液肥深施机差动式双向供肥分配装置设计与试验
2018-07-05王金武周文琪白海超王金峰黄会男王忠波
王金武 周文琪 白海超 王金峰 黄会男 王忠波
(东北农业大学工程学院, 哈尔滨 150030)
0 引言
液肥深施技术是将液态肥料深施到作物根系附近的一项施肥技术[1-2],具有使作物增产效果显著等优点,从而被广泛应用。
分配器是深施型液态施肥机的核心工作部件,该机构不断地向扎穴机构[3-5]提供液态肥,满足扎穴机构入出土喷肥的功能,其性能的优劣直接决定了扎穴机构喷肥质量和供肥效率[6-7]。目前深施型液态施肥机分配器分为凸轮间歇式分配器[8]与液肥转子式转换器[9]。凸轮间歇式分配器利用盘型凸轮机构的旋转运动特性,使顶杆作上、下往复运动,满足液肥间歇喷施功能即喷肥针入出土喷肥。此种施肥系统的结构复杂,液肥在分配器到扎穴机构管路系统流动过程中能量损失较大[10]。液肥转子式转换器通过空间凸轮以及差动轮系的结构特性,软管可直接将转换器肥路接口与扎穴机构喷肥针肥路接口相互连接(扎穴机构喷肥针为围绕太阳轮的旋转运动),此机构可减少液肥通过扎穴机构的复杂管路系统,其能量损失小。但此转换器由于与两个喷肥针配套工作,仅能满足扎穴机构单侧喷肥。且安装位置只能置于喷肥针侧面,所以,工作过程中输肥软管易与施肥的作物发生干涉,施肥效率低。
为了满足液肥能量损失小与高效率施肥,本文根据斜置式扎穴机构的结构形式,设计与其配套的差动式双向供肥分配装置,并通过试验进行机构性能的验证。
1 差动式双向供肥分配装置整体结构与工作原理
差动式双向供肥分配装置主要由链轮轴壳体、链轮轴、主轴套、副轴套、行星轮、内齿圈、顶杆、外壳体、空间凸轮等部分组成(以单侧进行说明)。链轮轴贯穿链轮轴壳体分别与副轴套、主轴套通过花键连接,主轴套一端面与副轴套一端面固结。主轴套另一端面圆周对称镶嵌2个行星轮,与行星轮啮合的内齿圈套在外壳体上且其上固结1个链轮圈。副轴套内对称镶嵌2个顶杆,与顶杆上滚子处配合的空间凸轮固结在外壳体上,外壳体与链轮轴壳体固结。总装图如图1a所示,关键零件如图1b所示。
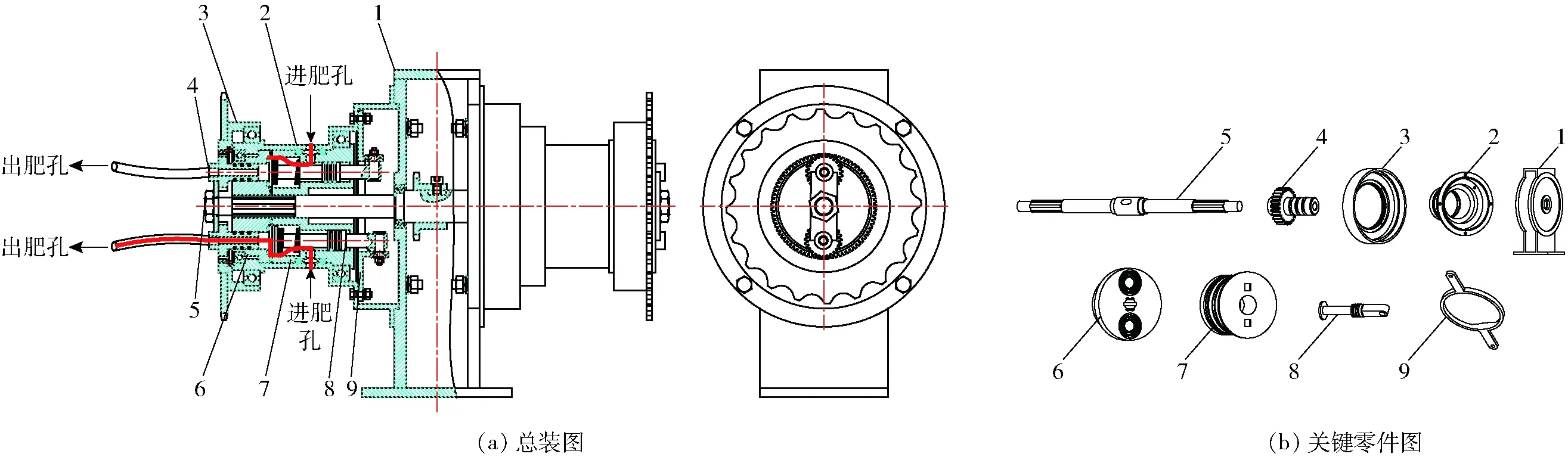
图1 差动式双向供肥分配装置Fig.1 Differential-type bidirectional distribution device for fertilizer supply1.链轮轴壳体 2.外壳体 3.内齿圈 4.行星轮 5.链轮轴 6.主轴套 7.副轴套 8.顶杆 9.空间凸轮
