳定系统[16],无人机的飞行状态本质上是对飞行物体进行有效跟踪[17]。通过已知的系统状态对未来一段时间内的系统状态做出预测[18],而机载北斗定位系统能给出精准的实时观测值[19],解析无人机实时飞行状态,通过预测算法计算出该状态下风速最大值出现的时刻,则能取代人工目视的采样时刻确定方式,提高旋翼风场采集参数的准确度。此外,在机载北斗定位系统的帮助下,各类小型无人机作业全程的位置信息、风速信息都可以方便地按时间序列予以记录,在线预测及自动采集,方便后续对应分析。
为更好地解决田间旋翼风场参数实时采集的有效性问题,本文综合机载北斗定位系统与田间风速传感器构成旋翼无人机传感器系统,尝试田间机-地协同采集方式,设计无人机状态预测算法用以自动判定地面传感器采集时段的起始点,协同机载传感器与地面传感器系统共同工作,展开田间试验。对采样风速在时间维度上的分布规律进行统计分析,以证明实时风场数据的有效性得到了显著提高。
1 材料与方法
1.1 田间机-地传感器系统
1.1.1地面风场参数传感器
风场参数无线传感器采集网络参照李继宇等[14]介绍的3向线阵风场测量方法,如图1所示。具体为采样节点两两间隔1 m沿垂直水稻父本行排列为一行,传感器放置在距离地面60 cm的冠层高度,依次编号-4 m~4 m和15 m,15 m采样节点用于同步测量对应方向的自然风风速,放置在距离0 m节点约15 m处的远端,无人机沿0 m传感器所在父本行直线飞行。父本行8行,宽4 m,两侧母本行各60行,宽7 m。
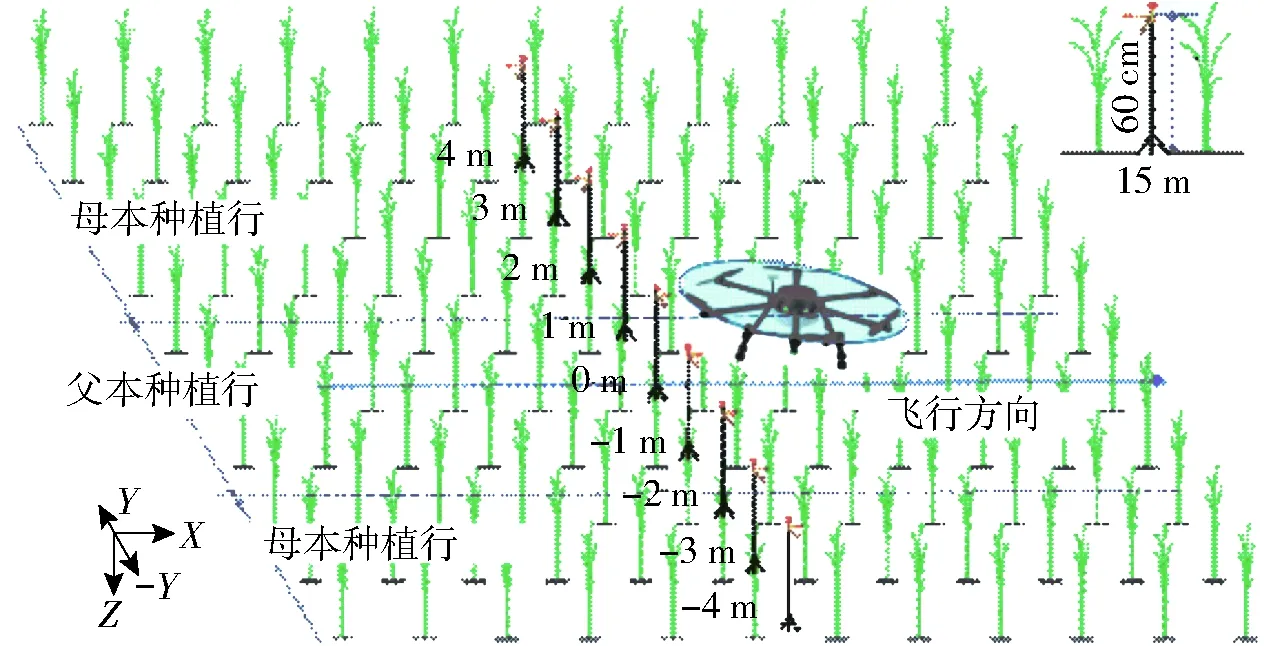
图1 地面风场参数传感器布置示意图Fig.1 Sketch of wind field parameter sensors on ground
每个节点上布置3个风速传感器,风速传感器轴心的安装方向分别为X向,平行于飞行方向,即平行于水稻种植行方向;Y向,垂直于飞行方向,即垂直于水稻种植行方向;Z向,垂直于地面方向。X、Y向形成的平面与水稻冠层面水平,花粉的悬浮输送主要来自这2个方向的风力。每个采样节点在主机指令下,在指定时段同时捕获风速数据,然后分时无线传输至主机进行数据保存与处理,风速传感器单次最大采集时间为5 s。采用锂电池供电,单节点工作电压3.7~4.2 V,工作时间可持续10 h,田间工作温度25~75℃。
1.1.2机载北斗传感器
为适应小型无人机载重小的特点,基于高精度差分北斗UB351板卡设计了机载北斗定位系统(尺寸15 cm×9.8 cm×4.2 cm,总质量722 g),如图2所示。试验用的多旋翼无人机及北斗定位系统各参数如表1所示。

图2 无人机与机载北斗定位传感器Fig.2 Sensors of UAV and airborne Beidou positioning system
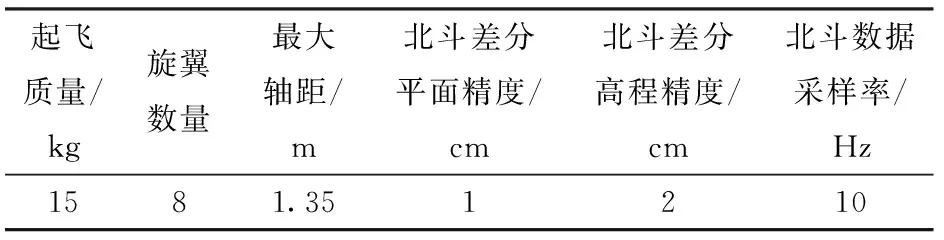
起飞质量/kg旋翼数量最大轴距/m北斗差分平面精度/cm北斗差分高程精度/cm北斗数据采样率/Hz1581.351210
1.1.3实时数据采集方法
无人机作业前,以人工方式依次将北斗天线中心点放置在风场参数无线传感器中心点,准确将地面节点的坐标传输给地面站。根据节点坐标在田间的分布形状,地面站通过位置规划(详见1.2.1节)计算出无线传感器网络的中心位置点P0。
