抛扬式膜际覆土马铃薯播种联合作业机设计与试验
2018-07-05石林榕杨小平赵武云李荣斌孙步功
石林榕 杨小平 赵武云 孙 伟 李荣斌 孙步功
(1.甘肃农业大学机电工程学院, 兰州 730070; 2.酒泉市铸陇机械制造有限责任公司, 酒泉 735000)
0 引言
甘肃省为马铃薯重要的主产区,种植面积逐年增加,但机械化作业水平较低[1-3]。垄作覆膜种植为甘肃的主要栽培模式,尤其宽垄双行铺膜种植机应用广泛,效益较高[4]。
国外没有针对地膜覆盖技术的马铃薯播种机,且现有机型价格昂贵、维修耗时长[5];国内学者根据不同地域马铃薯种植农艺研制出1220B型宽垄双行马铃薯联合作业机[6]、2CM-4型马铃薯播种施肥联合作业机[7]、2CM-2型马铃薯播种机[8]、2CMG-4 型马铃薯播种施肥联合作业机[9]、小型多功能马铃薯种植机[10]等,以上研究表明马铃薯宽垄种植模式较传统种植模式优势明显。
针对甘肃省地膜覆盖大垄双行种植农艺模式,本文设计抛扬式膜际覆土马铃薯播种联合作业机。依据连杆原理确定仿形架的开沟器安装尺寸;研究种勺结构对取种率的影响;借助EDEM软件进行链勺不同最大直径、深度条件下对单种合格指数、漏播指数和重播指数影响的研究,并优选出取种性能较优的链勺尺寸,以期为甘肃省垄作地膜覆盖马铃薯种植提供针对性较强的机型。
1 整机结构与工作原理
1.1 整机结构
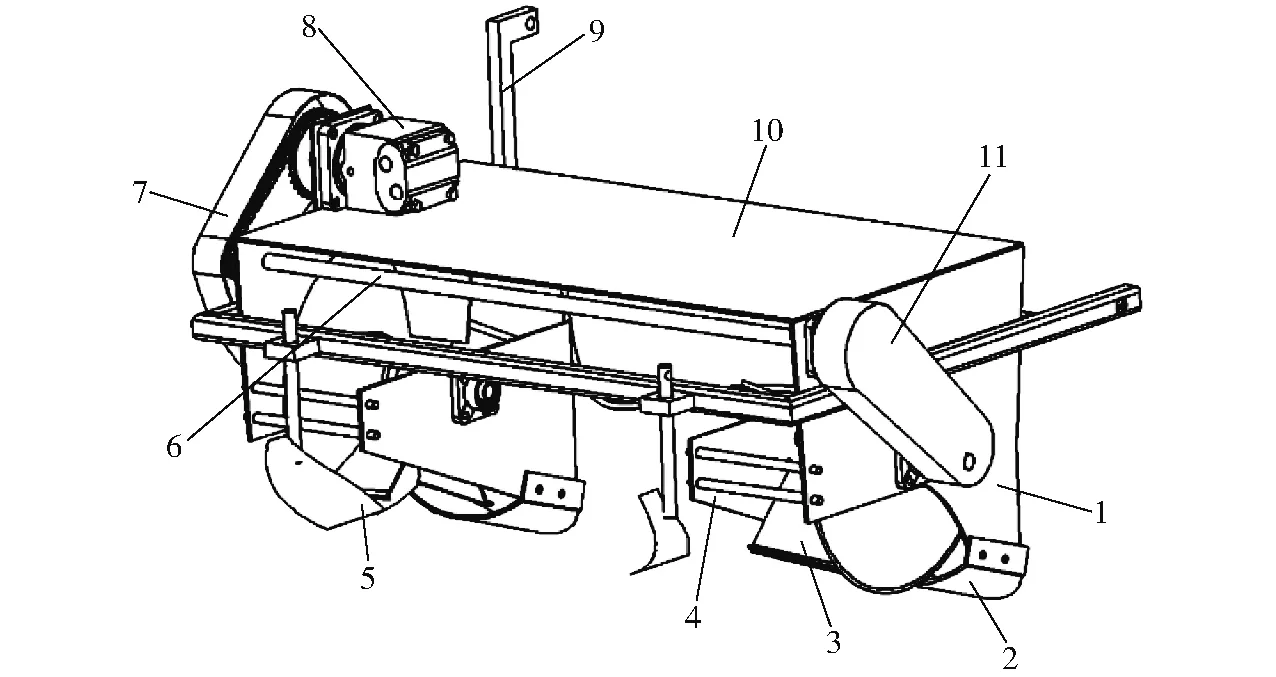
如图1所示,抛扬式膜际覆土马铃薯播种联合作业机主要由主架、仿形架、旋耕装置、排肥装置、排种装置、尾架、抛扬式覆土装置等组成。其中,排种主要由链勺式排种装置等完成;覆膜过程主要由膜架、压膜杆等完成;膜际覆土主要由抛扬式覆土装置、覆土铲等完成。整机以三点悬挂方式与拖拉机联接。
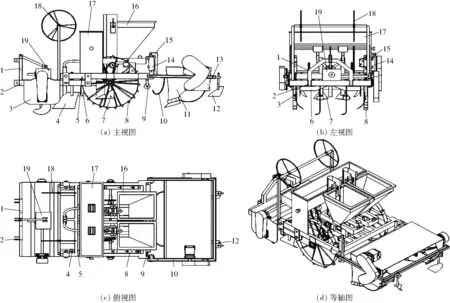
图1 抛扬式膜际覆土马铃薯播种联合作业机结构图Fig.1 Structure diagrams of throwing and covering soil on film edge of potato combine seeder1.悬挂架 2.主架 3.旋耕装置 4.起垄犁 5.仿形架 6.垄体整形板 7.开沟器 8.地轮 9.膜架 10.压膜杆 11.抛扬式覆土装置 12.覆土铲 13.尾架 14.液压油缸 15.升降架 16.链勺式排种装置 17.排肥装置 18.铺管架 19.减速箱
1.2 机械种植农艺
抛扬式膜际覆土马铃薯播种联合作业机机械化播种农艺作业过程如图2所示。甘肃省河西走廊马铃薯种植农艺为:垄宽700 mm,垄高280 mm,垄距1 200 mm,种植行距400 mm,根据当地土质和降雨量,播种深度范围为80~140 mm;膜际覆土量范围为30~50 mm。马铃薯机械化播种具体作业过程如图2a所示:先由旋耕装置的旋耕刀片将地面分为相间的层土区和碎土区,其中1号层土区用于支撑垄型,2号碎土区用于投放种薯,3号碎土区用于起垄。图2b为排肥装置在中间层土区施基肥、起垄犁起垄、垄体整形板优化垄型、排种开沟器开沟和排种、覆膜,同时,3号碎土区保留一部分碎土用于膜际覆土;如图2c所示,对地膜覆盖垄型进行膜际覆土。
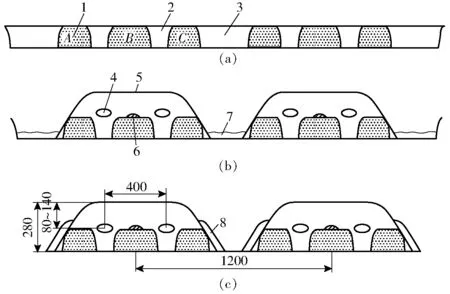
图2 马铃薯播种联合作业机农艺作业过程Fig.2 Agronomic processes of potato combine seeder1.层土 2.碎土 3.垄沟第1层碎土 4.马铃薯 5.地膜 6.基肥 7.垄沟第2层碎土 8.膜际覆土
