玉米播种单体下压力控制系统设计与试验
2018-07-05付卫强董建军梅鹤波高娜娜卢彩云张俊雄
付卫强 董建军 梅鹤波 高娜娜 卢彩云 张俊雄
(1.中国农业大学工学院, 北京 100083; 2.北京农业智能装备技术研究中心, 北京 100097)
0 引言
播种深度作为玉米播种机播种作业质量的重要指标之一,对玉米产量有非常大的影响[1-2]。播种深度一致性差,会影响出苗整齐度,降低群体密度和整齐度,致使玉米植株在群体内所处的温度、光照等环境条件不一致,进而影响玉米果穗数和植株干物质的积累,最终造成产量降低[3-10]。免耕播种农田有残茬、秸秆、杂草等覆盖,而且土壤紧实度大且不一致,机械式仿形压力调节机构虽然可以根据经验调节弹簧位置来进行播种单体下压力调节,来获得较好的播种深度一致性,但难以与土壤实际条件匹配,从而影响出苗及根系发育;最重要的是不能实时检测仿形轮对农田地表压力并进行自动调节。而主动作用式仿形技术作为一种提高播种深度一致性的重要技术,能实现理想的播种深度一致性和合理的土壤压实度,该项技术已成为玉米精密播种技术的重点研究内容之一[11-12]。
国外学者对主动作用式仿形技术研究始于20世纪70年代[13]。JENSEN等[14]提出了一种播种深度一致性控制方法:控制器实时采集负载传感器检测到的限深轮负载,通过与设定值进行比较计算后驱动调节阀调节驱动装置在播种单体上施加的向下压力,从而使开沟深度保持在设定值。WEATHERLY等[15]设计了基于电液比例技术的播种深度控制系统以迅速检测播前地表的起伏情况,保证播种深度一致性并提高种子的发芽率。SUOMI等[16]研发了一种符合ISO 11783标准的播种深度自动控制系统。国外播种机生产厂商与精准农业技术产品生产商研发了播种单体下压力调节系统来提高播种深度一致性。例如美国的Precision Planting、AgLeader、John Deere、Dawn Equipment等公司均相应研制了下压力控制技术产品[17-22]。
国内学者对主动作用式仿形技术的研究始于2009年[23]。中国农业大学李洪文等[24]设计了一种应用于播种深度自控系统的调节装置。温丽萍等[25-26]采用超声波传感器设计了一种电液自动仿形控制系统,实现精密播种机单体仿形开沟和播种深度的自动控制。赵金辉等[27]设计了基于位移传感器的播种机开沟深度控制系统。文献[28-30]提出了一种基于压电薄膜的免耕播种机播种深度控制系统,控制空气弹簧产生的推力使播种单体与地表间保持足够压力,从而保证播种深度的稳定性。
国内的研究多采用超声传感器、压电传感器、位移传感器,可靠性不高,通用性不强。鉴于此,本文开展主动式播种深度一致性控制方法研究,研制基于力反馈的玉米播种单体下压力控制系统,提高系统的可靠性和通用性。
1 玉米播种单体下压力控制系统设计
1.1 系统组成与工作原理