工作时,外动力源分别驱动链轮轴与内齿圈。链轮轴带动主轴套与副轴套作旋转运动,主轴套带动行星轮作周向转动,同时与行星轮相互啮合的内齿圈按一定的转速比作相同运动(此处行星轮运动状态为围绕轴心线自转与链轮轴心线公转的合成运动)。主轴套与副轴套、行星轮、内齿圈组成差动轮系系统,使得行星轮角速度为零。副轴套带动顶杆作旋转运动,在压力弹簧的作用下,使顶杆在空间凸轮上作左右往复直线运动,实现主轴套与副轴套端面处的液肥流口打开和闭合。
液肥从进肥孔以一定压力流入,当顶杆运动到空间凸轮的推程到回程阶段时,液肥从出肥孔流出,图1a中红色曲线为液肥流动方向,经软管最后由喷肥针施入土壤中。当顶杆运动到近休止阶段时,顶杆关闭,液肥储存在主轴套与副轴套腔内。
2 关键部件结构参数的确定
2.1 传动比设计
斜置式扎穴机构中喷肥针肥路接口处的运动为围绕太阳轮旋转中心的圆周运动,以及相对于行星架的非匀速转动,如图2所示。前期研究表明,在两种运动合成下,肥路接口处与水平面的夹角呈周期性变化、摆动幅度为47.6°。所以,采用双行星轮-内齿圈组合机构,满足差动式双向供肥分配装置肥路接口处角速度为零以及围绕旋转中心作圆周运动的匹配特性要求,使其与斜置式扎穴机构喷肥针肥路接口处运动方式一致,解决了差动式双向供肥分配装置与斜置式扎穴机构之间连接软管缠绕的问题。双行星轮-内齿圈组合机构简图如图3所示。
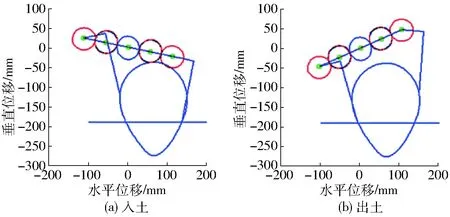
图2 喷肥针软管接口处摆角变化Fig.2 Swing angle change of hose mouth spray fertilizer needle
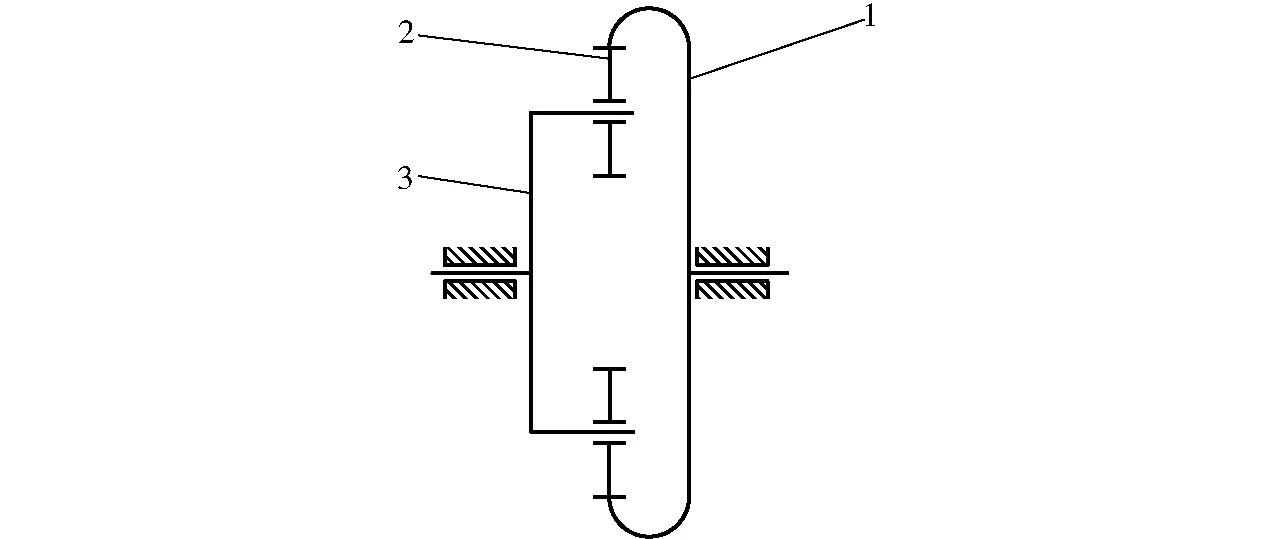
图3 双行星轮-内齿圈组合机构Fig.3 Combination mechanism of double planetary gears-annular gear1.内齿圈 2.行星轮 3.行星架H
根据差动式双向供肥分配装置结构尺寸的合理配置,设定机构中内齿圈与行星轮的齿数分别为75、25,可得行星轮与内齿圈的传动比为[11-12]
(1)
式中ω1——内齿圈角速度,rad/s
ω2——行星轮角速度,rad/s
ωH——行星架角速度,rad/s
ω1H——转化后内齿圈角速度,rad/s
ω2H——转化后行星轮角速度,rad/s
z1——内齿圈齿数
z2——行星轮齿数
根据行星轮角速度为零的特性要求,由式(1)可求得
(2)
即链轮轴角速度与内齿圈角速度之比为3∶2。
2.2 空间凸轮设计
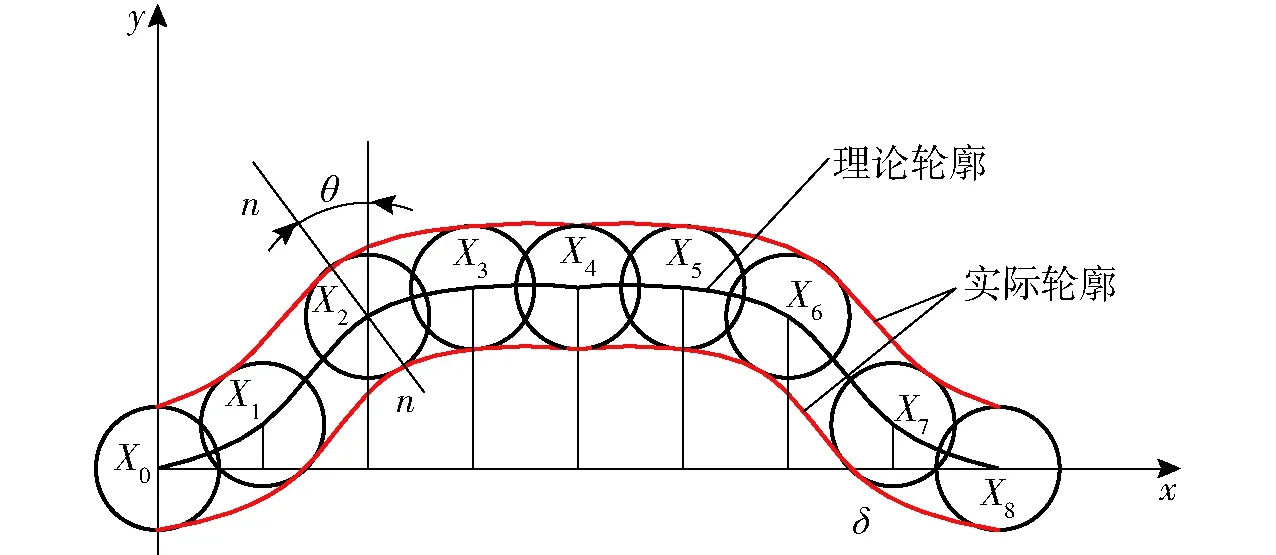
图4 空间凸轮廓线展开图Fig.4 Cylindrical cam lineament expansion drawing