1.3 工作原理
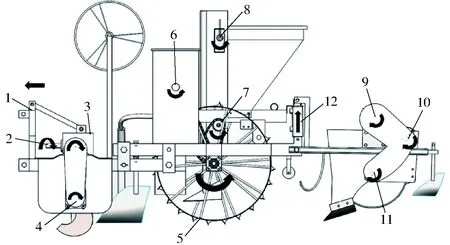
图3 马铃薯播种联合作业机运动传递过程Fig.3 Movement process of potato combine seeder1.三点悬挂架 2.动力输入轴 3.变速箱 4.旋耕刀轴 5.地轮 6.排肥轮轴 7.勺链排种器动力输入轴 8.勺链排种器传动轴 9.液压马达 10.动力传递轴 11.抛扬叶轮轴 12.液压缸
如图1~3所示,作业时,拖拉机牵引整机以一定的速度前行。同时拖拉机动力输出轴通过变速箱将动力传递至旋耕刀轴,在旋耕装置作用下将地分为层土区和碎土区,如图2a所示;安装在仿形架上的地轮在土壤摩擦力作用下旋转,分别带动排肥装置和链勺式排种装置,排肥过程稍前于起垄过程,并施基肥于层土B区,其后起垄犁起垄和垄体整形板整型;同时,两套链勺式排种装置将马铃薯通过排种开沟器按一定株距交叉投放于碎土区。播种地膜在压膜架的作用下铺放于垄面,此时,层土区A、C两侧碎土区还存在一定量的碎土,如图2b所示;拖拉机液压系统驱动液压马达,带动抛扬式覆土装置进行二次碎土和覆土作业,如图2c所示。
1.4 主要技术指标
抛扬式膜际覆土马铃薯播种联合作业机主要技术参数如表1所示。
2 关键部件设计
2.1 机架
2.1.1机架组成
传统马铃薯联合作业机机架属于一体[11-12],马
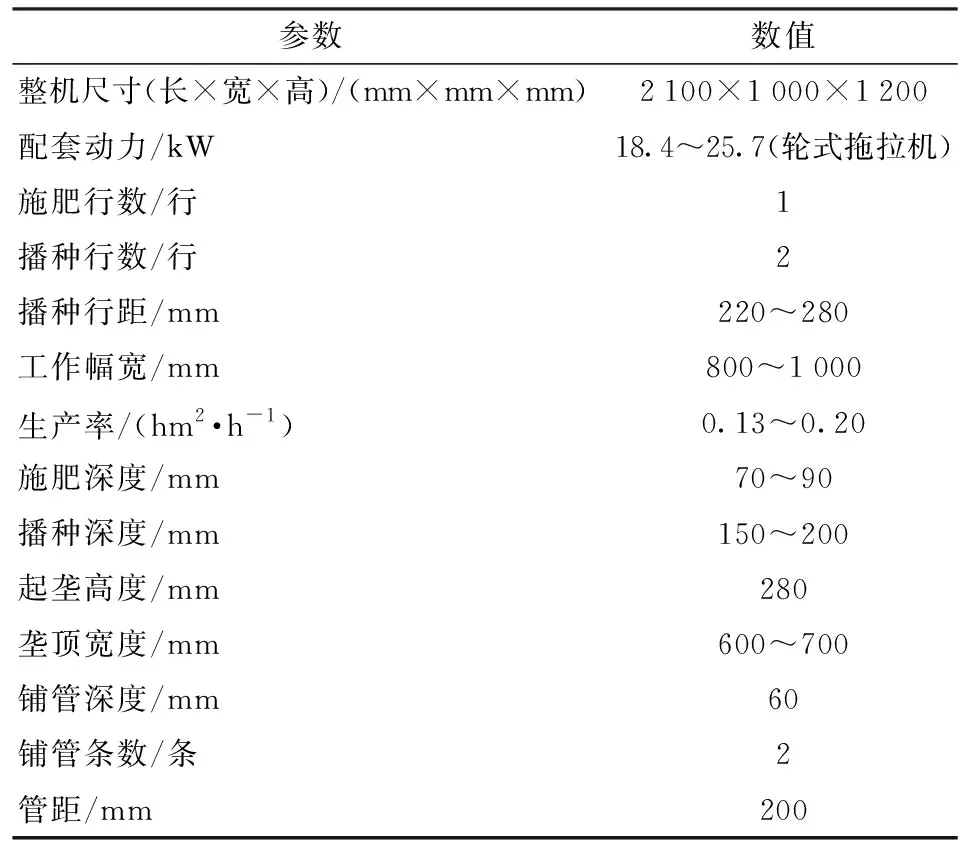
表1 马铃薯播种联合作业机主要技术参数Tab.1 Main technical parameters of potato combine seeder
铃薯播深一致性较差;由于机体较长,运输过程中容易发生侧翻。为避免以上问题出现,本文设计的机架主要由主架、仿形架和尾架等组成(图4)。主架用于安装旋耕装置,通过三点悬挂机构调节作业深度。仿形架用于安装排肥装置和播种装置,与主架通过铰接连接,仿形能保证马铃薯播深一致性;尾架用于安装抛扬式覆土装置,与仿形架铰接,可通过液压油缸作用升降覆土装置,方便运输。
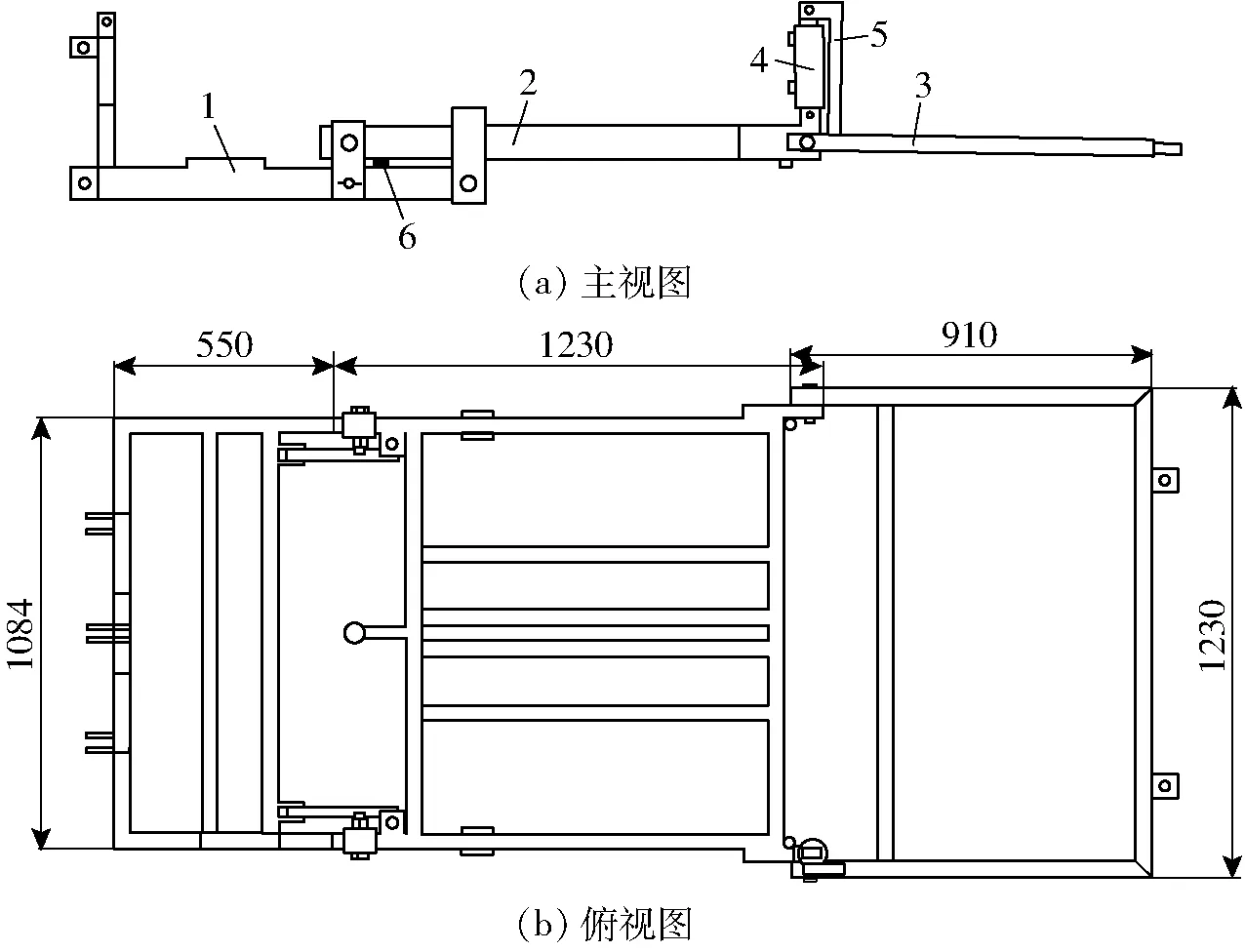
图4 机架结构图Fig.4 Structure diagrams of frame1.主架 2.仿形架 3.尾架 4.液压油缸 5.顶架 6.压簧
2.1.2地轮安装尺寸确定
开沟器与地轮在与土壤发生接触的过程中保持稳定,根据连杆原理分析可将仿形架仿形过程简化为曲柄滑块机构,开沟器受到的土壤及自身重力扭矩与土壤对地轮向上的扭矩平衡。
对图5b分析可知,矢量方程为
lOC=lOA+lAC
(1)
lOD=lOB+lBD
(2)
由式(1)、(2)可知A、C、D点坐标为
(3)
(4)
(5)
式中l3——开沟器与铰接点O间的安装距离,mm
R——地轮半径,mm
l1——杆1长度,mm
α——杆1与x轴正向间的角度,(°)
β——杆2与x轴正向间的角度,(°)
θ——杆1与杆3间的夹角,(°)
由图5b分析可知,杆2与水平线间的角度β始终为270°,因此式(4)可简化为
(6)
为了使地轮与开沟器仿形量同步,C、D点y方向速度应相等,可得
l1cosα=l3cos(α-θ)
(7)
由式(7)可知,开沟器与地轮水平方向离O点安装长度应相等,但地轮随地面起伏与O点水平距离时刻发生变化,本机将开沟器安装于地轮轴上来解决该问题。已知h2=90 mm、R=375 mm,根据马铃薯机械化种植农艺要求,种植深度按110 mm计算可得开沟器安装高度为h1=295 mm,轮轴与O点的距离应大于地轮半径,通过直角三角形边长公式计算可知l1>364 mm,最终取l1为400 mm。