下压力控制系统由平行四连杆、下压液压缸、液压阀组、下压力感知传感器、控制器、车载计算机等组成(图1)。其工作流程如下:在播种作业前通过车载计算机设置下压力感知传感器目标阈值,并将目标阈值发送到控制器。在播种作业开始时,车载计算机发送启动指令到控制器。在播种作业过程中,控制器实时采集下压力感知传感器信息,与设定的下压力感知传感器目标阈值相比较,计算并输出控制量到液压阀组驱动液压缸实时调整平行四连杆仿形机构,使限深轮与地表的压力在设定的阈值区间内,从而提高开沟深度的稳定性,进而保证播种深度的稳定性。
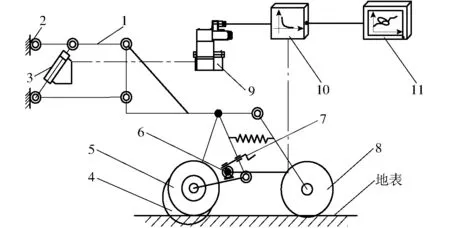
图1 下压力控制系统示意图Fig.1 Sketch of downforce control system1.平行四连杆 2.机架 3.下压液压缸 4.开沟盘 5.限深轮 6.下压力感知传感器 7.限深轮调节装置 8.镇压轮 9.液压阀组 10.控制器 11.车载计算机
1.2 系统硬件设计
本研究基于现代农装科技股份有限公司生产的2BQX-6型玉米免耕精密播种机展开。
1.2.1下压力检测装置设计
1.2.1.1下压力感知传感器安装方式设计
下压力感知传感器是播种单体下压力控制实现的关键。如图2所示,限深轮限位销轴是一个限位轴,自身不转动,受力稳定,只受垂直于限深轮摆臂方向的反作用力,通过销轴受力分析能够清晰地推导出地表对限深轮垂直方向的反作用力。因此传感器设计成销轴形式,直接替换限深轮限位销轴,提高系统的通用性。

图2 限深轮限位销轴位置Fig.2 Depth wheel limit pin position
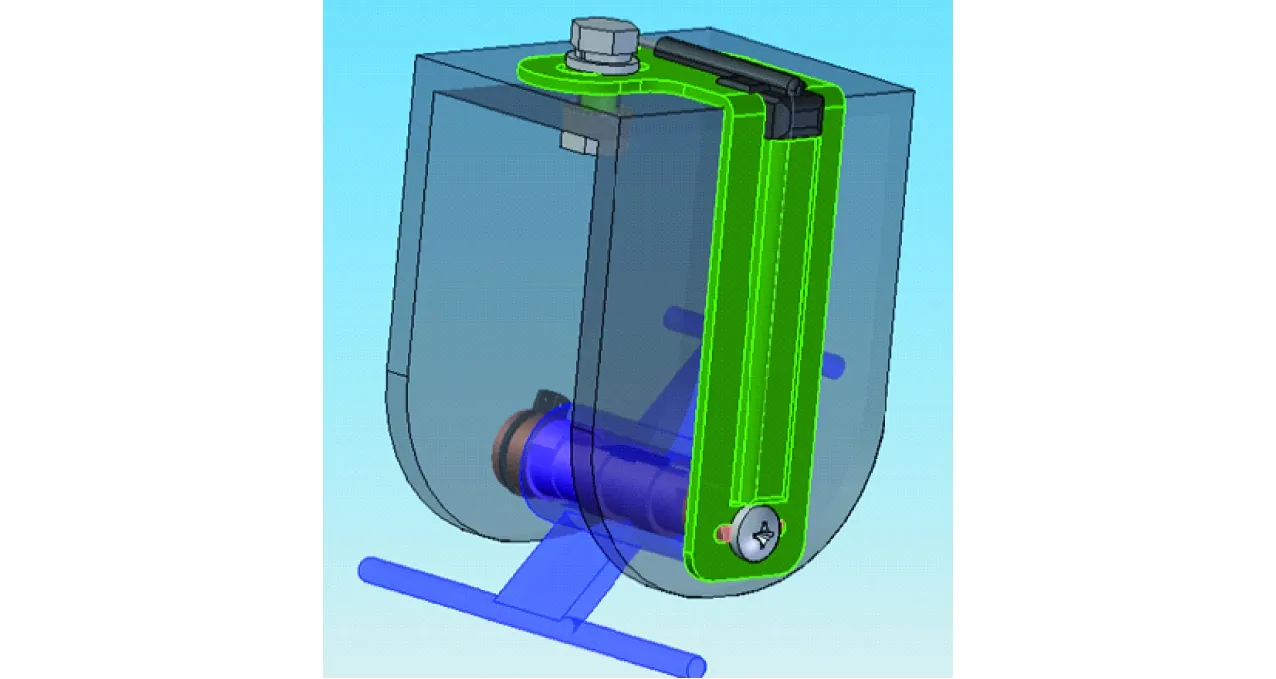
图3 下压力感知传感器的安装方式Fig.3 Mounting design of downforce sensor
如图3所示,采用轴销式力传感器代替限深轮限位销轴,力传感器的一端与传感器固定板用螺栓紧固,另外一端穿过限位块销轴孔用卡簧固定,传感器固定板通过螺栓固定在机架固定孔上。传感器固定板主要用来防止传感器轴向窜动和转动,保持传感器受力点不变,便于精确地采集地表对限深轮垂直方向的反作用力。
1.2.1.2传感器量程计算
玉米播种单体质量mc取值150 kg。在播种作业过程中,播种单体受到地表反作用力。由于微地形变化导致播种单体产生振动,致使下压力感知传感器受到播种单体的冲力。假设下压力感知传感器受到的冲力为播种单体质量的n倍,则下压力感知传感器的量程Frang为
Frang=(1+n)mcgKsafe
(1)
式中mc——玉米播种单体质量,kg
g——重力加速度,9.8 m/s2
Ksafe——安全系数
按一般工程经验n取2,安全系数Ksafe取1.5,则取整后,下压力感知传感器量程Frang为7 000 N。
1.2.1.3下压力感知传感器结构设计
