自动移栽机整排取苗间隔投苗控制系统设计与试验
2018-07-05胡建平杨丽红韩绿化毛罕平张思伟
胡建平 常 航 杨丽红 韩绿化 毛罕平 张思伟
(1.江苏大学现代农业装备与技术教育部重点实验室, 镇江 212013; 2.江苏省农业装备与智能化高技术研究重点实验室, 镇江 212013)
0 引言
蔬菜穴盘钵苗移栽技术因具有诸多优势而受到广泛推广,但我国现阶段主要以半自动化移栽机械为主,需人工完成取苗、投苗过程,不仅耗费劳动力,而且人工作业存在速度有限、易疲劳的缺点,制约了移栽效率的提高[1]。因此实现取、投自动化是推动半自动移栽机械向全自动化方向发展的重要环节。目前我国现有的全自动移栽机采用的取投方式主要为顶杆顶出式[2]、插入夹取式[3~5]和顶出夹取式[6~9]。
韩长杰等[8]设计的穴盘苗移栽机自动取喂系统中采用翻转摆位式取苗机械手实现钵苗的取投,依靠翻转气缸和摆位气缸控制机械手实现取苗位和投苗位的姿态变换,扎放苗气缸控制柔性取苗针的伸缩完成苗的整排夹取、整排投放动作,由间歇运动式苗杯接苗,该控制系统简单、易于实现,缺点是气缸控制取苗位与投苗位姿态转换过程缺少控制,取苗精准度难以保证。吴俭敏等[9]设计的蔬菜移栽穴盘苗自动输送装置,运用曲柄连杆式顶苗机构将苗钵顶出后,夹苗装置翻转夹苗,该装置由凸轮与齿轮齿条合成机构控制夹苗爪的往复翻转,开合凸轮控制夹苗爪的开合,而上述取投控制采用纯机械控制,因此机构相对复杂,动力需依靠单独传动系统输送,对控制精度的影响还有待进一步验证。魏新华等[10]研制的穴盘苗全自动移栽机运动协调控制系统采用伺服电动机驱动直线模组控制取苗机械手在取、放苗位置之间做纵向往复运动,气动部件的驱动完成取放苗动作,钵苗直接由苗爪投入导苗筒后落入栽植器,每个苗爪可单独完成取、放苗动作,无需分苗环节,但单个取苗机械手无法达到快速取苗要求。严宵月等[11]设计的整排取苗间隔投苗装置,运用6个凸轮控制6个取苗爪落苗时序,结构简单,但机械控制调整不方便,对不同穴孔数的穴盘苗需要不同结构的凸轮控制,并且凸轮轮廓磨损后影响取苗、投苗精度。
综上所述,移箱、取苗、投苗和分苗是自动移载机的关键技术,本文在严宵月等[11]设计的纯机械式控制整排取苗、间隔投苗基础上,设计一种门型整排取投苗装置,并结合机、电、气控制技术设计一种整排取苗间隔投苗控制系统,该系统通过与移箱机构、旋转分苗机构的运动协调配合,实现自动取苗、投苗和分苗运动。
1 取苗投苗系统结构与控制原理
1.1 取苗投苗系统结构组成
取苗投苗系统包括门型取苗机构、取苗末端执行器、移箱机构、旋转分苗机构及控制系统,如图1所示。