如图3所示,D0、D1为已采集飞行轨迹分成的等时段距离;t0、t1分别对应D0、D1时段的结束时刻点,用以判断D0、D1时段是否可预测;ts为可预测时段内的计算状态起始点;P0为传感器区域节点的代表位置;Pr为无人机当前位置点;Tr为Pr到达P0的时间;tr为地面传感器的启动采集时刻;Tf为判断时间阈值(2.5 s);5 s为传感器网络采集时间段;Dm为起始点ts至Pr对应时刻的数据段,即可计算状态。无人机开始作业,携带北斗定位系统起飞后向采样区飞行。机载北斗系统按照指定采样率将无人机位置坐标实时传回地面站。根据采集坐标的轨迹,地面站通过状态预测算法判断无人机当前位置Pr到达P0的时间Tr,当Tr小于等于阈值Tf时,即达到无线传感器网络开始采集风速数据的准确时刻tr,确保3向风速最大值出现在采集时间段内。
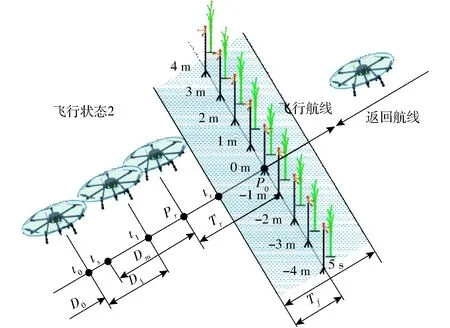
图3 无人机机-地传感器系统协同工作时段Fig.3 Cooperative working period of UAV sensor system
本文中风速传感器采集数据的时间段为5 s,将时间阈值Tf取为2.5 s,保证无人机在正反两个方向均有足够的预判时间。5 s后停止采集数据,并按照传感器编号顺序依次将数据发送给地面站存储和处理,该节点间隔时间为1.7 s,10个节点共需17 s。此时无人机已飞过传感器采集区。为提高作业效率,无人机不降落,在田间远离采样区悬停等待,节点数据发送完毕后,再次飞向采样区。
1.2 风速采集策略
1.2.1采集节点位置规划
田间风速采集区域风场具有整体性特点。其风场具有区域内方向和强度一致性的特点[20],采样节点分布形状具有规律性,适宜以某个网络中心点坐标代表区域内所有采样点坐标用以标定与无人机的实时相对位置。本文采用图3所示传感器网络分布形状,其中节点0 m位于无人机飞行轨迹上,-4 m~0 m节点与0 m~4 m对称分布在0 m节点两侧,呈现一条与飞行航线垂直的直线测量带,所有采样点同时开始采集,其目的为了获取无人机飞过该直线区域的风场分布数据。故采取节点0 m坐标位置作为整个区域节点的代表位置P0,用以标定无人机与采样区域的实时位置。
1.2.2无人机状态预测策略
如图3所示,无人机进入稳定飞行状态后,将已采集的飞行轨迹分成等时段距离(D0,D1,…)。在t0时刻根据该时刻的当前飞行时段轨迹D0判断当前飞行状态是否可预测(详见1.2.3节)。如果不可预测,则继续飞行一个等时段至下一个时刻点t1判断。形成无人机状态预测基于稳定状态的第1层机制保障。
假设D1距离段被判断为可预测,为了剔除掉D1距离段内速度起伏的不稳定阶段,需要进一步确定计算状态的起始点ts(详见1.2.4节),形成无人机状态预测基于稳定状态的第2层机制保障。此时无人机移动到当前位置点Pr,则可计算状态即为起始点ts至Pr对应时刻的数据段Dm,基于Dm采用状态预测算法预测未知时间Tr,准确预测出地面传感器的启动采集时刻tr。
考虑到无人机起飞后进入预期轨迹后经过采样区时段内机身姿态需保持平稳[21],基于稳定速度观测值,采用最小二乘法的曲线拟合方式可对采样区间速度进行较准确预测。