受制于销轴尺寸限制,下压力感知传感器外径Φ取14 mm。根据受力方向和安装环境以及固定方式,设计轴销式力传感器。下压力感知传感器机械强度通过MSC Nastran软件进行仿真校核。下压力感知传感器仿真模型选取材料为40Cr调质,其左端固定,右端铰接,中间两圆凸处始加7 000 N的力载荷,划分41 951个四面体网格进行求解计算,结果如图4所示。仿真结果表明,模型受到的最大应力为524 000 kPa,小于材料的屈服应力735 000 kPa,最小安全系数为1.4,满足试验要求。
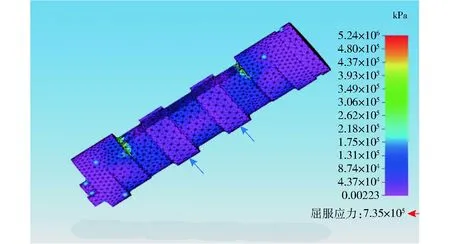
图4 下压力感知传感器应力分析图Fig.4 Spacer pin of depth roller
下压力感知传感器根据外形尺寸以及量程等参数由蚌埠众诚传感器有限公司定做,型号为ZHZX-N13,量程7 000 N,输出电压范围0 ~ 5 V,工作电压9~36 V DC。将下压力感知传感器分别安装固定在2BQX-6型玉米免耕精密播种机单体上,实际安装效果如图5所示。
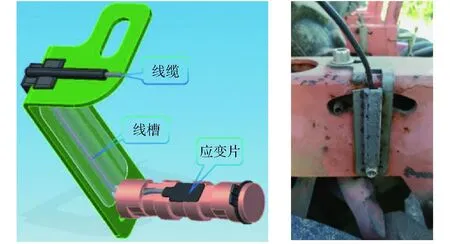
图5 下压力感知传感器总成与安装Fig.5 Assembly and mounting of downforce sensor
1.2.1.4下压力信号采集设备
下压力感知传感器与数据采集器连接,数据采集器将下压力感知传感器输出值发送到CAN总线上。通过广州致远电子有限公司的USBCAN-Ⅱ模块将CAN总线数据发送到车载计算机,采用ZLGCAN Test软件记录下压力感知传感器测量值。
数据采集器采用北京凯商公司的C101控制器,主要参数:6路PWM功率输出,2路CAN总线接口,8路量程0~5 V DC的10 bit模拟量输入接口,工作电压(12/24±1)V DC;编程环境为OpenPCS, 结合SFC语言结构清晰与ST语言灵活的优势进行混合编程。车载计算机采用新汉VMC1000型车载计算机,具有7英寸触摸屏,2路RS232接口,1路CAN总线接口,工作电压9~36 V DC;操作系统为Windows XP Embedded。
1.2.1.5下压力感知传感器数据处理
试验前,将播种机停放在试验地块上,拖拉机三点悬挂处于悬浮状态。旋转试验用播种单体播种深度调节手柄来调节力传感器预紧力,使预紧力保持在20~40 N之间。拖拉机作业速度8~9 km/h。由于轴销式力传感器与限深轮为刚性接触,免耕播种地表情况复杂,传感器输出值波动比较大,不能反映下压力的实际大小。因此需要对力传感器输出信号进行滤波处理。下压力数据曲线如图6所示。
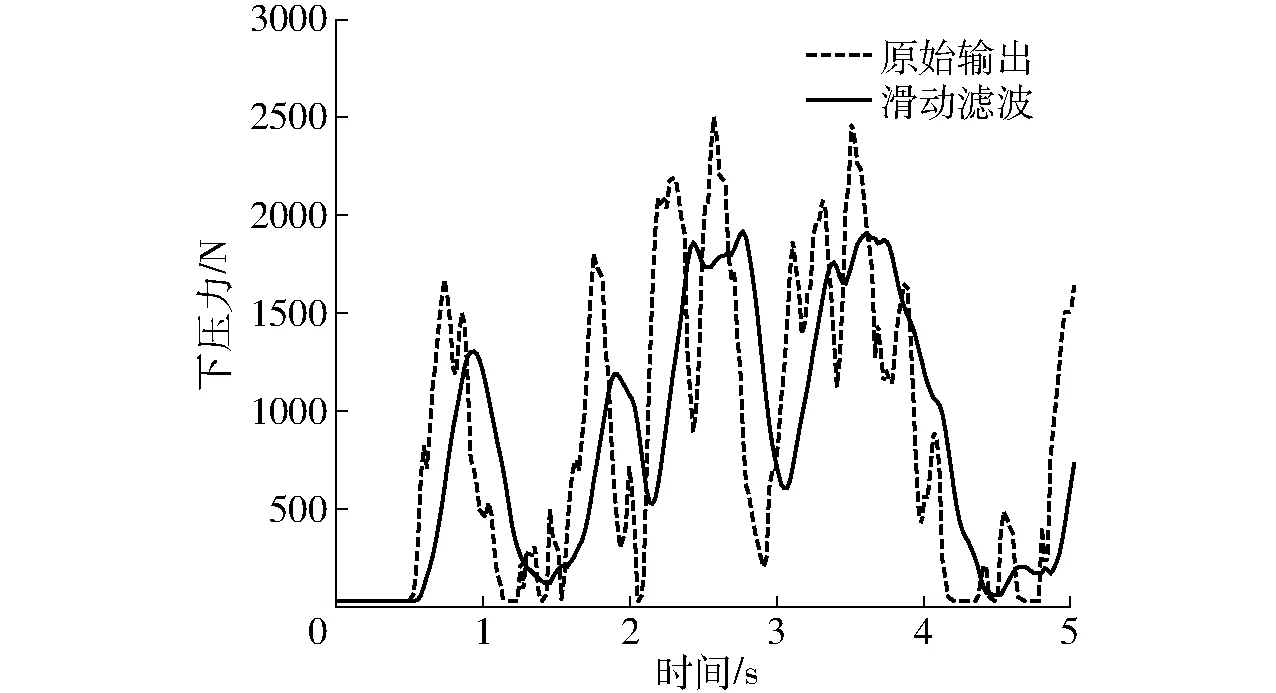
图6 下压力感知传感器输出信号曲线Fig.6 Output curves of downforce sensor