图1 取苗投苗系统结构示意图Fig.1 Structure diagram of picking and casting system1.移箱机构 2.滑槽侧板 3.翻转门架 4.取苗爪 5.取苗爪安装板 6.分苗杯架 7.链传动装置 8.分苗杯 9.安装机架 10.分苗机构驱动链
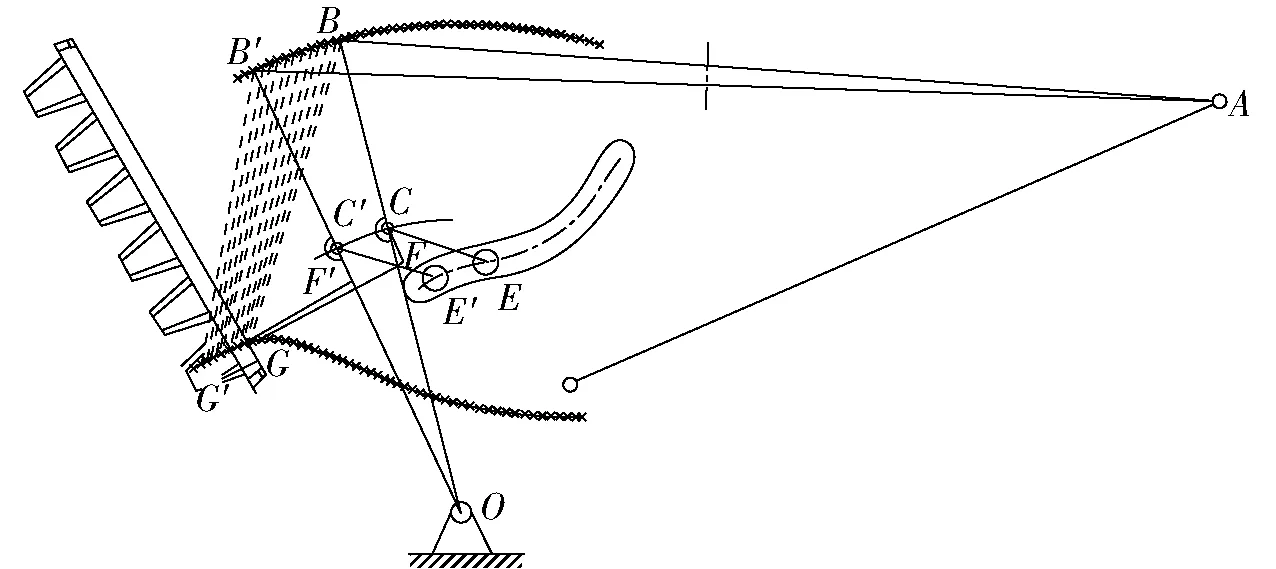
图2 取苗机构运动简图Fig.2 Trajectory diagram of picking mechanism
门型取苗机构主要由滑槽侧板、翻转门架(含翻转机构),取苗爪安装板、翻转气缸以及取苗爪组成,其机构运动简图如图2所示。取苗机构[12-13]中的翻转过程依靠双作用气缸AB来驱动,气缸AB一端A与滑槽侧板固定架转动副连接,另一端B与翻转门架杆OB转动副连接,气缸AB伸缩带动门架杆OB摆动,同时连杆CE一端轴承E在滑槽内滑动,两者复合运动形成取苗轨迹,最终取苗机构驱动连杆CE上的取苗爪FG沿取苗轨迹做取苗、移苗运动。运用Pro/E软件对取苗机构进行运动仿真分析,拾取取苗爪爪针末端点得到其运动轨迹线即为取苗机构取苗轨迹,运动轨迹末端有一段直线GG′即为取苗爪垂直穴盘插入钵体取苗的位移。
为了控制取苗爪的开合和推苗动作,气缸AB上安装3个取苗状态行程开关I1、I2、I3,其中行程开关I1、I3分别安装在气缸伸缩两端极限位置,行程开关I2位置根据取苗爪垂直插入穴盘的行程来确定,由图2分析可知,当取苗爪插入穴盘取苗行程为GG′时,对应气缸伸出量为AB′长度减去AB的长度,由此可确定磁性开关I2的安装位置。
分苗机构主要由分苗杯架、链传动装置、分苗杯组成,分苗杯固定于带耳链条上,完成接苗、带苗、落苗功能[14];工作时底盘动力经由分动箱输送给分苗机构与栽植机构,两者传动比为
(1)
式中n1——分苗杯转速n2——栽植器转速
a——单行栽植鸭嘴个数
z——分苗杯传动链轮齿数
b——苗杯对应供给的栽植行数
分苗杯随底盘前进做连续旋转运动,门型取苗机构翻转门架以两侧壁底端连接点为圆心做圆弧摆动,与此同时取苗爪安装板由于其一侧连接的销轴上的轴承沿滑槽滚转运动,使取苗爪能沿垂直插入倾斜60°的穴盘取苗[15]。
1.2 取苗投苗控制原理
根据取苗投苗机械系统工作原理,基于PLC控制器设计取苗投苗控制系统[13,15-18],取苗、投苗动作采用气动控制方式,取苗、投苗、分苗协调控制通过苗盘到位传感器、取苗状态行程开关I1、I2、I3、分苗杯到位传感器、增量式编码器、电磁阀等控制元件来实现,图3为控制系统电路图。

图3 取苗投苗控制系统电路Fig.3 Control system electrical schematic diagram of picking and casting system