1.2.3无人机状态可预测性
根据观测值对无人机状态进行预测的前提是明确无人机的运行状态。农用无人机作业过程分为几个显著不同的系统状态:①是无人机从地面起飞调整姿态准备进入航线以及从航线中改出并降落至地面的状态(状态1),该状态根据无人机起飞位置、方向、机身姿态的不同需要完全不同的矢量加速度来改变状态[22],特别是目前绝大部分无人机的起降仍然难以脱离人工的操控,难以进行预测。②无人机进入预定航线,飞过指定采样区域的状态(状态2),该状态下无人机姿态平稳,系统具有常速或者恒加速度的特征,观测数值可作为典型的离散线性系统的输入值[23],该状态飞行参数稳定,变动小,无需人工干涉,可以进行预测。③无人机在田间指定区域悬停并调整姿态更改航线的状态(状态3),该状态类似于状态1,姿态变动剧烈,特别在悬停时易受到人工及外部风力的影响,状态同样较难预测。
对于可预测的状态2,需要对已经获取的状态观测数据进行实时评估,从状态测量值中计算出实时飞行速度和飞行加速度,只有当前飞行速度及飞行加速度变化值处于合理范围才能进行状态预测。采用Simulink中的离散微分模块对实时测量时间与已飞行距离建模仿真[24],可得到实时速度与实时加速度。飞行参数评估模型如图4所示。
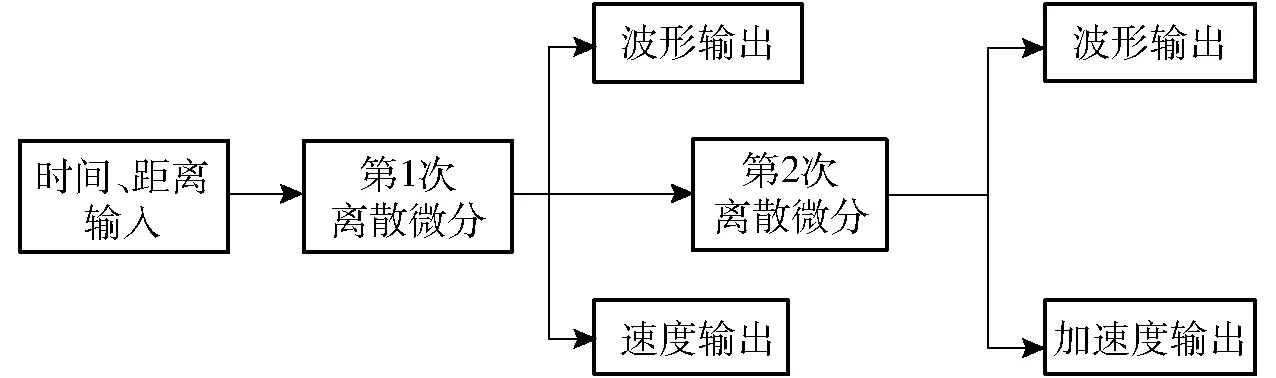
图4 飞行参数评估模型Fig.4 Flight parameters evaluation model
提取无人机采样飞行状态2开始采样前的一段飞行距离数据D1输入到评估模型中,其中数据输入模块中的系统输入时间参数与系统输入距离参数取自北斗定位系统的实时测量值,数据如表2所示。

表2 D1段计算参数Tab.2 Calculated parameters of D1
模型中两个离散微分模块参数保持一致,分别解算出飞行速度与加速度。设置时,增益值(Gain value)为1.0,初始输入条件Ku/Ts为零。模型求解出的飞行速度与飞行距离关系如图5所示,求解出的飞行加速度与飞行距离关系如图6所示,同时求解的系统输出速度与输出加速度如表2所示。
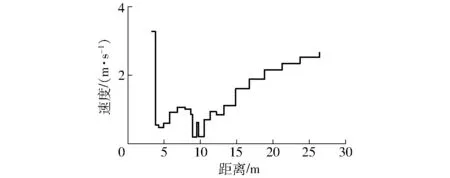
图5 速度与距离关系Fig.5 Relationship between speed and distance
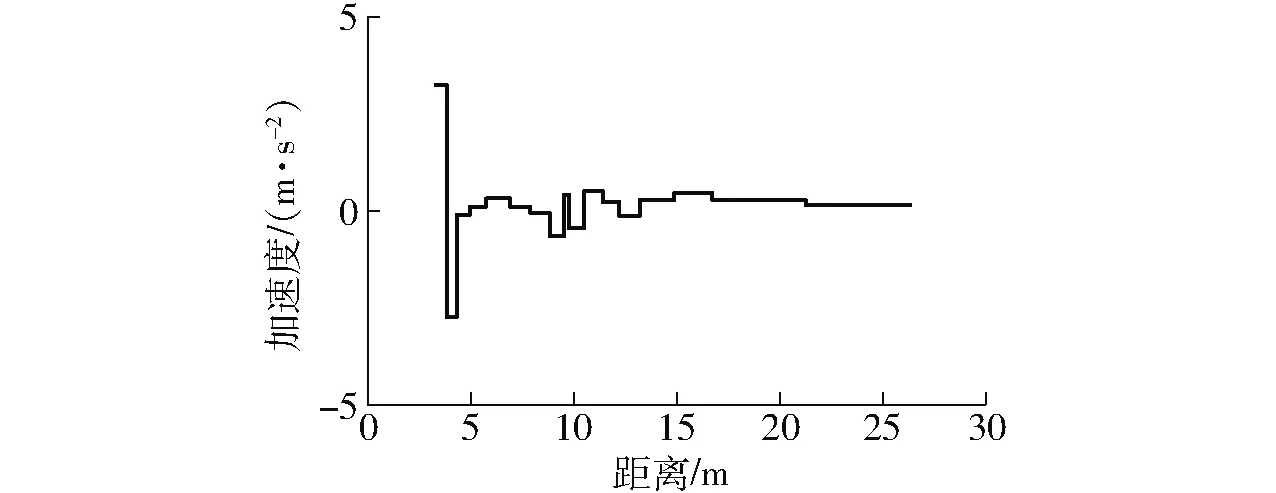
图6 加速度与距离关系Fig.6 Relationship between acceleration and distance
图5中第0点到第1点的变化剧烈是因为系统输入时间值必须从零开始设置积分的原因,除此之外其余各点之间的速度变化连续,从第1点至第12点飞行速度基本维持在0.5 m/s左右,从第12点开始到第20点飞行速度逐步增大。
同图5原因,图6中第1点出现的剧烈变化不予考虑。从第2点开始至第20点,加速度的变化幅度不超过0.5 m/s2,且从第12点开始均值大于零,曲线出现明显的收敛趋势,说明该段状态无人机速度平稳增长,具有恒加速度的特征,状态可预测。
对于本文无人机采集风速的作业方案,无人机只需沿直线飞行,理想飞行状态只需单一加速度存在,对表2加速度数列曲线的收敛性进行判断,若曲线收敛即可判知无人机状态可预测,否则不可预测。飞行距离数据D1的加速度曲线采用有理函数计算,收敛值为