由图6可知,下压力传感器原始数据值波动比较大,无法直接用于下压力控制。采用滑动平均滤波算法对传感器原始数据滤波后,下压力曲线较为平滑,对播种机振动干扰抑制效果明显,可以进行作业控制。
1.2.2液压缸选型
2BQX-6型玉米免耕精密播种机播种单体约为150 kg。参照播种单体质量,选取下压液压缸油缸的型号为HSG 20/40-100,液压缸无杆腔内径D为40 mm,液压缸活塞杆直径d为20 mm。液压系统额定压力ps取10 MPa,则下压液压缸产生的最大举升力Fumax为12.57 kN。下压液压缸产生的举升力完全可以提升播种单体。下压液压缸安装位置如图7所示。
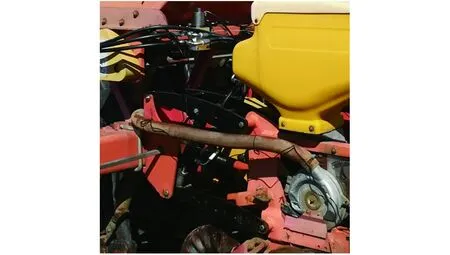
图7 下压液压缸安装位置Fig.7 Mounting position of hydraulic cylinder
1.2.3液压部分设计
液压部分由比例减压阀、下压液压缸、电磁阀、溢流阀、单向阀等组成。液压原理图见图8。电磁阀电磁铁得电后系统可以正常工作。此时:
(1)比例减压阀U电磁铁和比例减压阀A、B、C均不得电,播种单体A、B、C均不动作。
(2)比例减压阀U电磁铁得电,比例减压阀A、B、C不得电,下压液压缸A、B、C活塞伸出使播种单体A、B、C提升。
(3)比例减压阀U电磁铁不得电,比例减压阀A、B、C分别得电,从而分别控制对应下压液压缸活塞收回,播种单体下降。
(4)比例减压阀U电磁铁得电,比例减压阀A、B、C分别得电,由于播种单体自重原因,播种单体不动作。
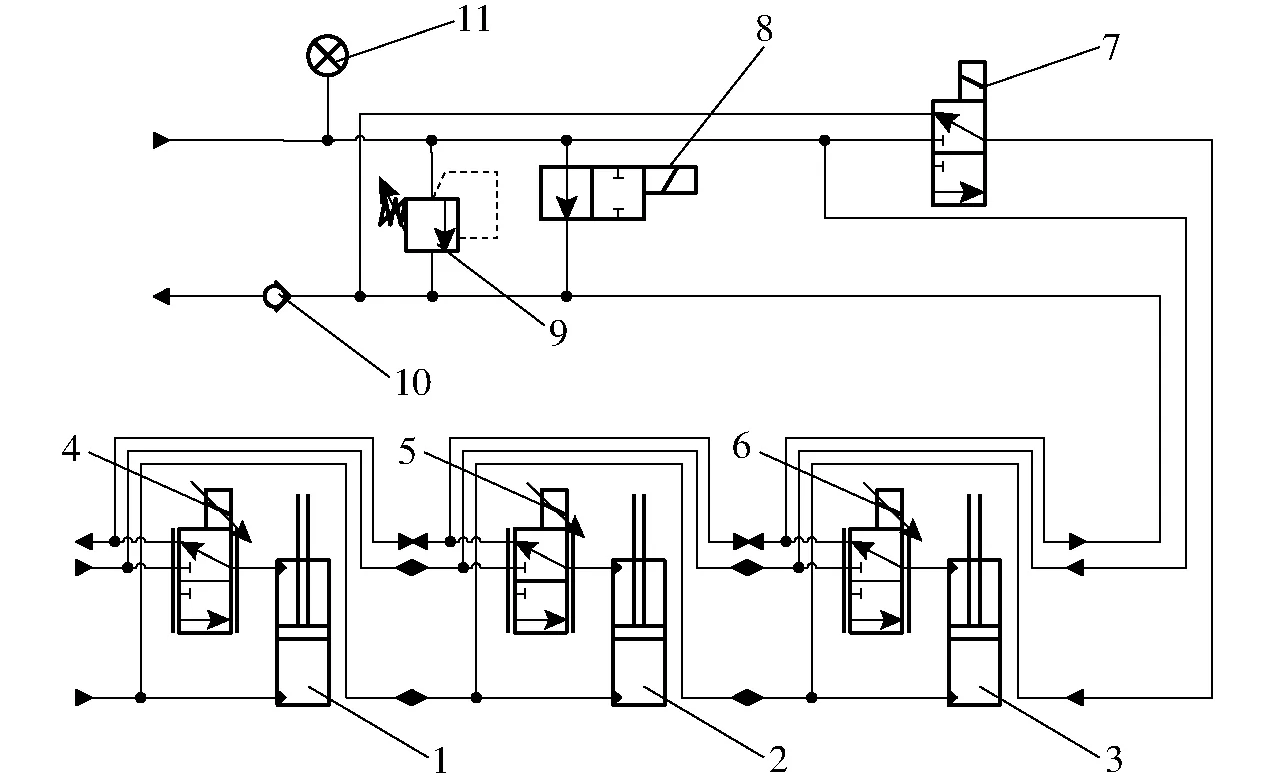
图8 下压力控制系统液压原理图Fig.8 Hydraulic schematic of downforce control system1.下压液压缸A 2.下压液压缸B 3.下压液压缸C 4.比例减压阀A 5.比例减压阀B 6.比例减压阀C 7.比例减压阀U 8.电磁阀 9.溢流阀 10.单向阀 11.油压传感器
系统油源直接采用拖拉机后液压输出。国产60~67 kW拖拉机后液压输出额定流量一般为38 L/min,额定工作压力12 MPa,安全工作压力15 MPa。因此,比例减压阀采用美国HydraForce公司型号为TS90-31的内部先导式比例减压/溢流阀,额定流量38 L/min,最大先导流量0.85 L/min,可调节压力范围0 ~ 13.8 MPa;选用12VDC E型比例电磁铁[31]。
1.2.4电控部分设计
电控部分由控制器、下压力感知传感器和车载计算机组成。其工作流程如图9,具体如下:车载计算机通过CAN总线将设置的下压力感知传感器目标阈值发送到控制器;车载计算机发送启动指令到控制器,控制器实时采集下压力感知传感器信息,与设定的下压力感知传感器目标阈值相比较,计算并输出控制量到液压阀组驱动液压缸动作。