自动移栽机工作时,通过检测翻转气缸的行程位置来获取取苗机构所处状态:翻转取苗、夹苗、带苗返回。每个取苗爪开合驱动气缸均由单独电磁阀控制[13],既可整投整取,也可针对于非间歇运动的分苗机构实现有序间隔投苗,并依据分苗杯速度自动调整投苗时间点。每个苗爪投苗位置点由分苗杯传感器与增量式编码器控制,分苗杯传感器采用漫反射式光电传感器,安装在机架上,当分苗杯运动到传感器位置时,接收到反射光信号而产生高电压,从而实现分苗杯定位以及对走过苗杯进行计数的功能;增量式编码器安装在分苗杯传动链轮轴上,可实时监测分苗链轮转动速率,获取分苗杯运动参数(包括速度、位移)。分苗杯传感器检测苗杯到特定位置后,编码器产生信号开始清零计数,计数值相当于分苗杯位移,当分苗杯移动量达到设定值时,取苗爪上的直线气缸伸出推动取苗爪投苗。
2 整排边插边夹取苗控制
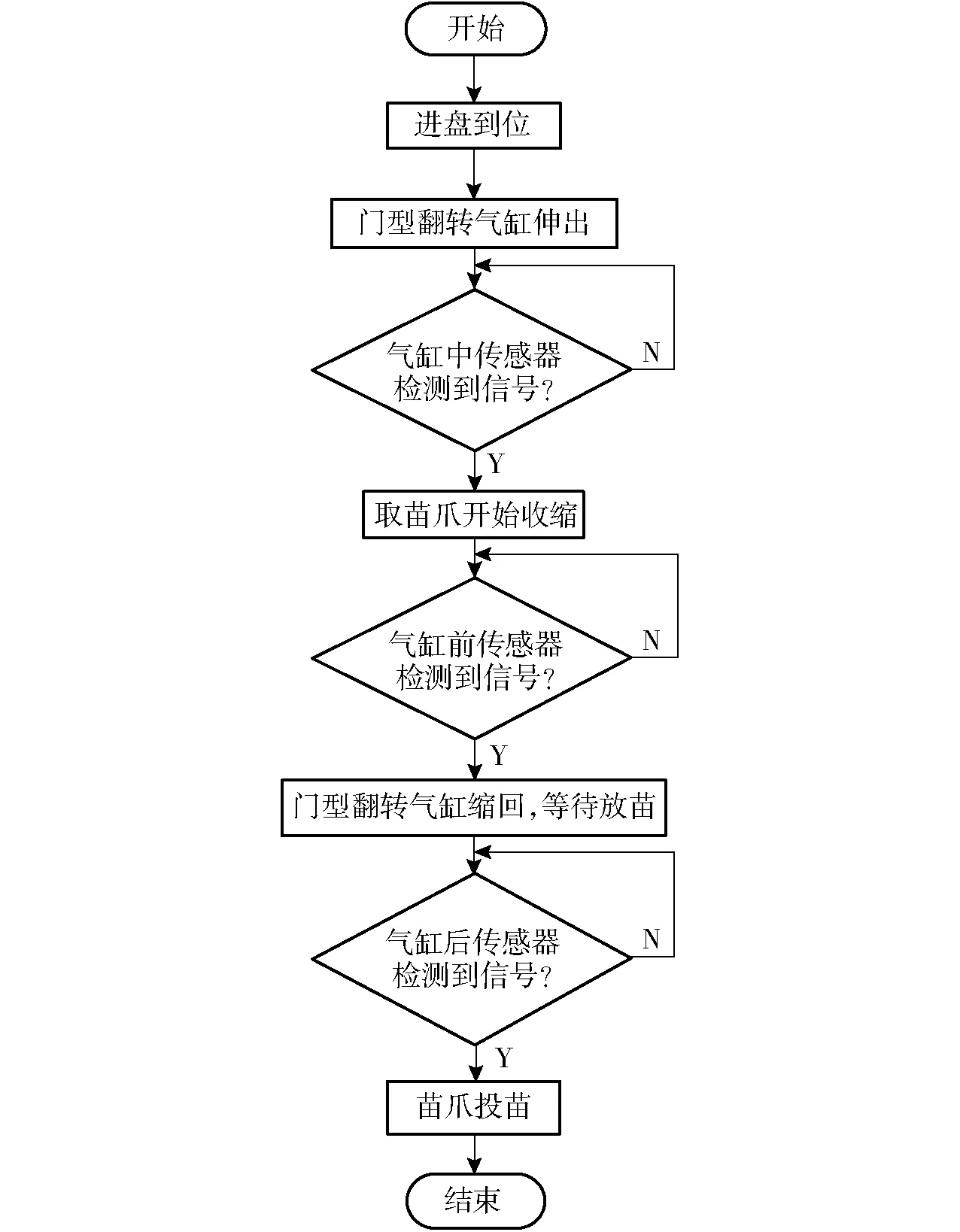
图4 取苗控制流程图Fig.4 Flow chart of picking control system
整排取苗控制流程图如图4所示,当苗盘到位后,翻转气缸伸出推动取苗爪翻转取苗,此过程中,当取苗爪翻转至爪针刚接触钵苗时磁性开关I2产生信号,执行夹苗指令,开合驱动气缸收缩,并在苗爪继续插入钵体过程中苗爪收缩完毕,夹取完成后磁性开关I3产生信号,翻转气缸缩回,苗爪沿原轨迹将钵苗拔出带至竖直位置,磁性开关I1产生信号后执行投苗指令[16]。
3 整排有序投苗控制
3.1 投苗位置点对应编码计数值计算
严宵月等[11]设计的间隔投苗方法是通过计算取苗爪逐个推后时间tn,并以此为依据设计安装凸轮控制投苗时间点。该投苗控制方式的缺点是由凸轮控制的取苗爪逐个推后投苗时间一致、不变,所要求的分苗杯旋转速度也必须保持恒定,这对实际作业的移栽机来说很难保证。本文设计的有序投苗控制系统,以投苗位置量为恒定值,投苗推迟时间点随速度变化而变化[16]。
如图5所示,当光电传感器I4检测到分苗杯杯棱,此时第1个投苗杯的投苗点与第1个取苗爪之间距离为a1,第2个投苗杯的投苗点与第2个取苗爪之间距离为a2;且a2+d1=a1+d2。由上可知a1、a2关系式a2=a1+Δd(Δd=d2-d1),同理可得a3=a1+2Δd、a4=a1+3Δd…an=a1+(n-1)Δd。因此,在分苗杯向右移动过程中,当第1个苗杯走过距离a1时,第1个苗爪投苗,第2个苗杯走过距离a2时,第2个苗爪投苗,以此类推至最后一个苗爪投苗。
分苗杯走过距离运用编码器检测,编码器与分苗杯通过传动系统联动,分苗杯移动一定距离编码转动对应的角度,产生的信号由高速计数器C620采用双向计数法记入[19],流程如图6所示。