空间凸轮需满足顶杆在其轮廓线滑动时,喷肥针入土即喷肥,出土即停喷。顶杆在推程阶段和回程阶段的运动可采用简谐运动规律,空间凸轮廓线可采用展开法求得,如图4所示。横坐标表示凸轮转角,用δ表示;纵坐标表示顶杆位移,用s表示,则展开的理论轮廓线坐标为[13-14]
(3)
式中 (x1,y1)——空间凸轮理论轮廓线坐标,mm
r0——平均圆柱半径,mm
δ——空间凸轮转角,rad
s——顶杆位移,mm
顶杆位移采用余弦加速度运动规律求得,计算式[15-16]为
(4)
式中h——顶杆行程,mm
δ01——推程运动角,rad
δ02——回程运动角,rad
工作轮廓曲线坐标为[17]
(5)

式中 (x2,y2)——凸轮工作轮廓线坐标,mm
rr——顶杆滚子半径,mm
θ——压力角,rad
dx1——x1的增量,mm
dy1——y1的增量,mm
dδ——δ的增量,rad
根据差动式双向供肥分配装置整体结构尺寸确定空间凸轮机构的平均圆柱半径为100 mm,行程最大值为6 mm,顶杆滚子半径为10 mm。通过喷肥针入出土与水平面的夹角确定空间凸轮的推程运动角为31.8°,回程运动角为25.6°,获得空间凸轮三维模型如图5所示。

图5 空间凸轮三维模型Fig.5 Three-dimensional model of space-cam
3 行星轮运动轨迹分析
根据差动式双向供肥分配装置双行星轮-内齿圈的机构特点,将其结构简化为图6所示示意图,并建立XOY直角坐标系。
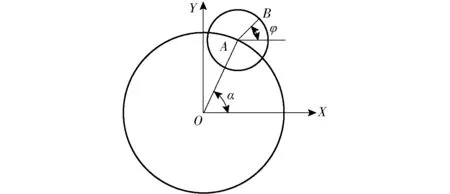
图6 双行星轮-内齿圈结构示意图Fig.6 Structure diagram combination mechanism of double planetary gears-annular gear
A既为行星轮的转动中心也为行星架OA的一个端点,行星架OA绕着中心O转动。所以行星轮的转动中心A为绕着转动中心O作半径为LOA的圆周运动,其轨迹为以O为圆心,半径为LOA的圆。行星架OA逆时针转动则α为正,反则为负。轨迹方程为
(6)
式中 (xA,yA)——A点坐标,mm
α——行星架OA与X轴的夹角,rad
由于双行星轮-内齿圈组合机构在运动过程中行星轮的角速度为零,即AB与X轴的夹角φ为定值,则行星轮的某一轮齿顶点B相对于行星轮转动中心A的运动轨迹方程为
(7)
式中 (xB,A,yB,A)——行星轮某一轮齿顶点B相对于转动中心A的坐标,mm
行星轮的某一轮齿顶点B的绝对运动轨迹方程为
(8)
式中 (xB,yB)——B点坐标,mm