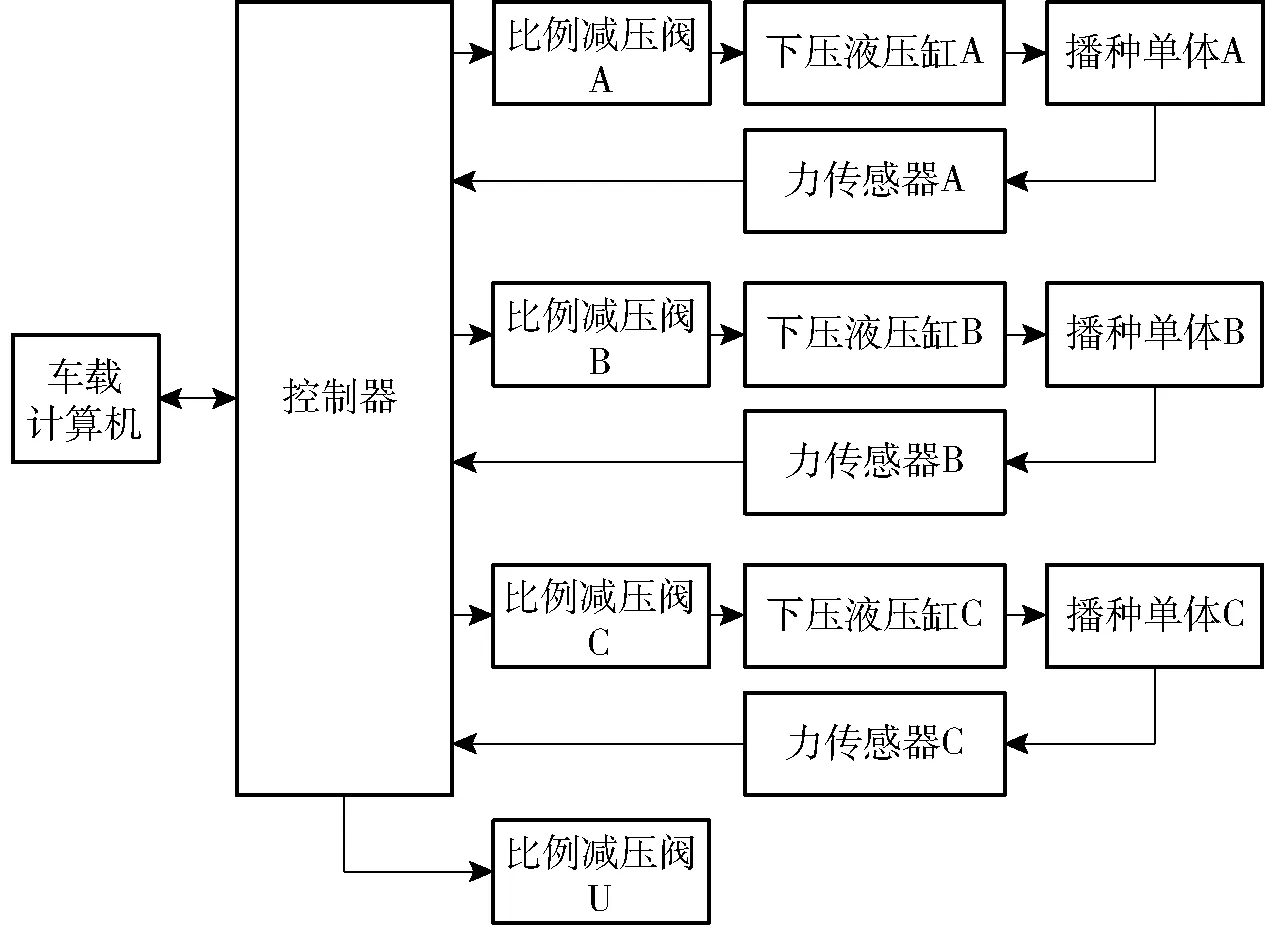
图9 电控系统原理框图Fig.9 Schematic diagram of control system
1.3 下压力控制系统软件设计
1.3.1控制器软件设计
下压力控制系统控制器同时控制多个播种单体,仅以单个播种单体控制流程为例进行说明。播种深度一致性控制器软件工作流程如下(图10):
(1)系统初始化。
(2)读取CAN总线消息,判断是否为下压液压缸控制指令。若为下压液压缸控制指令,解析控制指令,控制下压液压缸上升、下降或停止,发送响应下压液压缸控制指令到CAN总线上。
(3)判断是否为下压力参数设置指令。若为下压力参数设置指令,解析控制指令,设置下压力目标值、目标值上限值、目标值下限值,发送响应下压力参数设置指令到CAN总线上。
(4)判断是否为下压力控制启停指令。若为下压力控制启停指令,解析控制指令,设置下压力启停标志位为对应值,发送响应下压力控制启停指令到CAN总线上。
(5)读取下压力感知传感器值和油液压力值,发送当前值到CAN总线上。
(6)判断下压力启停标志位,若为“启动”,运行播种深度稳定性控制算法,计算控制量并输出到控制器功率输出。否则控制器功率输出设置为零。
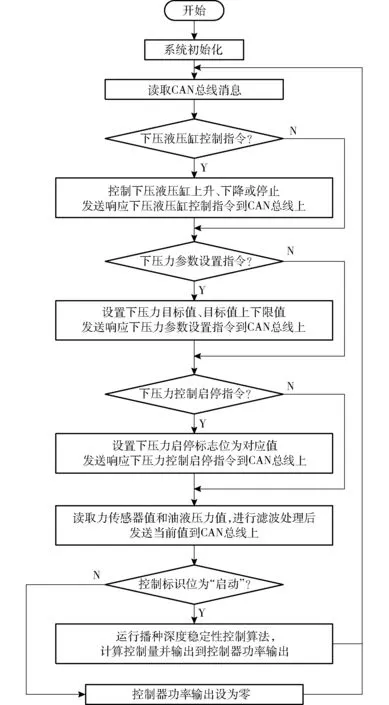
图10 控制器工作流程图Fig.10 Flow chart of controller
1.3.2车载计算机软件设计
车载计算机软件主要是实现人机交互,其软件界面如图11所示。

图11 软件界面Fig.11 Software interface of control system
1.4 下压力控制系统性能测试
将控制器、液压阀组固定在2BQX-6型玉米免耕精密播种机机架上,将力传感器、下压液压缸安装固定在播种单体上,将车载计算机安装在纽荷兰SNH904型牵引拖拉机上。播种单体下压力控制系统液压系统与拖拉机后液压输出连接。车载计算机与控制器通过CAN总线连接。试验时,将广州致远电子有限公司的USBCAN数据采集模块连接到播种单体下压力控制系统CAN总线上,通过ZLGCANTest 软件记录车载计算机发送的控制指令和控制器上报的数据。试验前,将播种机停放在试验地块上,拖拉机三点悬挂处于悬浮状态。旋转试验用播种单体播种深度调节手柄来调节力传感器预紧力,使预紧力保持在(2 500±10) N之间。
1.4.1系统性能阶跃响应测试
选取目标下压力4 000 N进行阶跃响应测试试验。从阶跃响应曲线(图12)可以看出,系统延迟时间0.34 s,上升时间0.10 s,峰值时间0.68 s,调节时间1.78 s,超调量13.33%,控制误差2.33%,能满足一般控制系统控制精度要求。
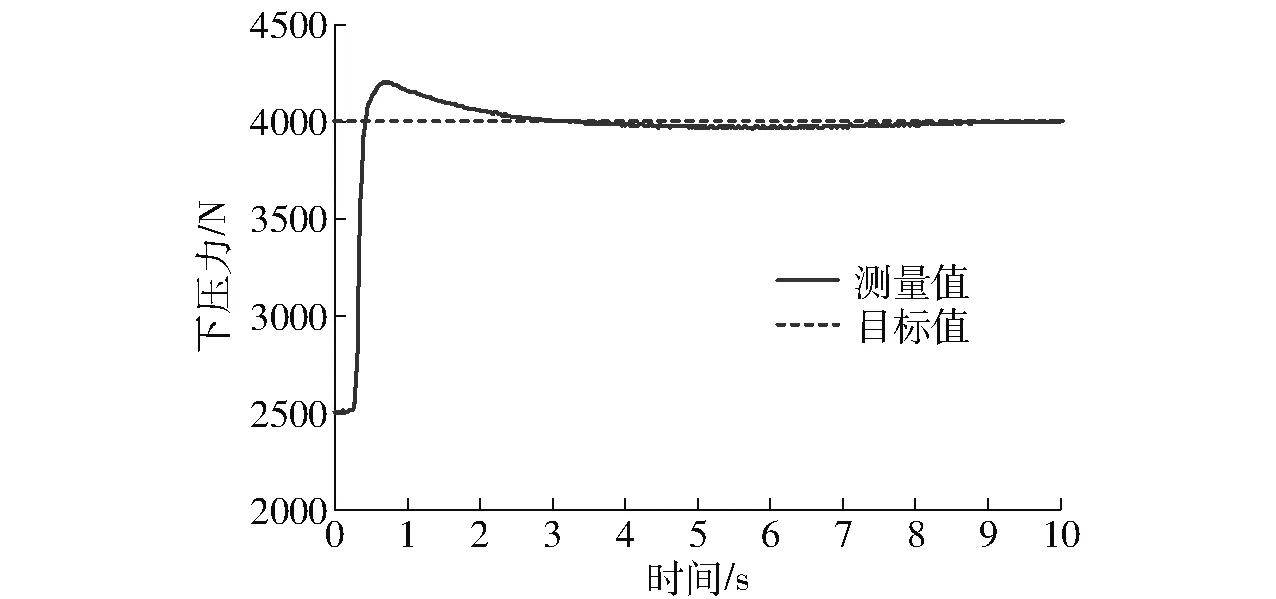