图6 投苗控制流程图Fig.6 Flow chart of casting control system
本文中编码器通过同步带与栽植机构减速器连接,两者传动比为i1,栽植机构与分苗杯减速器传动比为i0,则
(2)
式中n3——编码器转速
设分苗杯每运动1 mm高数计数器产生的脉冲信号计数量为C,简称为毫米脉冲量;又设分苗杯链轮转i1i0圈,对应编码器转1圈,由此推出毫米脉冲量C的计算公式为
(3)
式中p——链条节距
N——编码器转一圈产生脉冲数
将毫米脉冲量C乘以取苗爪对应投苗距离就得到取苗爪投苗脉冲数
fn=C[a1+d3+(n-1)Δd]
(4)
3.2 不同栽植频率下投苗点的设定
为保证苗钵在下落到分苗杯内时,不碰到杯壁,选取钵苗一半高度落入杯中,其中心线与杯中心线重合时为最佳投苗状态。又钵苗下落过程中,分苗杯仍继续运动,因此为保证苗钵处于最佳投苗状态,同一取苗爪在不同栽植频率下,其第1个投苗位置距离a1值需不同,a1值与推苗时间t1、钵苗脱离下落时间t2有关[16]。
若将钵苗下落时间t2内的自由落体运动与分苗杯匀速横向移动复合为苗钵的抛物线运动,则取苗爪末端与分苗杯杯口的高度为

(5)
式中v0——气缸推苗速度
分苗杯在时间t1+t2内的横向移动距离
x=vm(t1+t2)
(6)
式中vm——分苗杯横向移动速度
设高度H为50 mm、气缸推苗速度v0为0.54 m/s,移栽机栽植频率为40~70 株/min,根据栽植频率与苗杯配合关系,计算得到不同栽植频率下对应分苗杯横向速度vm以及第1个接苗分苗杯横向移动距离x,如表1所示。
由表1可知,栽植频率从40株/min增加到70株/min时,对应横向移动距离差为12.45 mm,栽植频率每增加5株,对应偏移Δx约为2 mm。
以栽植频率60株/min为基准,计算出最佳投苗状态下的投苗位置点距离a1为55 mm,栽植频率为50株/min时,最佳投苗状态下的投苗位置点距离a1为53 mm,依次类推。将a1代入式(4),分别计算出72孔穴盘与128孔穴盘、不同栽植频率下首个取苗爪对应最佳投苗位置的脉冲计数f1,如表2所示。在对应栽植频率下,当编码器计数达到其投苗脉冲值时,取苗爪投苗。

表2 不同栽植频率下初始投苗脉冲计数f1Tab.2 Inceptive impulse of casting in different planting frequencies
4 取苗投苗试验
4.1 试验条件
2017年4月15日,在江苏大学现代农业装备与技术省部共建教育部重点实验室试验地进行取投苗控制系统性能试验,如图7所示。试验苗为津研七号黄瓜苗,如图8所示,育苗盘选用72孔和128孔两种标准穴盘,育苗苗龄20 d,平均苗高为92.4 mm。