双行星轮-内齿圈组合机构在运动过程中行星轮的角速度为零,即φ为常数,则式(8)中LABcosφ与LABsinφ为常数。所以,行星轮的某一轮齿顶点B的运动轨迹为以(LABcosφ,LABsinφ)为中心,LOA为半径的圆,即顶点B的运动轨迹与转动中心A的运动轨迹形状相同,只是顶点B的转动中心沿X轴方向移动LABcosφ,沿Y轴方向移动LABsinφ。
4 性能试验
4.1 软管防缠绕性能测试试验
为了检验差动式双向供肥分配装置与斜置式扎穴机构喷肥针连接的输肥软管互相不缠绕性能,进行测试试验。试验地点为哈尔滨市依兰县示范基地。差动式双向供肥分配装置、斜置式扎穴机构以及输肥连接软管的安装位置如图7所示。

图7 装置安装位置Fig.7 Diagram of device installation location
在一个工作周期内,记录差动式双向供肥分配装置与斜置式扎穴机构每次间隔旋转45°时的输肥软管工作状态,查看其防缠绕性能。记录的试验结果如图8所示。
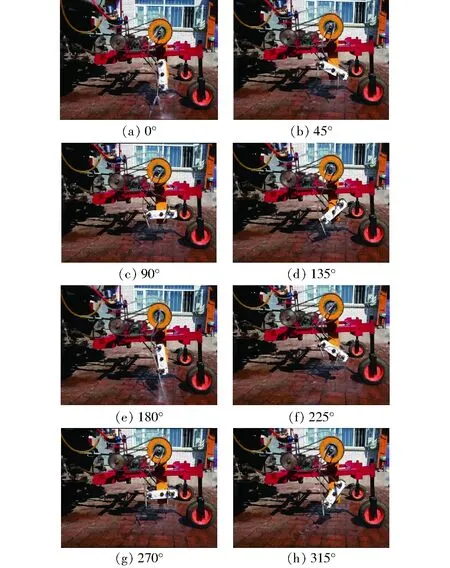
图8 软管防缠绕性能试验Fig.8 Performance experiment of anti-winding for hose
试验结果表明输肥软管在各个角度位置并未发生缠绕,差动式双向供肥分配装置设计合理,能够解决输肥软管的缠绕问题。斜置式扎穴机构肥路接口与差动式双向供肥分配装置肥路接口的运动方式变化相一致,所以在运动过程中输肥软管未发生缠绕。
4.2 喷肥性能测试试验
4.2.1试验测试方法
为了检验差动式双向供肥分配装置的喷肥性能,进行了喷肥性能试验,如图9所示。

图9 喷肥性能测试试验Fig.9 Performance experiment of spraying liquid fertilizer
由于伯努利方程的适用条件为定常流动,同时为了计算液肥能量损失的具体数值,试验时将差动式双向供肥分配装置的顶杆置于开度最大状态,即顶杆均处于空间凸轮的远休止角处,此时顶杆的推程为6 mm。试验中选用的喷肥针含有2个喷肥孔,喷肥孔的直径为2.5 mm,整个装置包含4个喷肥针。试验时,以液压泵压力为影响因子,因子选取0.2、0.3、0.4 MPa 3个水平,分别在每个水平下用秒表计时,用量筒与针筒测量喷肥针在一定时间内(试验中以5 s为基准)喷出液态肥的体积,每个水平重复5次试验。差动式双向供肥分配装置喷肥针的液肥流速和液压泵出口处的流速计算式分别为
(9)
(10)
式中v2——喷肥针出口流速,m/s
V——液肥体积,m3
A2——单个喷肥针出口处横截面积,m2
t——时间,s
v1——液态肥在液压泵出口处流速,m/s
A1——液压泵出口横截面面积,m2
最终再根据伯努利方程[18]确定新装置的节能情况。
(11)
式中p1——液压泵出口的液肥静压,Pa