图12 下压力控制系统阶跃响应曲线Fig.12 Step response curves of downforce control system
1.4.2系统性能田间动态测试
选取目标下压力4 000 N分别进行正常作业速度下(5~7 km/h)下压力控制系统田间测试。图13为测试曲线。

图13 正常作业速度下力传感器输出曲线Fig.13 Output curves of force sensor at normal operating speed
从图13可以看出,在播种作业过程中,因地表地形变化等因素影响导致播种单体有向上跳动的趋势。但是,下压力与目标下压力值相一致,表明限深轮保持与地表紧密接触,播种深度受地形变化影响很小。
对图13曲线数据进行分析可以得出:滤波处理前,传感器输出平均值、标准差和变异系数分别为4 007.5 N、534.4 N、13.34%;滤波处理后,传感器输出平均值、标准差和变异系数分别为4 004.8 N、382.0 N、9.54%。采用滑动平均滤波算法对传感器原始数据滤波后,下压力曲线较为平滑,对播种机振动干扰抑制效果明显。
2 田间试验方法
2.1 播种深度合格率
黄淮海地区夏玉米高产栽培农艺要求玉米播种深度一般为5~6 cm,墒情较好的粘土地一般为4~5 cm。本试验按照农艺要求,玉米播种深度预设值为5.0 cm,即播种深度理论值h为5.0 cm。根据农业行业标准NY/T 1768—2009《免耕播种机 质量评价技术规范》中规定,本试验玉米单粒播种深度是否合格的判定标准为h±1.0 cm,即播种深度在4~6 cm之间即为合格。
测试小区长度为4 m,每行选5个测点,在测试小区内均布。在测试点上,垂直切开土层,测定最上层种子的覆土层厚度。
播种深度合格率计算公式为
(2)
式中H——玉米播种深度合格率,%
h1——播种深度合格点数
h0——测定总点数
2.2 播种深度一致性变异系数
播种深度测量值平均值计算公式为
(3)
hi——玉米播种深度测量值,cm
播种深度标准差Sh计算公式为
(4)
式中Sh——播种深度标准差,cm
播种深度一致性变异系数Vh公式为
(5)
式中Vh——播种深度一致性变异系数,%
2.3 播种深度分布情况分析方法
试验测得播种深度不同测量值hi,以0.1倍理论播深h为间隔分成区段,在h周围可得到区段[0.9h,h];[h,1.1h];等等。
相对频率计算公式为
(6)
式中Fi——相对频率,%
ni——播深hi在不同区段出现的频率
以播种深度测量值hi为横坐标,相对频率Fi为纵坐标绘制频率直方图进行分析。
3 试验结果与分析
田间试验在北京市昌平区小汤山国家精准农业研究示范基地进行。图14为玉米播种单体下压力控制系统田间试验场景。试验前,调整限深轮使播种深度设定在5 cm。镇压轮镇压力控制机构共有5个挡位,试验时均调整到第2个挡位。作业速度采用车载计算机内置GPS模块测量,测量精度0.1 m/s,输出频率1 Hz。计算试验时的平均值作为作业速度。