(1)
式中有理参数统计为:和方差(Sum of squares error,SSE)为1.577;决定系数为0.92;判定系数为0.9;均方根误差为 0.313 9。
参数中SSE与RMSE较小,决定系数与判定系数接近于1,说明该函数能较好对D1进行进一步收敛计算。对式(1)进行收敛计算,该函数明确收敛于x2项的系数0.189 5。
无人机状态可预测性仍然需要进一步确定可计算状态的起始点ts,起始点到当前点Pr的无人机观测数据Dm用以拟合计算,进而准确预测出无人机距离采样区域代表位置P0的时间Tr。
1.2.4无人机可计算状态的起始点ts的确定
为精确地拟合出无人机运动状态,一方面计算数据需要包含尽量多的观测数据,另一方面需要尽量剔除非单一外加速度作用的数据。对飞行距离D1而言,要实现尽量剔除非单一外加速度的作用,只需对无人机飞行速度的凹凸性拐点进行判别即可,最后一个拐点即为可计算状态的起始点。但为了达到包含尽量多的观测数据的目的,则需进一步对极点处的曲率进行判断,若该极点处的曲率未超过阈值,则忽略该极点,直到找到曲率超过阈值的拐点即为无人机可计算状态的起始点。
设表2中飞行速度离散数组为s,则曲率为
(2)
式中cur——s离散数组的各点曲率
将s用连续曲线连接后如图7所示。本文中考虑到无人机采集风速的作业方案,无人机只需沿直线飞行,速度变化不大,曲率阈值Qf取为表2中第9点最大曲率0.045 3 m-1(同图5原因,忽略第2点曲率)的一半0.022 6 m-1。图7中距离当前点(第20点)最近的拐点为第13点,第13点处的曲率为0.015 5 m-1,小于阈值Qf。继续寻找其次近的拐点第12点的曲率为0.013 5 m-1,仍然小于阈值Qf。直到追溯到第10拐点的曲率为0.037 7 m-1,大于阈值Qf,此时可将第10点作为无人机可计算状态的起始点ts,同时第10点至第20点的数据包含了10 s内的飞行状态,足够用以预测无人机的飞行状态。
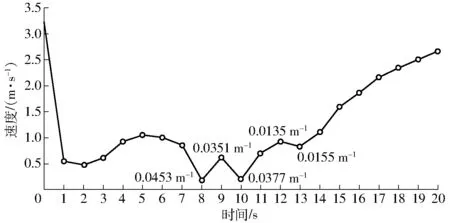
图7 实时连续速度Fig.7 Real-time consecutive speed
1.2.5无人机状态预测算法
综上所述,获取北斗实时观测值,将原始数据包转换为直角坐标参数,并与时间量一起作为离散线性系统输入量,建立飞行参数评估模型。对系统目前状态的可预测性进行评估后,基于数据完备性和尽量保持外加速度单一的准则下找到无人机现有观测值中的可计算状态数列,然后基于最小二乘法采用曲线拟合方式对无人机状态进行准确预测,计算出地面站传感器的采集时刻tr协同工作。地面站设计的状态预测算法流程图如图8所示。
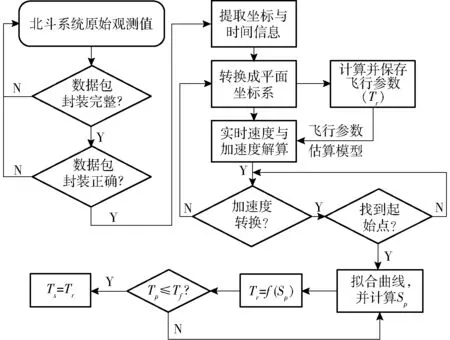
图8 状态预测算法流程图Fig.8 State prediction algorithm
2 结果与讨论
2.1 无人机状态预测结果
由已知飞行距离D1依据算法预测未知状态Tr。由1.2.4节可知,图 7中对D1距离进行计算的有效采样点是第10点到第20点,基于最小二乘法对该段数据Dm进行拟合,该段曲线曲率小,变化平缓,另外考虑到解算的实时性,对选择的拟合方式要求准确且计算量小,选择傅里叶1阶(Fourier-1)拟合与多项式2阶(Polynomial-2)拟合做比较,其中傅里叶1阶拟合公式为