p2——喷肥针出口的液肥静压,Pa
ρ——液肥密度,kg/m3
z1——液压泵出口位置水头,m
z2——喷肥针出口位置水头,m
hw——液肥总水头损失,m
4.2.2试验结果与分析
试验数据如表1所示,通过表1中液肥的体积总和与时间总和,经计算可获得喷肥针出口在不同压力下液态肥的流速为8.7、10.4、12.1 m/s。液压泵出口处的横截面直径为11 mm,则流速通过流体的连续性方程(式(10))计算求得为1.8、2.1、2.5 m/s。
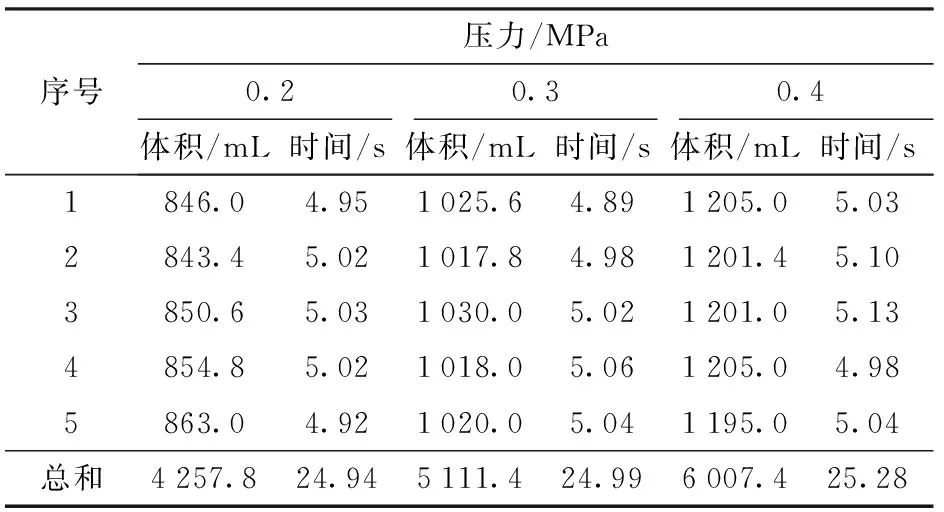
表1 新管路系统液肥体积与时间数据Tab.1 New pipeline system liquid fertilizer volume and time data
由于位置水头差约等于1.0 m,喷肥针出口处液肥流动为自由出流,因此p2-p1为零。根据喷肥针出口处、液压泵出口处的速度及伯努利方程,可得整个管路系统的液肥随压力变化的总水头损失[19-20]为9.0、12.6、15.0 m(H2O)。
运用同样的测试与计算方法对液肥转子式转换器进行试验,得到总水头损失分别为11.1、15.7、20.5 m(H2O)。所以,差动式双向供肥分配装置的管路系统节约能量分别为2.1、3.1、5.5 m(H2O)。运用Excel软件对其进行分析,得到节约能量与液压泵压力的关系如图10所示。
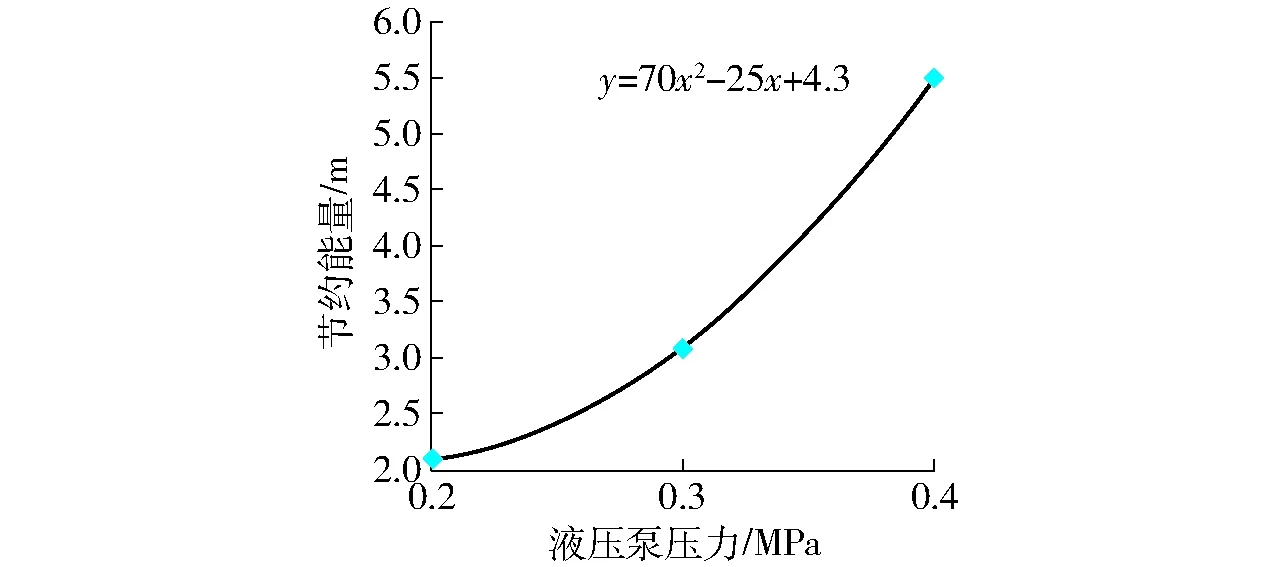
图10 节约能量与液压泵压力关系曲线Fig.10 Relationship curve of spraying liquid fertilizer saving energy and hydraulic pump pressure
根据总水头损失,可得随着液泵压力的逐渐增大,液肥能量损失逐渐增大。且从图10中可以看出,节约能量逐渐增大呈抛物线变化规律,曲线函数为y=70x2-25x+4.3,由试验结果得知,差动式双向供肥分配装置喷肥性能较高。
5 结论
(1)设计了差动式双向供肥分配装置,并阐述了机构的工作原理,为了达到与喷肥针软管接头一致的运动规律,确定了机构的传动比以及关键部件
参数。即链轮轴角速度与内齿圈角速度之比为3∶2。空间凸轮的推程运动角为31.8°,回程运动角为25.6°,平均圆柱半径为100 mm,行程最大值为6 mm。
(2)对机构进行运动学分析,建立了行星轮旋转中心A处绝对运动轨迹方程,并得到行星轮上某一点B的运动轨迹。从方程获知,B点作以(LABcosφ,LABsinφ)为中心、LOA为半径的圆周运动。所以,运动学分析可充分揭示软管不缠绕的机理。