图14 下压力控制系统田间试验Fig.14 Field test of downforce control system
试验分为土壤低紧实度与高紧实度两种工况。试验在1号地和2号地2个地块进行。试验前每个地块选取10个测量点,采用浙江托普仪器有限公司的TJSD-750-IV型土壤紧实度测量仪测定每个点位在土壤表面以下5 cm的土壤紧实度。土壤紧实度仪主要参数为测量深度0~375 mm,最大负荷10 000 kPa,分辨率0.1 kPa,测量精度±1%。土壤紧实度测量数据见表1。
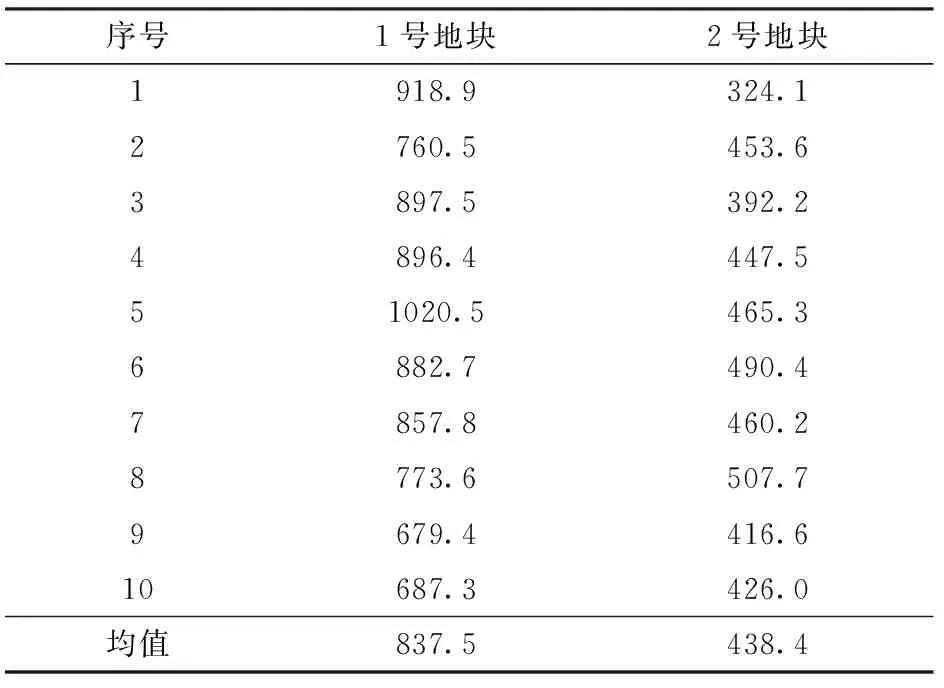
表1 土壤紧实度数据Tab.1 Soil compaction data kPa
3.1 不同作业速度下播种深度一致性试验
在1号地块进行下压力电控系统效果测试,除作业速度外,其他参数保持不变。作业速度选低速段(3~4 km/h)、中速段(5~7 km/h)和高速段(8~12 km/h)3个速度段。试验分别重复3次,试验数据见表2。可以看出,下压力电控系统的播种深度合格率最小值为88.89%,满足行业标准中播种深度合格率大于等于75%的规定。
由表2可以计算得出,低、中、高3种播种作业速度下播种深度合格率均值分别为94.07%、91.11%、90.37%,不同作业速度下播种深度合格率均值差异不大于3.70个百分点,随作业速度的增加而略有降低。低、中、高3种播种作业速度下播种深度变异系数均值分别为10.33%、12.34%、13.73%,不同作业速度下播种深度变异系数差异不大于3.40个百分点,会随作业速度的增加而略有增大。
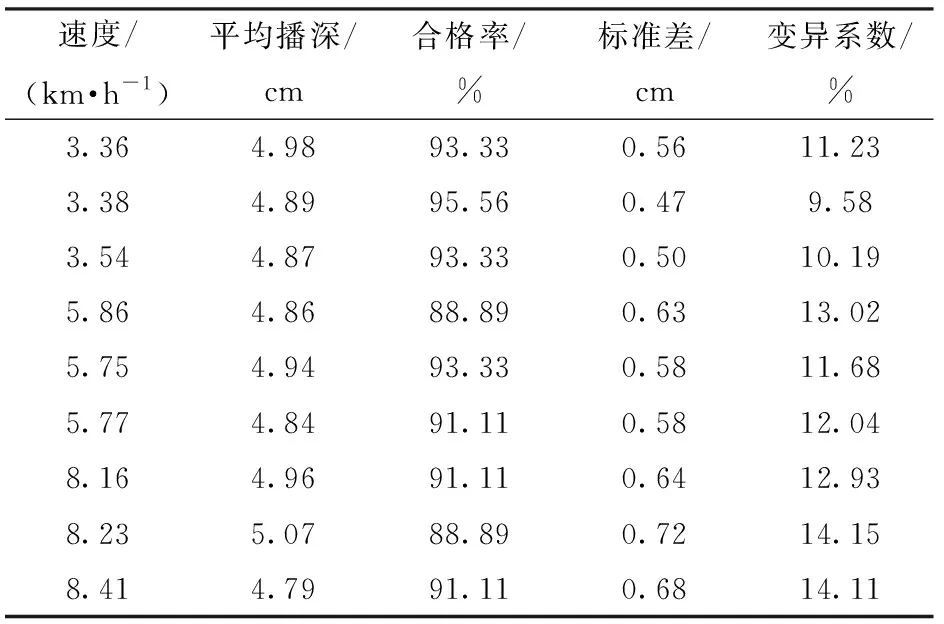
表2 不同作业速度下播种深度一致性试验数据Tab.2 Test result of consistency of seeding depth at different sowing speeds
由此可以得出,作业速度对电控系统性能影响不大,但随作业速度的增加而略有降低。
3.2 不同土壤紧实度下播种深度一致性试验
分别在1号地块和2号地块进行下压力电控系统效果影响的测试。所有参数保持不变。作业速度3~4 km/h,试验分别重复3次,试验数据见表3。从表3可以看出,下压力电控系统的播种深度合格率最小值为93.33%,满足行业标准中播种深度合格率大于等于75%的规定。
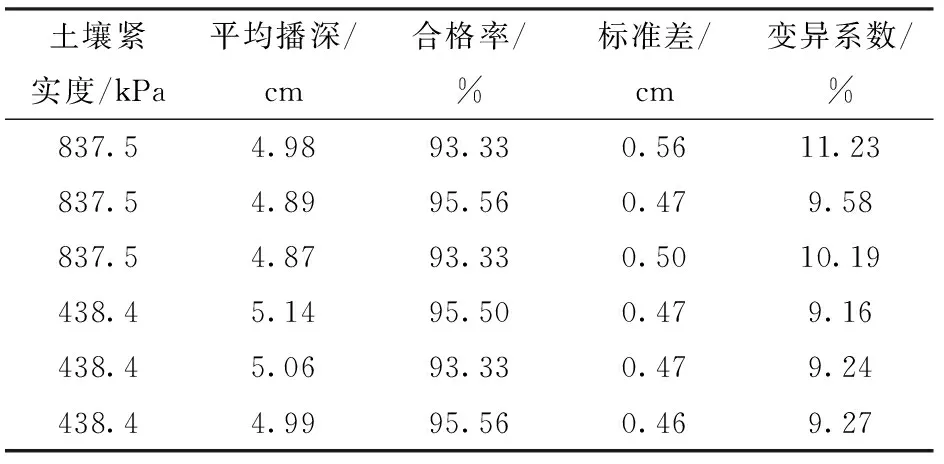
表3 不同土壤紧实度下播深一致性试验数据Tab.3 Test result of consistency of seeding depth under different soil compactions