图7 取苗投苗性能试验Fig.7 Performance experiment photo of picking and casting

图8 试验用穴盘苗Fig.8 Tray and seedlings for experiment
4.2 试验指标与结果分析
4.2.1试验指标
依据取苗工作循环动作流程,将取苗失败率S1、投苗失败率S2、取投苗综合成功率S作为试验评价指标[20]。计算公式为
(7)
(8)
S=(1-S1-S2)×100%
(9)
式中N0——取苗总数
N1——取苗末端执行器未夹出钵苗的数目
N2——被取苗末端执行器夹出的钵苗未能成功投苗的个数
4.2.2试验结果分析
由试验结果(表3)可知,在栽植频率40~70株/min范围内,72、128孔穴盘苗的取苗投苗综合成功率均高于95%,总平均值为97.98%。当栽植频率在40株/min时,两种穴盘苗的取投苗综合成功率为99.31%和99.22%,当栽植频率提升至70 r/min时,取投苗综合成功率为95.15%和96.88%,总体上,随着栽植频率的提高,取苗失败率、投苗失败率均有所提高,而取苗投苗综合成功率有所下降,造成这一现象的主要原因是:随着栽植频率的提升,完成单次取苗工作的时间越来越短,取苗时间不变的情况下,相应投苗时间改变,苗爪未到投苗位置就投苗,导致投苗失败;同时由于取苗频率加快,相应的取苗停顿间隔缩短,夹苗稳定性降低。

表3 不同栽植速度下取苗投苗成功率
5 结论
(1)结合设计的自动移栽机械,阐述了取苗、投苗以及分苗机械系统结构及工作原理,基于PLC设计了整排取苗间隔投苗运动控制系统,该控制系统实现了整排苗钵边插边夹,完成低速高效取苗;各取苗爪的开合相互独立,针对连续运动的分苗部件实现有序间隔投苗,且适应不同穴盘及栽植频率。
(2)采用20 d苗龄的黄瓜穴盘苗为试验对象,在不同栽植频率下进行取苗、投苗性能试验,结果表明:在栽植频率40~70株/min范围内,72、128孔穴盘苗的取苗投苗综合成功率平均值为97.98%。72孔穴在栽植频率40株/min下,取投苗综合成功率达99.31%,即使将栽植频率提高到70株/min,取投苗综合成功率也能达到95.15%,证明该控制系统可行,达到了高效自动移栽目的。
1 于晓旭,赵匀,陈宝成,等.移栽机械发展现状与展望[J/OL].农业机械学报,2014,45(8):44-53.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140808&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.08.008.