(3)进行机构防缠绕试验,以360°为一周期,观测软管之间运动状态,试验结果表明,软管之间无缠绕。进行喷肥性能对比试验,通过在一定时间内,根据不同液压泵压力,测得了喷肥针喷肥口处液肥的容量,求得喷肥针出口处以及液压泵出口处的速度,并根据伯努利方程计算出整个管路系统的液肥能量损失为9.0、12.6、15.0 m(H2O),节约能量为2.1、3.1、5.5 m(H2O)。试验结果表明,差动式双向供肥分配装置的节约能量逐渐增大呈现抛物线变化规律,喷肥性能高。
1 VIEIRA-MEGDA M X, MARISNO E, LEITE J M, et al. Contribution of fertilizer nitrogen to the total nitrogen extracted by sugarcane under Brazilian field conditions[J]. Nutrient Cycling in Agroecosystems,2015,101(2):241-257.
2 COSTA M C G, VITTI G C, CANTARELLA H. N-NH3losses from nitrogen sources applied over unburned sugarcane straw[J]. Revista Brasileira de Ciência do Solo, 2003,27(4):631-637.
3 王金武,周文琪,王金峰,等.斜置式非规则齿轮行星轮系扎穴机构工作参数试验优化[J/OL].农业机械学报,2017,48(6):66-70.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170608& flag=1. DOI:10.6041/j.issn.1000-1298.2017.06.008.
WANG Jinwu, ZHOU Wenqi, WANG Jinfeng, et al. Experiment and optimization of working parameters for pricking hole mechanism of oblique type non-circular gears planetary system[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2017,48(6):66-70.(in Chinese)