f(x)=252-242.2cos(0.032 82x)+
11.56sin(0.032 82x)
(3)
多项式2阶拟合公式为
f(x)=0.127 4x2+0.393 8x+9.845
(4)
两种拟合方式的拟合优度参数如表3所示。

表3 两种拟合方式优度比较Tab.3 Comparison of indexes of two fitting methods
由表3中可看出,两种拟合方式均能很好对Dm准确描述,拟合优度相差无几,但多项式2阶拟合的方程系数比傅里叶1阶拟合要少。考虑到算法实现的简洁与高效,选择多项式2阶拟合作为拟合方式,式(4)也就是本次计算示例的具体表达形式。
利用式(4)对采样后10 s(21~30 s)的数据进行预测,预测数据与随后由北斗定位系统实际获取的数据如表4所示。
对预测数据与实际数据进行F检测,假设两组数据无显著差异,在可置信度为99%水平时,无差异的概率P值为0.956,H为零接受原假设,进一步统计计算相关性,相似度系数为0.998,可见利用状态预测算法对无人机在状态2下可做出较准确的距离预测。
2.2 地面传感器风速最大值采样结果
风速最大值代表了所采集无人机风场在单个方向出现最大强度,风速最大值的出现时刻则代表了无人机风场作用在水稻冠层最有效的时间点,具有重要的物理意义。
单个数据样本的风速属于连续变量,在不考虑其他因素的影响下,风速最大值出现时刻理论上应该处于无人机飞过采样传感器上方,即如果采样时刻预测准确,在阈值为2.5 s,采样时间持续5 s的情况下,风速最大值出现时刻也应该是2.5 s。

表4 Tr预测值与实际测量值Tab.4 Predicted data and actual data of Tr
但考虑到影响风速最大值出现时刻的因素有一些难以衡量的因素,如自然风经常改变风向,水稻冠层参数参次不齐(密度、高度、植株柔韧性),无人机在预测状态内受外加速度作用改变姿态等,风速最大值出现的理论时刻不会聚焦在2.5 s,应分布在5 s采样时段的某个区域内。特别当本文的无人机状态预测算法体现出作用时,风速最大值出现时刻的分布应该聚集在一段较小的时间段内。
为验证无人机状态预测算法的可靠性,项目组于2016年8月17日在湖南武冈杂交水稻基地按照算法进行了机-地传感器系统协同风速采集试验,试验有效采集了11组有效数据,对每组数据分别计算X向、Y向和Z向风速最大值在5 s内出现的时刻,如表5所示。用以评价机-地传感器系统协同采集方法对风速有效值获取时刻的预测准确性。
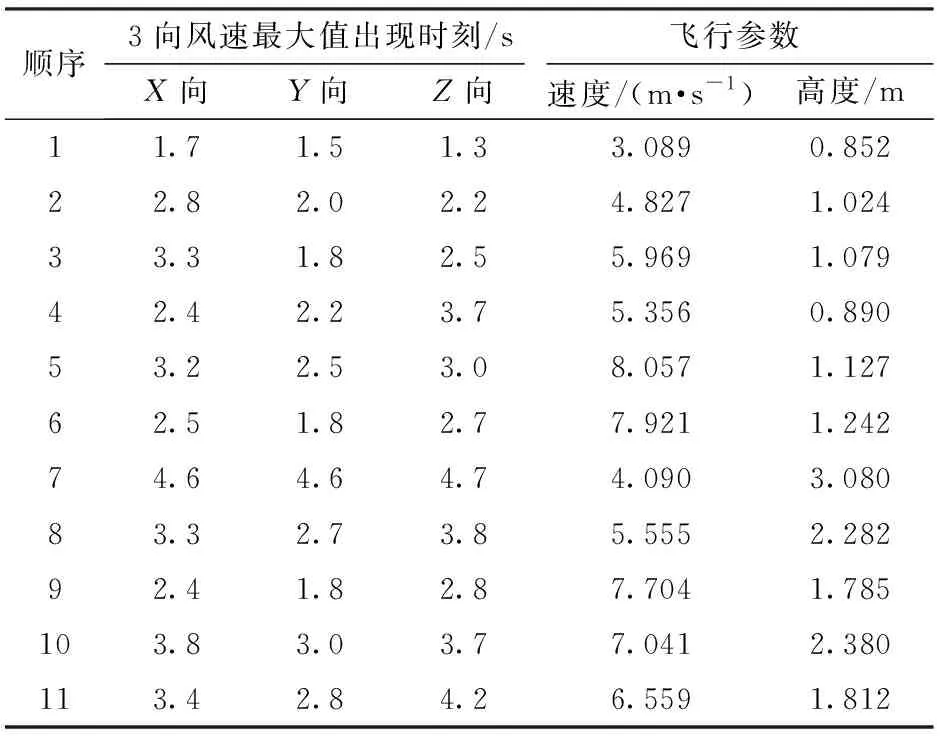
表5 风速最大值出现时刻Tab.5 Occurrence time of maximum wind speed
由表5中可看出,11组采样数据的3向风速最大值均出现在5 s以内,最大值成功采集率为100%。而2015年8月在同样地点,同样方式下项目组未采用预测算法,直接用人工目视判断采样时刻的最大值成功采集率仅有63%,两者对比证明飞行状态预测算法对采集时刻的预测在5 s范畴内可靠有效。
2.3 协同采样时刻统计规律分析
3向风速最大值出现时刻具有一定的统计规律。