2.2 链勺式排种装置
2.2.1排种装置结构
链勺式排种器是目前马铃薯播种机应用较广泛的作业部件。联合作业机选取的链勺式排种装置结构由种箱、链轮、链、张紧调节杆、防落板、链勺和导种管等组成,如图6a所示。马铃薯种薯链勺式排种装置使用链条带动取种勺从种箱中舀取种薯,链条回转将种薯运至开沟器处进行排种。为便于观察,减少仿真时间,删除与排种过程无关的部件,应用Solidworks软件对马铃薯种薯排种装置简图进行建模,以.mesh格式导入EDEM软件,仿真简图如图6b所示。
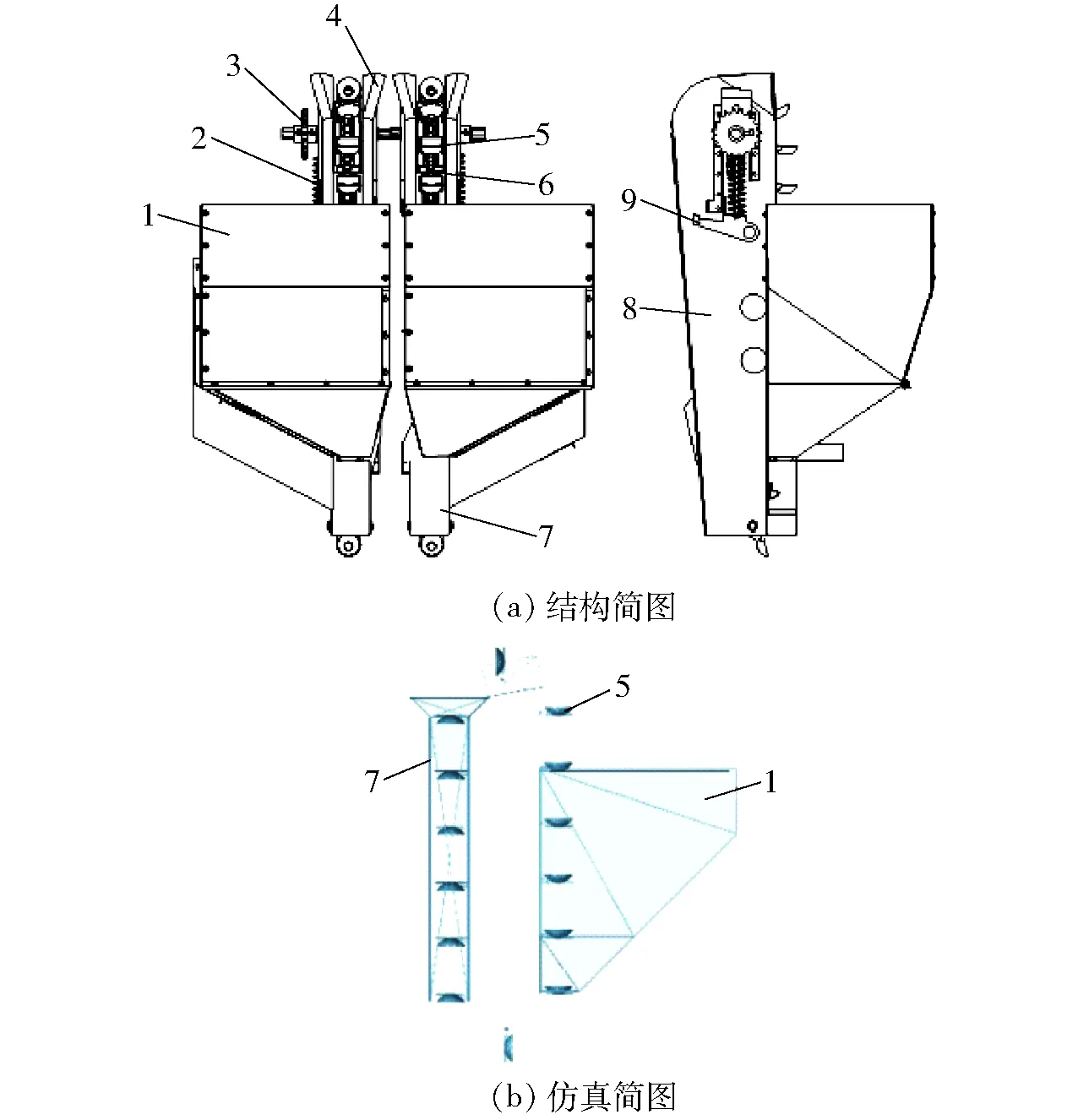
图6 链勺式排种装置Fig.6 Structure diagrams of chain-spoon potato metering device1.种箱 2.传动张紧弹簧 3.链轮 4.防落板 5.链勺 6.链7.导种管 8.安装座 9.张紧调节杆
2.2.2种勺尺寸优化确定
链勺式排种装置的取种性能直接影响马铃薯播种机的播种质量,种勺基本尺寸对链勺式排种装置的取种率有重要影响[13]。种勺直径取决于种薯长度,深度取决于种薯厚度,为了增加充种稳定性,种勺深度小于种薯厚度的0.5倍[14-15],选取“新大坪”整薯200个,长、宽、厚统计平均值范围为64.5~89.5 mm、74~53.5 mm、42.5~63 mm。通过对马铃薯统计长和厚区间取平均,链勺上开口直径D、深度H初值分别设为77、26.5 mm。链勺基本尺寸如图7所示。为了优选链勺基本尺寸,借助EDEM软件进行链勺不同最大直径D、深度H条件下对单种合格指数、漏播指数和重播指数影响的研究,并以单种合格指数为重点考察指标,兼顾漏播指数和重播指数,优选出种勺结构参数。
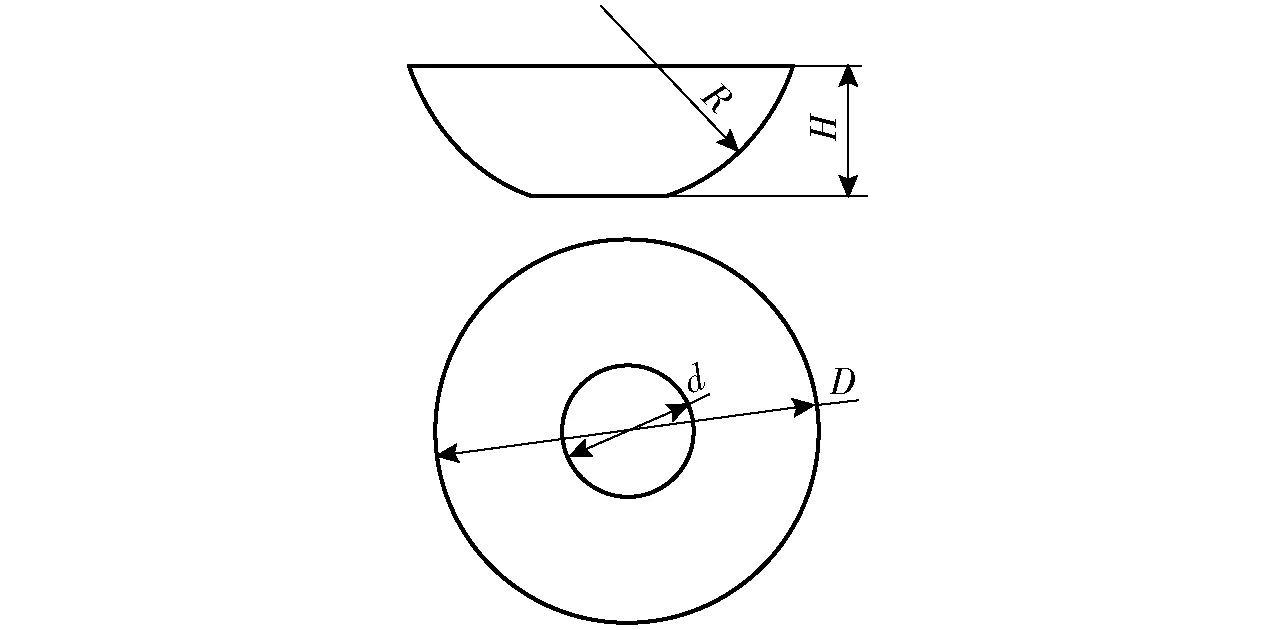
图7 链勺基本尺寸Fig.7 Basic sizes of spoons
2.2.2.1种薯模型
挑选球形、椭球形和不规则形3种类型统计平均值接近的种薯分别进行建模。具体建模过程为:将种薯沿最大轮廓切开,将切面与白纸贴合,用铅笔
将轮廓描出;再将马铃薯沿宽度方向切片,根据马铃薯切片方向曲率确定切片厚度,曲率决定切片薄厚,切片厚度基本范围为10~20 mm,并将每片轮廓描出,将全部马铃薯切片的轮廓线自顶向下的顺序导入Solidworks,采用放样命令进行马铃薯建模,将马铃薯三维模型以.mesh格式导入EDEM软件中对马铃薯模型进行颗粒填充,马铃薯离散元模型如图8所示。马铃薯填充颗粒信息如表2所示。

图8 马铃薯离散元模型Fig.8 Discrete element model of potato

表2 马铃薯填充颗粒信息Tab.2 Information of potato filling particles
2.2.2.2仿真过程
种薯仿真所需参数如表3所示。
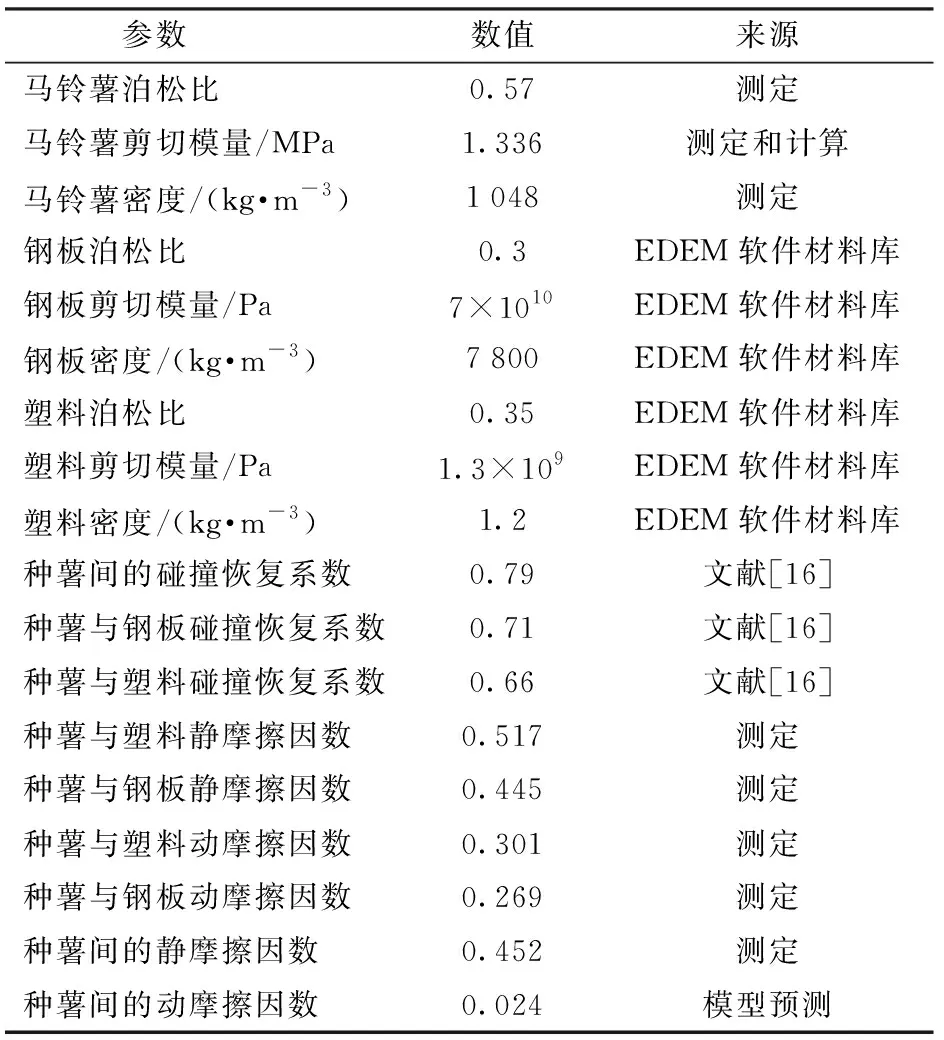
表3 种薯基本力学和接触力学参数Tab.3 Physical and contact parameters of potato
仿真模型所选相关参数最大程度与实际条件保持一致,根据前进速度0.69 m/s和河西马铃薯种植穴距130 mm,链勺间距为113 mm,参考文献[13]可得
v1=vl/L
(8)
式中v——整机前进速度,m/s
v1——链条线速度,m/s
L——理论粒距,mm
l——种勺间距,mm
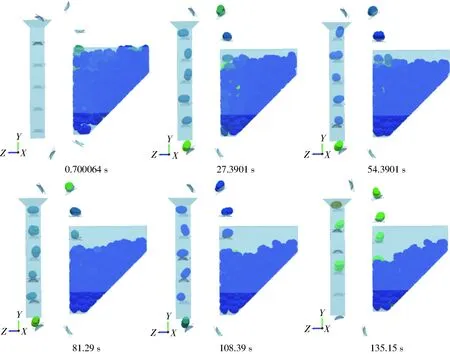