4 王金武,周文琪,王秀,等.基于三次拉格朗日曲线拟合轨迹的斜置式扎穴机构研究[J/OL].农业机械学报,2017,48(5):79-85. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170509&flag=1. DOI:10.6041/j.issn.1000-1298.2017.05.009.
WANG Jinwu,ZHOU Wenqi,WANG Xiu, et al. Oblique type pricking hole mechanism based on Lagrange curve for cubic fitting trajectory[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(5):79-85.(in Chinese)
5 冯金龙,王金武,周文琪,等.变形椭圆齿轮式扎穴机构设计与工作参数试验优化[J/OL].农业机械学报,2017,48(4):90-96. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170411&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.04.011.
FENG Jinlong,WANG Jinwu,ZHOU Wenqi,et al. Design of pricking hole mechanism with deformation elliptical gears and optimization of experiment with work parameters[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2017,48(4):90-96.(in Chinese)
6 何剑南.液肥注射式工作部件的工作机理与试验研究[D].哈尔滨:东北农业大学,2013.
HE Jiannan. Study on working principle and experiment of work components of liquid fertilizer injection type[D]. Harbin:Northeast Agricultural University,2013.(in Chinese)
7 王金武,潘振伟,周文琪,等.SYJ-2型液肥变量施肥机设计与试验[J/OL].农业机械学报,2015,46(7):53-58.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150708&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.07.008.