首先是3种方向风速最大值出现时刻具有一致性,每个样本3种方向风速最大值出现的时刻相差不超过1.5 s。将影响风速最大值出现时刻的所有因素综合为一个单因素,对3向样本数据做方差分析,检验总体均值是否相等,每个样本作为1个水平,给定显著性水平为0.05,计算方差如表6所示。
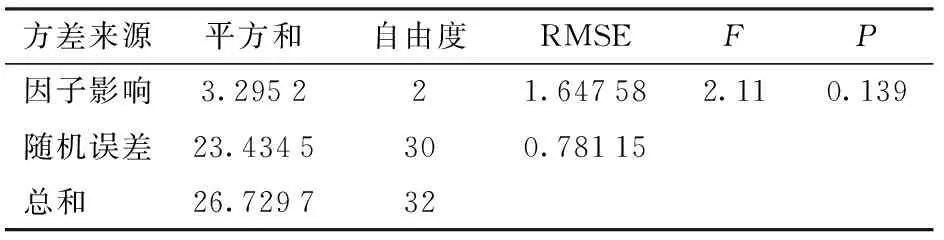
表6 计算方差Tab.6 One-way analysis of variances
由表6可知,P值为0.139,大于显著性水平0.05,接受总体均值相等假设,可认为3向风速最大值出现时刻总体没有显著区别,3个方向的风速强度变化具有时间一致性。
其次,X、Y、Z方向风速最大值出现时刻标准差分别为0.79、0.87、0.98 s,表5中X、Y、Z方向风速最大值出现时刻均值分别为3.036、2.427、3.145 s,3向风速最大值出现时刻与各自均值的偏离程度不足1 s,说明3向风速最大值出现时刻在5 s采样范围内具有较明显的区域性。且X向集中在2.5~3.5 s区域内,Y向集中在1.7~2.7 s区域内,Z向集中在2.5~3.5 s区域内,这与2.2节理论分析的结论“风速最大值出现时刻的分布应该聚集在一段较小的时间段内”保持一致,同时证明了无人机状态预测算法的准确性。
最后是Y向风速最大值出现时刻总体来看明显滞后于X向与Z向,X向与Z向则没有明显区别。这是由传感器网络布置的位置及冠层风场方向造成的,在无人机飞行方向上,Y向叶轮位置较X向与Z向靠后,X向与Z向叶轮位置平行。Y向风速方向与无人机飞行方向垂直,风力沿水稻冠层散布时会出现时滞。
3 结论
(1)无人机田间作业飞行状态在单一加速度状态下具有可预测性,且能确定可计算状态的起始点位置,用以实时预测地面风速传感器工作时间点,协同无人机飞行状态同步采样。
(2)采用本文的状态评估与预测方法,无人机田间作业时飞行状态预测数据与实际观测数据在可置信度为99%水平时,无差异的概率P值为0.956,相似度系数为0.998,可以做出较准确的评估与预测。
(3)采集3向风速最大值出现时刻具有一致性的假设在可置信度为95%的水平时,总体均值相等的概率为0.139,没有显著差别。X、Y、Z向风速最大值出现时刻标准差分别为0.79、0.87、0.98 s,说明3向风速最大值出现时刻在5 s采样范围内具有较明显的区域性,验证了系统采样时刻的准确性。
1 薛新宇, 兰玉彬. 美国农业航空技术现状和发展趋势分析[J/OL]. 农业机械学报, 2013, 44(5):194-201.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20130534&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.05.034.
XUE Xinyu, LAN Yubin. Agricultural aviation application in USA [J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2013,44(5): 194-201.(in Chinese)