图9 排种仿真过程Fig.9 Process of chain-spoon potato metering device system
经过计算取种勺的运动速度为0.6 m/s,有效生成种薯310粒,仿真时间为168 s,其中0.7 s用于生成马铃薯种薯群。仿真时间步对仿真影响较大,若时间步过大,仿真可能发散;若时间步过小,会增加计算时间[17],通过EDEM软件自带功能自动估算时间步为1.11×10-4s。马铃薯种薯排种仿真过程如图9所示。随着升运链回转,种薯受到取种勺向上的推力和相邻种薯的摩擦阻力,种薯被取种勺分离出种群,继续随升运链旋转至排种口,完成一个周期的排种任务。
由仿真过程发现,薯群较厚时,种薯模型漏播率较小,重播率较大;仿真进行到后半程时,排种过程漏播率增大,重播率减小。
2.2.2.3试验方案与结果
种薯仿真试验方案及结果如表4所示。仿真试验方差分析结果见表5。
由表5可知,种勺最大直径对单粒合格指数、漏播指数和重播指数影响极显著(P<0.01),种勺深度对漏播指数影响显著(0.01 表4 仿真试验方案与结果Tab.4 Results and scheme of simulation experiment 表5 方差分析Tab.5 Variance analysis 注:*表示显著(P<0.05);** 表示极显著(P<0.01)。 2.3.1结构 如图10所示,抛扬式覆土装置主要由起土铲、抛扬叶轮、碎土板和覆土整形犁等组成。当联合作业机作业时,拖拉机液压系统通过油管接通液压马达驱动抛扬叶轮旋转,使起土铲铲起土壤向后上抛扬,土壤与碎土板碰撞细碎后落至地膜际边,再经过覆土整形板刮匀覆土。 地膜覆土质量是影响地膜覆盖马铃薯种植的关键因素之一[18]。覆膜土壤细碎程度和覆土量影响土垄温度,覆土质量较差极易被风雨破坏,进而影响马铃薯出苗率和产量。为了保证抛扬式覆土装置在作业过程中对地膜覆土的一致性和稳定性,需对影响其作业质量的关键参数(抛扬叶轮结构参数、转速)进行理论计算和分析。 图10 抛扬式膜际覆土装置结构图Fig.10 Structure diagram of throwing and covering soil on film edge of potato combine seeder1.外侧板 2.起土铲 3.抛扬叶轮 4.内侧板 5.覆土整形板6.传动轴 7.传动防护罩Ⅰ 8.液压马达 9.支架 10.碎土板11.传动防护罩Ⅱ 2.3.2膜际覆土量 图11 膜际覆土作业过程Fig.11 Operation process with covering soil on film edge1.起土铲 2.抛扬叶轮 3.固定架 4.碎土板 5.垄顶 6.垄沟 7.垄沟土 8.覆膜土 图11为覆土作业过程:起土铲将土壤铲起,土壤经抛扬叶轮离心力作用抛至碎土板,细碎后在内侧板和外侧板的导向下落到地膜际边,进行镇压,单侧铲起的土量应与单侧膜际覆土量相当。如图11所示,当联合作业机在单位时间内由A点至A′点时,地膜两侧覆土量为 Q=2γΔtvS (9) 其中 式中Q——地膜两侧覆土量,kg/h Δt——单位覆土时间,h γ——沙壤土容重,取1 300 kg/m3 S——起土铲有效横截面积,本文取6.668×10-3m2 w——起土铲有效宽度,取0.24 m r——起土铲铲形有效半径,取0.20 m 由式(9)计算出Q=43 064.60 kg/h,又因整机前进速度为0.69 m/s,经过计算可知整机行走0.5 m单边覆土量为5.98 kg,满足膜际边覆土要求。 图12 抛扬叶轮运动分析Fig.12 Kinematic analysis of impeller 2.3.3抛扬叶轮的转速 如图12所示,抛扬叶轮作业时,抛扬叶轮一边绕轴旋转,一边随牵引机直线前行。