YU Xiaoxu,ZHAO Yun,CHEN Baocheng,et al. Current situation and prospect of transplanter[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014,45(8):44-53. (in Chinese)
2 张敏,冯江,宫成宇,等. 全自动旱田移栽机顶出机构的机理分析[J].农机化研究,2014,36(3):85-89.
ZHANG Min, FENG Jiang, GONG Chengyu, et al. Analysis on ejector seedlings mechanism of automatic dry farmland transplanting machine[J]. Jourmal of Agricultural Mechanizationon Research, 2014,36(3): 85-89. (in Chinese)
3 韩绿化,毛罕平,严蕾,等. 穴盘育苗移栽机两指四针钳夹式取苗末端执行器[J/OL].农业机械学报,2015,46(7):23-30.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150704&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.07.004.
HAN Lühua, MAO Hanping, YAN Lei, et al. Pincette-type end-effect using two fingers and four pins for picking up seedlings[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7): 23-30. (in Chinese)
4 童俊华,蒋焕煜,蒋卓华,等. 钵苗自动移栽机器人抓取指针夹持苗坨参数优化试验[J]. 农业工程学报,2014,30(16):8-16.
TONG Junhua, JIANG Huanyu, JIANG Zhuohua, et al. Experiment on parameter optimization of gripper needles clamping seedling plug for automatic transplanter[J]. Transactions of the CSAE, 2014, 30(16): 8-16. (in Chinese)
5 俞高红,刘炳华,赵匀,等. 椭圆齿轮行星轮系蔬菜钵苗自动移栽机构运动机理分析[J]. 农业机械学报,2011,42(4):53-57.
YU Gaohong, LIU Binghua, ZHAO Yun, et al.Kinematic principle analysis of transplanting mechanism with planetary elliptic gears in automatic vegetable transplanter[J].Transactions of the Chinese Society for Agricultural Machinery,2011,42(4): 53-57. (in Chinese)
6 王蒙蒙,宋建农,刘彩玲,等. 蔬菜移栽机曲柄摆杆式夹苗机构的设计与试验[J].农业工程学报,2015,31(14):49-57.
WANG Mengmeng, SONG Jiannong, LIU Cailing,et al. Design and experiment of crank rocker type clamp seedlings mechanism of vegetable transplanter[J]. Transactions of the CSAE,2015, 31(14): 49-57. (in Chinese)
7 韩长杰,郭辉,张学军,等. 硬质穴盘苗自动取苗装置设计[J]. 农业工程,2013,3(4):99-102.
HAN Changjie,GUO Hui, ZHANG Xuejun, et al. Design of automatic hard-plug-seedlings pick device[J]. Agricultural Engineering, 2013,3(4): 99-102.(in Chinese)
8 韩长杰,杨宛章,张学军,等.穴盘苗移栽机自动取喂系统的设计与试验[J]. 农业工程学报,2013,29(8):51-61.