2 何勇, 张艳超. 农用无人机现状与发展趋势[J]. 现代农机, 2014(1):1-5.
HE Yong, ZHANG Yanchao. Status quo and development trends of agricultural UAVs[J]. Modern Agricultural Machinery, 2014(1): 1-5. (in Chinese)
3 周志艳, 臧英, 罗锡文,等. 中国农业航空植保产业技术创新发展战略[J]. 农业工程学报, 2013, 29(24):1-10.
ZHOU Zhiyan, ZANG Ying, LUO Xiwen, et al. Technology innovation development strategy on agricultural aviation industry for plant protection in China[J]. Transactions of the CSAE, 2013,29(24): 1-10. (in Chinese)
4 彭向阳, 陈驰, 饶章权,等. 基于无人机多传感器数据采集的电力线路安全巡检及智能诊断[J]. 高电压技术, 2015, 41(1):159-166.
PENG X Y, CHEN C, RAO Z Q, et al. Safety inspection and intelligent diagnosis of transmission line based on unmanned helicopter of multi sensor data acquisition[J]. High Voltage Engineering, 2015, 41(1):159-166. (in Chinese)
5 戴春亮, 时晨光, 周建江,等. 基于无源传感器协同的机载雷达自适应辐射控制算法[J]. 数据采集与处理, 2016, 31(4):746-753.
6 路志伟, 李明, 季晓光. 基于传感器协同技术的雷达搜索空域研究[J]. 航空计算技术, 2006, 36(5):5-8.
LU Zhiwei, LI Ming, JI Xiaoguang. Research on radar searching volume based on mutil-sensor cooperation technology[J]. Aeronautical Computing Technique, 2006,31(5):5-8. (in Chinese)
7 JIN Y, MINAI A A, POLYCARPOU M M. Cooperative real-time search and task allocation in UAV teams[C]∥Proceedings of the 42nd IEEE Conference on Decision and Control, 2003,1:7-12.
8 GROCHOLSKY B, KELLER J, KUMAR V, et al. Cooperative air and ground surveillance[J]. Robotics & Automation Magazine IEEE, 2006, 13(3):16-25.