抛扬叶轮叶片上一点的绝对运动轨迹是一条由旋转运动与直线运动合成的摆线。牵引速度和抛扬叶轮旋转角速度不同,对抛扬叶轮覆土性能产生不同的影响。细碎后的土壤在重力作用下落至膜际对地膜进行压实。叶轮将单位时间铲起的土壤细碎后抛向碎土板,这一过程叶轮转速、叶片大小、叶片倾角均对覆土过程有影响。叶片半径R1处某一点坐标为 (10) 式中R1——抛扬叶轮叶片端点的最大回转半径,m ω——叶轮回转角速度,rad/s t——时间,s h3——起土铲后端距沟底的高度,m (11) v>ω(h3-R1) (12) 整机前进速度为0.69 m/s,设计R1为230 mm,h3为70 mm。由式(12)可得ω<4.31 rad/s。为提高碎土性能,需提高ω,最终确定叶轮回转角速度为4 rad/s。 2017年4月,在甘肃省酒泉市铸陇机械制造有限责任公司试验田进行了抛扬式膜际覆土马铃薯播种联合作业机田间作业性能试验。试验地土壤为沙壤土,田面较平整。试验前对联合作业机进行调试,在肥箱中加入磷酸二铵固体颗粒化肥,在种箱中添加平均三轴尺寸为77 mm×64 mm×53 mm的整块种薯,种薯含水率为63.5%,表皮带少量土粉。覆膜挂接架安装(黑色)聚乙烯地膜(0.01 mm),可采用地膜回收机收集。链勺式排种装置的链勺最大直径为77 mm,深度为25.5 mm。测定试验指标前需将试验后的地块划分为10个小区,每个小区为长度20 m的单垄。 试验动力采用东方红MF554型拖拉机,标定功率为40.45 kW,作业机前进速度为0.69 m/s。依据NY/T 1415—2007《马铃薯种植机质量评价技术规范》测定合格指数、漏种指数、重播指数、种植深度合格率和种薯间距合格指数[19-20],覆土倾角作为能够体现联合作业机工作性能的测试指标;重点对旋耕装置、链勺式排种装置和抛扬式测覆土装置的运转情况进行检验。膜际覆土量和土量倾角分别用精度1 mm钢板尺和角度尺测量,对每个小区按5 m距离分别测取膜际覆土倾角。抛扬式膜际覆土马铃薯播种联合作业机田间试验如图13所示。 图13 田间试验Fig.13 Field test 抛扬式膜际覆土马铃薯播种联合作业机田间试验结果如表6所示。由试验结果可得,抛扬式膜际覆土马铃薯播种联合作业机试验指标均达到国家标准要求。试验中整机传动运转平稳可靠,旋耕装置 能将土壤分离为3个交替区(层土区和碎土区)。链勺式排种装置取种流畅、排种精确。抛扬式覆土装置传动比合理,叶轮能将起土铲铲起土壤抛出,未发现起土铲后端出现壅土现象,叶轮转速能将土壤细碎,能将地膜两边覆盖紧实,覆土角度合理。与传统马铃薯联合作业播种机播深合格率相比提升了4.87%[18]。 表6 田间试验结果Tab.6 Results of field test (1)设计的马铃薯播种联合作业机采用分段机架,播深合格率指标优于传统播种机。依据离散元法优选出取种效果较好的链勺尺寸。计算出抛扬式膜际覆土装置核心部件的结构和运动参数,提高了地膜际边覆土质量。 (2)田间试验表明,抛扬式膜际覆土马铃薯播种联合作业机播种合格指数为88.6%,漏种指数为5.3%,重播指数为6.1%,种植深度合格率为90.4%,种薯间距合格指数为89.4%,覆土倾角为65.3°,田间性能试验指标均达到行业标准要求,能够完成旋耕、施肥、马铃薯播种、起垄、覆膜、膜际覆土一体化作业。 1 贾晶霞,杨德秋,李建东,等.马铃薯栽培农艺与机械化生产技术调研综述[J].