WANG Jinwu, PAN Zhenwei, ZHOU Wenqi, et al. Design and test of SYL-2 type liquid variable fertilizer[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2015,46(7):53-58. (in Chinese)
8 王金武,何剑南,潘振伟,等.液态施肥机液肥分配器凸轮运动学分析与仿真[J/OL].农业机械学报,2013,44(4):77-82.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20130414&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2013.04.014.
WANG Jinwu, HE Jiannan, PAN Zhenwei, et al. Kinematic analysis and simulation of liquid fertilizer distributor’s cam for liquid fertilizer applicator[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2013,44(4):77-82. (in Chinese)
9 王金武,潘振伟,杨欣伦,等.深施型液态施肥机液肥转子式转换器设计与试验[J/OL].农业机械学报,2014,45(10):110-115. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_ no=20141018&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2014.10.018.
WANG Jinwu, PAN Zhenwei, YANG Xinlun, et al. Design and experiment of rotary converter of liquid fertilizer[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2014,45(10):110-115.(in Chinese)
10 苗森春.离心泵作液力透平的能量转换特性及叶轮优化研究[D].兰州:兰州理工大学,2016.
MIAO Senchun. Research on energy conversion characteristics and impeller optimization of pump as turbine [D].Lanzhou:Lanzhou University of Technology, 2016.(in Chinese)
11 薛会玲,刘更,杨小辉.周转轮系功率流与传动效率分析的简化方法[J].机械传动,2017,41(1):43-48.
XUE Huiling,LIU Geng, YANG Xiaohui. Simplified method for the power flow and transmission efficiency analysis of epicyclic gear train[J]. Mechanism and Machine Theory,2017,41(1):43-48.(in Chinese)
12 孙桓.机械原理[M].北京:高等教育出版社,2005.
13 潘振伟.液肥肥路转换器及输肥系统设计与试验研究[D].哈尔滨:东北农业大学,2014.
PAN Zhenwei. Design and experimental study of liquid feritilizer pripeline converter and transporting liquid fertilizer system[D]. Harbin:Northeast Agricultural University,2014.(in Chinese)
14 叶秉良,李丽,俞高红,等.蔬菜钵苗移栽机取苗臂凸轮机构的设计与试验[J].农业工程学报,2014,30(8):21-29.
YE Bingliang, LI Li, YU Gaohong, et al. Design and test on cam mechanism of seedling pick-up arm for vegetable transplanter for pot seedling[J]. Transactions of the CSAE,2014,30(8):21-29. (in Chinese)
15 LIU G D,CHEN G H,PAN Z X,et al. Application of the cubic spline interpolation function in the kinematic analysis of cam mechanism[J]. Journal of Mechanical Transmission,2007,31(5):53-56.
16 ZHOU Changjiang, HU Bo, CHEN Siyu, et al. Design and analysis of high-speed cam mechanism using Fourier series[J]. Mechanism and Machine Theory, 2016,104:118-129.
17 张俊,张晓婷.流体传输中流体阻力和水头损失的计算[J].流体传动与控制,2011(4):24-27.
ZHANG Jun,ZHANG Xiaoting. The analysis of the fluid resistance and the pressure loss in fluid transmission system[J].Fluidpower Transmission and Control,2011(4):24-27.(in Chinese)
18 李启麟,刘红霞.液压传动中的能量损失与压力损失[J].液压与气动,2002(5):29-30.
LI Qilin,LIU Hongxia.The loss of energy and the loss of pressure in hydraulic transmission[J]. Hydraulics and Pneumatics,2002(5):29-30.(in Chinese)
19 赵毅山.流体力学[M].上海:同济大学出版社,2004.
20 陈波,高殿荣,杨超,等.基于PDPA的双流体撞击式喷嘴雾化特性研究[J/OL].农业机械学报,2017,48(4):362-369. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170448&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.04.048.
CHEN Bo,GAO Dianrong,YANG Chao,et al.Atomizing characteristics of twin-fluid impact nozzle based on PDPA[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2017,48(4):362-369.(in Chinese)