9 ERMAN A T, HOESEL L V, HAVINGA P, et al. Enabling mobility in heterogeneous wireless sensor networks cooperating with UAVs for mission-critical management[J]. IEEE Wireless Communications, 2008, 15(6):38-46.
10 OLLERO A, MARRON P J, BERNARD M, et al. Aware: platform for autonomous self-deploying and operation of wireless sensor-actuator networks cooperating with unmanned AeRial vehiclEs[C]∥IEEE International Workshop on Safety, Security and Rescue Robotics, 2007:1-6.
11 林蔚红, 孙雪钢, 刘飞,等. 我国农用航空植保发展现状和趋势[J]. 农业装备技术, 2014(1):6-11.
LIN Weihong, SUN Xuegang, LIU Fei, et al. Status quo and development trend of agricultural aviation in plant protection in China[J]. Agricultural Equipment & Technology, 2014(1): 6-11. (in Chinese)
12 高圆圆, 张玉涛, 赵酉城,等. 小型无人机低空喷洒在玉米田的雾滴沉积分布及对玉米螟的防治效果初探[J]. 植物保护, 2013, 39(2):152-157.
GAO Yuanyuan, ZHANG Yutao, ZHAO Youcheng, et al. Primary studies on spray droplet distribution and control effects of aerial spraying using unmanned aerial vehicle (UAV) against the corn borer[J]. Plant Protection, 2013,39(2): 152-157. (in Chinese)
13 薛新宇, 屠康, 兰玉彬,等. 无人机高浓度施药对水稻品质的影响[J/OL]. 农业机械学报,2013, 44(12):94-98.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20131216&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.12.016.
XUE Xinyu, TU Kang, LAN Yubin, et al. Effects of pesticides aerial applications on rice quality[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013,44(12): 94-98. (in Chinese)
14 李继宇, 周志艳, 胡炼,等. 单旋翼电动无人直升机辅助授粉作业参数优选[J]. 农业工程学报, 2014, 30(10):10-17.
LI Jiyu, ZHOU Zhiyan, HU Lian, et al. Optimization of operation parameters for supplementary pollination in hybrid rice breeding using uniaxial single-rotor electric unmanned helicopter [J]. Transactions of the CSAE,2014,30(10): 10-17. (in Chinese)
15 李继宇, 周志艳, 胡炼,等. 圆形多轴多旋翼电动无人机辅助授粉作业参数优选[J]. 农业工程学报, 2014, 30(11):1-9.
LI Jiyu, ZHOU Zhiyan, HU Lian, et al. Optimization of operation parameters for supplementary pollination in hybrid rice breeding using round multi-axis multi-rotor electric unmanned helicopter [J]. Transactions of the CSAE, 2014,30(11): 1-9. (in Chinese)
16 JAIMES A, KOTA S, GOMEZ J. An approach to surveillance an area using swarm of fixed wing and quad-rotor unmanned aerial vehicles UAV(s)[C]∥IEEE International Conference on System of Systems Engineering, 2008:1-6.
17 MATIC G, JANKOVEC M, JURMAN D, et al. Feasibility study of attitude determination for all-rotating unmanned aerial vehicles in steady flight[J]. Journal of Intelligent & Robotic Systems, 2015, 80(2): 341-360.
18 SCHLIPF D, GRAU P, RAACH S, et al. Comparison of linear and nonlinear model predictive control of wind turbines using LIDAR[C]∥American Control Conference, IEEE, 2012:3050-3055.
19 LARRABEE T, CHAO H, RHUDY M, et al. Wind field estimation in UAV formation flight[C]∥American Control Conference, IEEE, 2014:5408-5413.
20 SHAO P, WU C, MA S, et al. Research on key problems in assigned-point recovery of UAV using parachute[C]∥Tencon 2013—2013 IEEE Region 10 Conference, IEEE, 2014:1-4.
21 NO H, CHO A, KEE C. Attitude estimation method for small UAV under accelerative environment[J]. GPS Solutions, 2015, 19(3): 343-355.
22 ZHANG X, XIAN B, ZHAO B, et al. Autonomous flight control of a Nano quadrotor helicopter in a GPS-Denied environment using on-board vision[J]. IEEE Transactions on Industrial Electronics, 2015, 62(10): 6392-6403.
23 STOLLE S, RYSDYK R. Flight path following guidance for unmanned air vehicles with pan-tilt camera for target observation[C]∥IEEE Digital Avionics Systems Conference, Dasc’03, 2003,2:8.B.3-81-12.
24 PAN C J, GUO Y Q. Design and simulation of ex-range gliding wing of high altitude air-launched autonomous underwater vehicles based on Simulink[J]. Chinese Journal of Aeronautics, 2013, 26(2): 319-325.