农机化研究,2010,32(11):1-6. JIA Jingxia, YANG Deqiu, LI Jiandong, et al. Investigation summary about potato planting agriculture and mechanical production technique[J]. Journal of Agricultural Mechanization Research, 2010, 32(11): 1-6.(in Chinese) 2 谢奎忠,陆立银,胡新元,等.干旱半干旱地区适宜马铃薯主粮化战略新品种筛选试验[J]. 中国种业,2017(9):48-50. 3 王泽明.舀勺式马铃薯播种机排种器的设计与试验研究[D].哈尔滨:东北农业大学,2015. 4 牛若超. 马铃薯大垄双行栽培示范[J]. 中国马铃薯,2010,24(2):84-85. NIU Ruochao. Cultivation demonstration of potato wide ridge with double-row[J]. Chinese Potato Journal, 2010, 24(2): 84-85.(in Chinese) 5 刘全威,吴建民,王蒂,等.马铃薯播种机的研究现状及进展[J].农机化研究,2013,35(6):238-241. LIU Quanwei, WU Jianmin, WANG Di, et al. Current status and progess of the potato seeder[J]. Journal of Agricultural Mechanization Research, 2013, 35(6): 238-241.(in Chinese) 6 高波,王昕玮,李洋,等. 1220B型宽垄双行马铃薯联合作业机的研制[J]. 农机化研究,2013,35(3):121-125. GAO Bo, WANG Xinwei, LI Yang, et al. Development of 1220B-type double-wide ridge combine potato planter[J]. Journal of Agricultural Mechanization Research, 2013, 35(3): 121-125.(in Chinese) 7 李明金,许春林,李连豪,等.2CM-4型马铃薯播种施肥联合作业机的研制[J].黑龙江八一农垦大学学报,2012,24(1):14-16. LI Mingjin, XU Chunlin, LI Lianhao, et al. Research and development of 2CM-4 sowing and fertilization combined machine for potato[J]. Journal of Heilongjiang Bayi Agricultural University, 2012, 24(1): 14-16.(in Chinese) 8 高明全,张旭东,刘维佳,等.2CM-2型马铃薯播种机关键部件的设计[J].沈阳农业大学学报,2012,43(2):237-240. GAO Mingquan, ZHANG Xudong, LIU Weijia, et al. Design on the critical parts of 2CM-2 type potato planter[J]. Journal of Shenyang Agricultural University, 2012, 43(2): 237-240.(in Chinese) 9 高雄,郝磊.2CMG-4型马铃薯播种机排肥试验研究[J].