HAN Changjie, YANG Wanzhang, ZHANG Xuejun, et al. Design and test of automatic feed system for tray seedlings transplanter[J]. Transactions of the CSAE,2013, 29(8):51-61. (in Chinese)
9 吴俭敏,颜华,金鑫,等. 移栽机送盘装置与定位控制系统研究[J/OL]. 农业机械学报,2013,44(增刊1):14-18. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2013s103&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.S1.003.
WU Jianmin,YAN Hua,JIN Xin,et al.Research on disk conveying device and positioning control system for transplanter[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(Supp.1):14-18. (in Chinese)
10 魏新华,包盛,刘晓凯,等. 穴盘苗全自动移栽机运动协调控制系统设计与移栽试验[J/OL]. 农业机械学报,2016,47(12):1-7,52. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20161201&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.12.001.
WEI Xinhua,BAO Sheng,LIU Xiaokai,et al. Design and experiment on potted-seedling automatic transplanter control system for motion coordinating[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2016,47(12):1-7,52. (in Chinese)
11 严宵月,胡建平,吴福华,等. 整排取苗间隔放苗移栽机设计与试验[J/OL]. 农业机械学报,2013,44(增刊1):7-13.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2013s102&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2013.S1.002.
YAN Xiaoyue, HU Jianping, WU Fuhua,et al.Design and experiment of full-row-pick-up and single-dropping seedling [J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2013,44(Supp.1):7-13. (in Chinese)
12 江苏大学.旱地移栽机整排取苗间隔放苗装置: CN102342206A[P].2012-02-08.
13 郭林强. 穴盘苗全自动移栽机气动取苗装置的设计与试验[D].镇江:江苏大学,2016.
GUO Linqiang.Design and test on the pneumatic taking seedling mechanism of auto-transplanter[D].Zhenjiang:Jiangsu University,2016. (in Chinese)
14 KUMAR G V P, RAHEMAN H.Development of a walk-behind type hand tractor powered vegetable transplanter for paper pot seedlings[J]. Biosystems Engineering,2011,110(2):189-197.
15 王侨,曹卫彬,张振国,等.穴盘苗自动取苗机构的自适应模糊PID定位控制[J]. 农业工程学报,2013,29(12):32-39.
WANG Qiao, CAO Weibin,ZHANG Zhenguo,et al. Location control of automatic pick-up plug seedlings mechanism based on adaptive fuzzy-PID[J]. Transactions of the CSAE, 2013, 29(12):32-39. (in Chinese)
16 杨丽红. 蔬菜钵苗全自动移栽机控制系统设计及研究[D].镇江:江苏大学,2017.
YANG Lihong. Design and analysis of control system of automatic vegetable transplanting machine[D].Zhenjiang:Jiangsu University,2017.(in Chinese)
17 田素博,邱立春,张诗.基于PLC的穴盘苗移栽机械手控制系统设计[J].沈阳农业大学学报, 2007,38(1): 122-124.
TIAN Subo,QIU Lichun,ZHANG Shi.Control system of transplanting potted seedling manipulator based on PLC[J].Journal of Shenyang Agricultural University,2007,38(1): 122-124.(in Chinese)
18 倪有亮,金诚谦,刘基. 全自动移栽机取送苗系统的设计与试验[J]. 农业工程学报,2015,31(23):10-19.
NI Youliang, JIN Chengqian, LIU Ji. Design and experiment of system for picking up and delivering seedlings in automatic transplanter[J].Transactions of the CSAE, 2015, 31(23): 10-19. (in Chinese)
19 王小祥.增量式旋转编码器的简介与应用[J].数字技术与应用,2016(10):118-119.
20 胡敏娟,尹文庆,胡飞,等. 穴盘苗自动取苗试验系统的研制[J]. 南京农业大学学报,2011,34(3):122-126.
HU Minjuan, YIN Wenqing, HU Fei, et al. Development of test system for automatic pick-up plug seedlings[J].Journal of Nanjing Agricultural University, 2011, 34(3):122-126. (in Chinese)