农机化研究,2016,38(4):205-208. GAO Xiong, HAO Lei. Study on fertilizer experiment of 2CMG-4 type potato planter[J]. Journal of Agricultural Mechanization Research, 2016, 38(4): 205-208.(in Chinese) 10 岳群,蒋金琳,战长龄,等.小型多功能马铃薯种植机的设计与试验[J].农机化研究,2015,37(10):128-131. YUE Qun, JIANG Jinlin, ZHAN Changling, et al. Design and test of multifunctional small potato planting machine[J]. Journal of Agricultural Mechanization Research, 2015, 37(10): 128-131.(in Chinese) 11 李成松,冯玉磊,坎杂,等. 单行悬挂式马铃薯施肥种植机的研制[J]. 江苏农业科学,2013,41(6):369-371. 12 段青天,盛国成. 2CM-1型马铃薯种植机的研究与设计[J]. 中国农机化学报,2016,37(2):39-42. DUAN Qingtian, SHENG Guocheng. Research and design of 2CM-1 type potato planting machine[J]. Journal of Chinese Agricultural Mechanization, 2016, 37(2): 39-42.(in Chinese) 13 吕金庆,杨颖,李紫辉,等. 舀勺式马铃薯播种机排种器的设计与试验[J]. 农业工程学报,2016,32(16):17-25. LÜ Jinqing, YANG Ying, LI Zihui, et al. Design and experiment of cup-belt type potato seed-metering device[J]. Transactions of the CSAE, 2016, 32(16): 17-25.(in Chinese) 14 张波屏. 现代种植机械工程[M]. 北京:机械工业出版社,1997:298-319. 15 张一峰. 马铃薯旋耕起垄播种机的设计研究[J]. 农业机械,2014(11):138-140. 16 冯斌,孙伟,石林榕,等. 收获期马铃薯块茎碰撞恢复系数测定与影响因素分析[J]. 农业工程学报,2017,33(13):50-57. FENG Bin, SUN Wei, SHI Linrong, et al. Determination of restitution coefficient of potato tubers collision in harvest and analysis of its influence factors[J]. Transactions of the CSAE, 2017, 33(13): 50-57.(in Chinese) 17 牛康,周利明,苑严伟,等. 勺链式马铃薯排种器自补种系统设计与试验[J/OL]. 农业机械学报,2016,47(增刊):76-83. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2016s012&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.S0.012. NIU Kang, ZHOU Liming, YUAN Yanwei,et al.Design and experiment on automatic compensation system of spoon-chain potato metering device[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(Supp.): 76-83.(in Chinese) 18 孙伟,刘小龙,张华,等. 马铃薯施肥播种起垄全膜覆盖种行覆土一体机设计[J]. 农业工程学报,2017,33(20):14-22. SUN Wei, LIU Xiaolong, ZHANG Hua, et al. Design of potato casing soil planter in all-in-one machine combined with fertilizing, sowing, ridging, complete film mulching and planting line covering[J]. Transactions of the CSAE, 2017, 33(20): 14-22.(in Chinese) 19 王希英,唐汉,王金武,等. 双列交错勺带式马铃薯精量排种器优化设计与试验[J/OL]. 农业机械学报,2016,47(11):82-90. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20161111&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.11.011. WANG Xiying, TANG Han, WANG Jinwu, et al. Optimized design and experiment on double-row cross spoon-belt potato precision seed metering device[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11): 82-90.(in Chinese) 20 杨然兵,杨红光,尚书旗,等. 拨辊推送式马铃薯收获机设计与试验[J/OL]. 农业机械学报,2016,47(7):119-126. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160717&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.07.017. YANG Ranbing, YANG Hongguang, SHANG Shuqi, et al. Design and test of poking roller shoving type potato harvester[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 119-126.(in Chinese)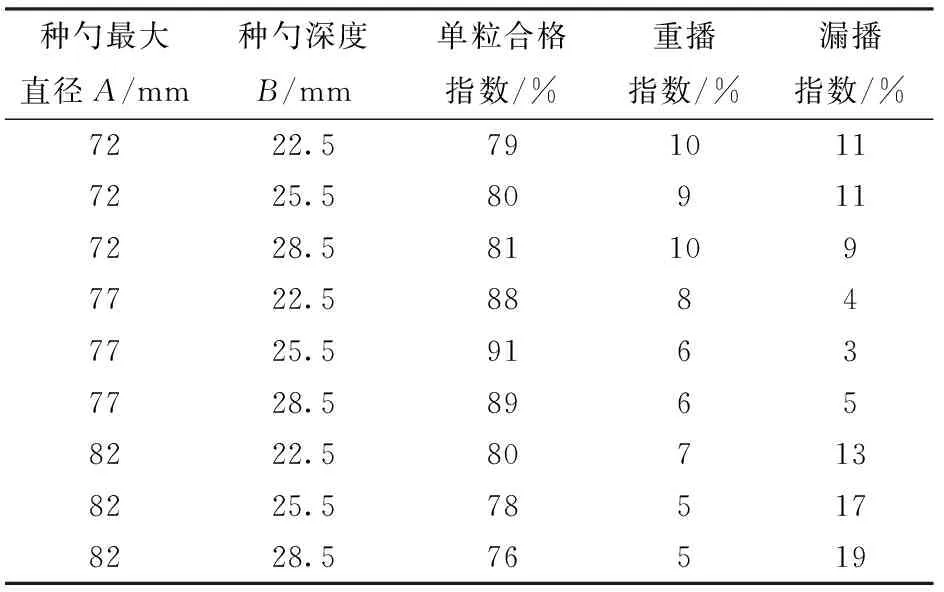

2.3 抛扬式膜际覆土装置

3 试验结果与分析
3.1 试验条件与材料
3.2 试验方法

3.3 结果分析
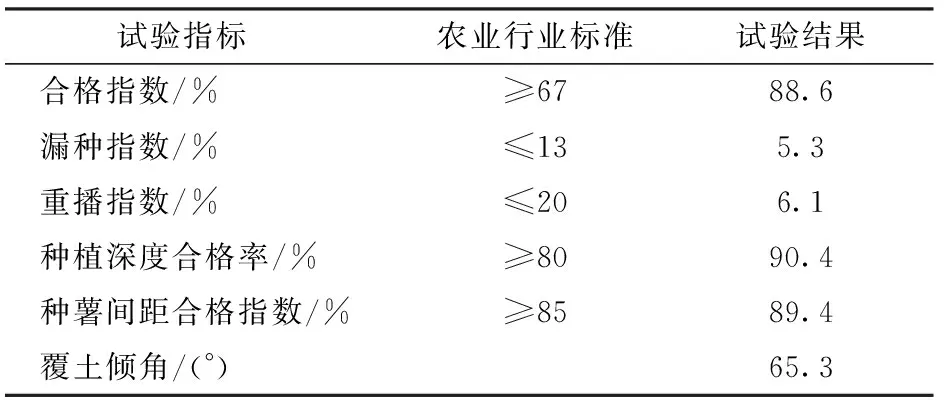
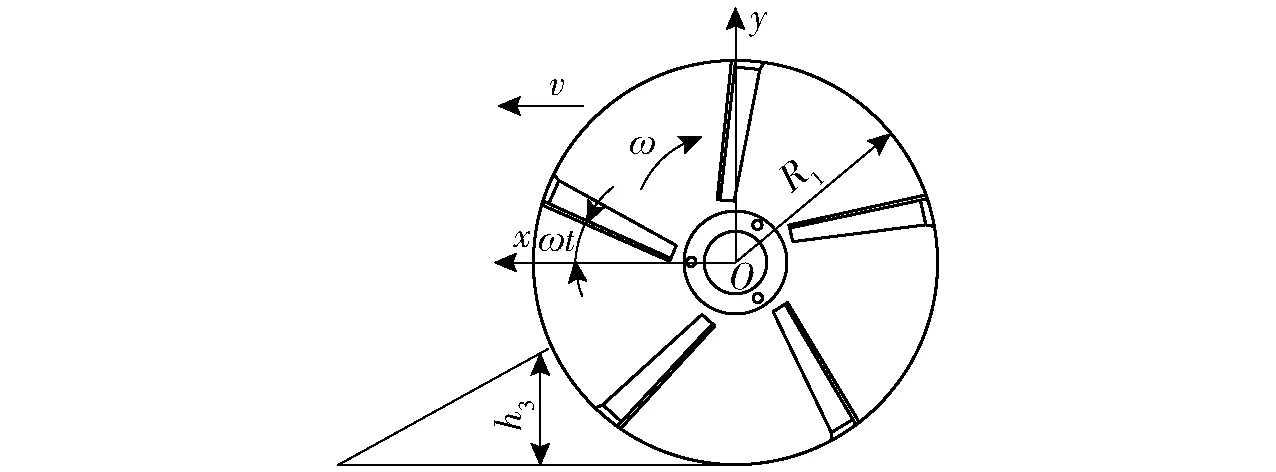
4 结论