由表3可以计算得出,1号地块和2号地块的播种深度合格率均值分别为94.07%和94.79%。不同土壤紧实度下播深合格率均值差异不大于0.72 个百分点,随地块紧实度的增大而略有降低。1号地块和2号地块的播深变异系数均值分别为10.33%、9.22%,不同土壤紧实度下播种深度变异系数差异不大于1.11 个百分点,随土壤紧实度的增大而略有增加。
由此可以得出,土壤紧实度对下压力电控系统性能影响不大,但是会随土壤紧实度的增加而略有降低。
3.3 不同下压力控制方式播种深度一致性试验
下压力电控系统性能测试试验表明,播种深度合格率高于行业标准要求。为了更好地验证系统性能,在1号地块进行了下压力电控式与机械调节方式的对比试验。在此试验中,除了下压力控制装置外,其他参数保持一致。作业速度8~9 km/h,播深预设值5 cm。机械调节与电控调节分别重复3次,试验数据见表4。
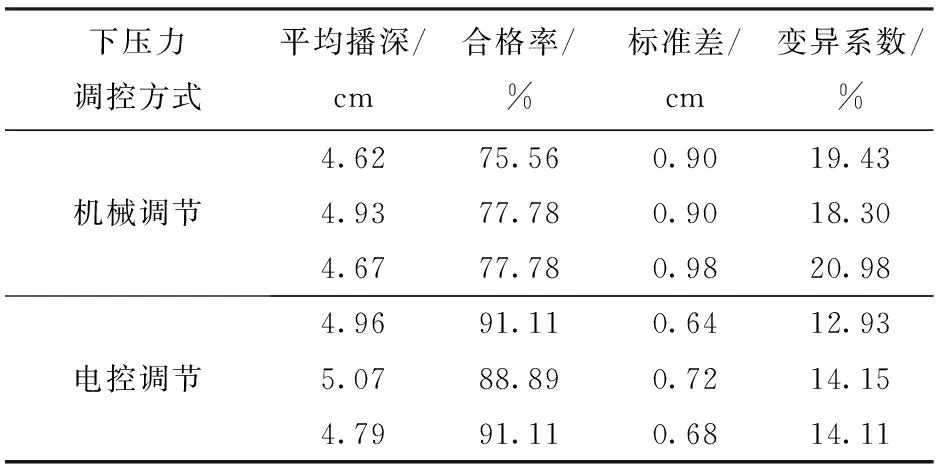
表4 不同下压力控制方式播深一致性对比试验数据Tab.4 Comparison of consistency of seeding depth by different downforce control methods
从表4可以看出,两种下压力调控方式正常播种的播种深度合格率的最小值分别为75.56%和88.89%,满足行业标准中播种深度合格率大于等于75%的规定。由表4可以计算得出,下压力机械调控方式和电控调控方式下的播种深度合格率均值分别为77.04%和90.37%。电控调节方式下的播种深度合格率均值比机械调控方式高13.33个百分点。机械调节方式和电控调节方式下的播种深度变异系数均值分别为19.57%、13.73%。下压力电控调节方式下的播种深度变异系数比机械式低5.84个百分点。
由此可以得出,下压力电控系统的播种深度一致性明显优于机械调节方式,且变异系数明显低于机械调节方式。从图15可以看出,下压力电控系统对提高播种质量有重要作用。
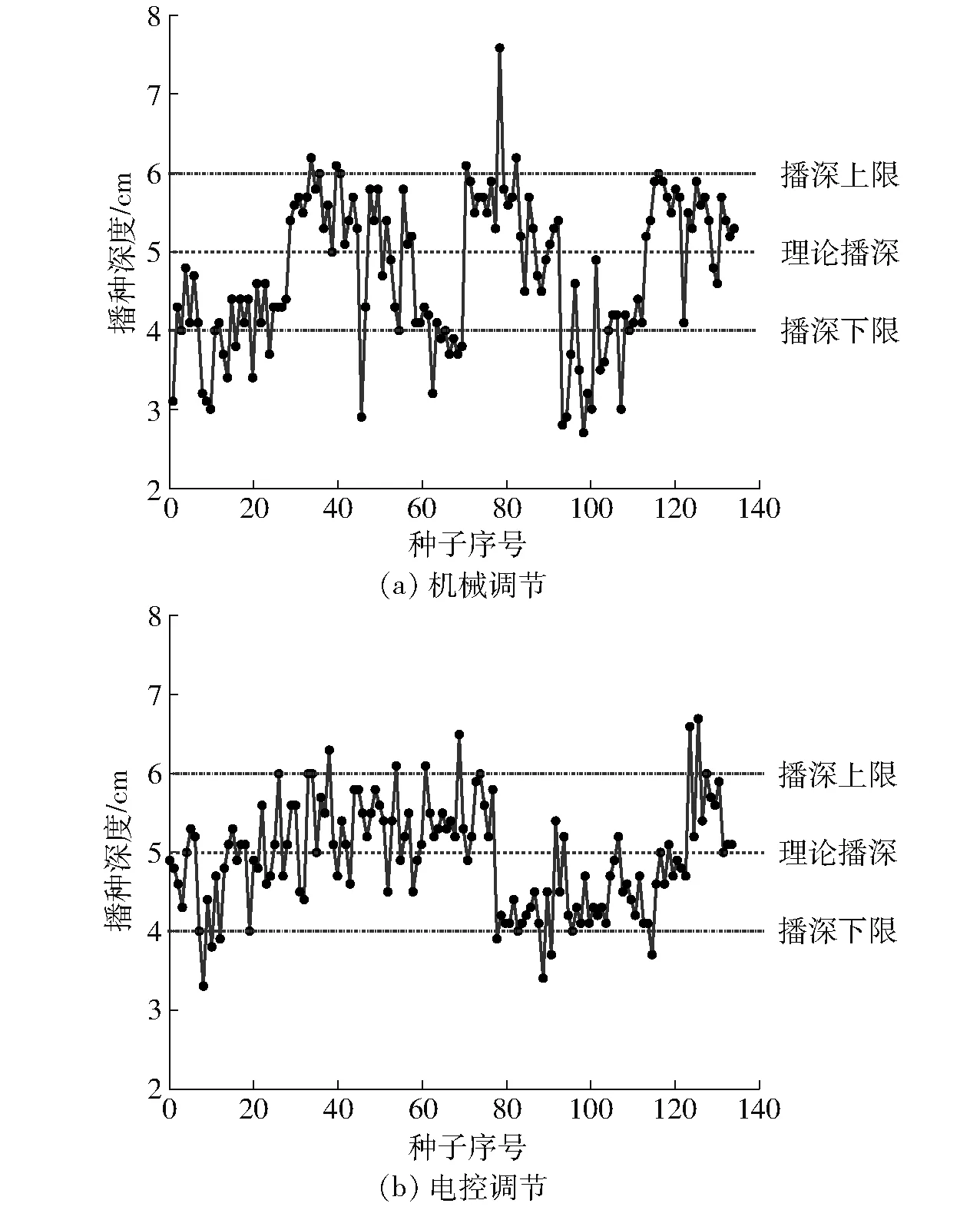
图15 下压力不同调节方式播种深度分布图Fig.15 Sowing depth distribution with different downforce adjustment methods
3.4 试验结果分析
由图16可以看出,下压力机械调节方式和下压力电控调节方式进行正常播种的播种深度合格率均值分别为77.04%和90.37%。将播种深度合格的判定标准提高至±0.5 cm,即播种深度在4.5~5.5 cm之间为合格,则相应的播种深度合格率分别下降为31.11%和56.30%。下压力控制装置的播种深度合格率比机械调节方式高25.19个百分点。可见,下压力电控系统能保持种子播种深度的稳定性,提高种子深度一致性。
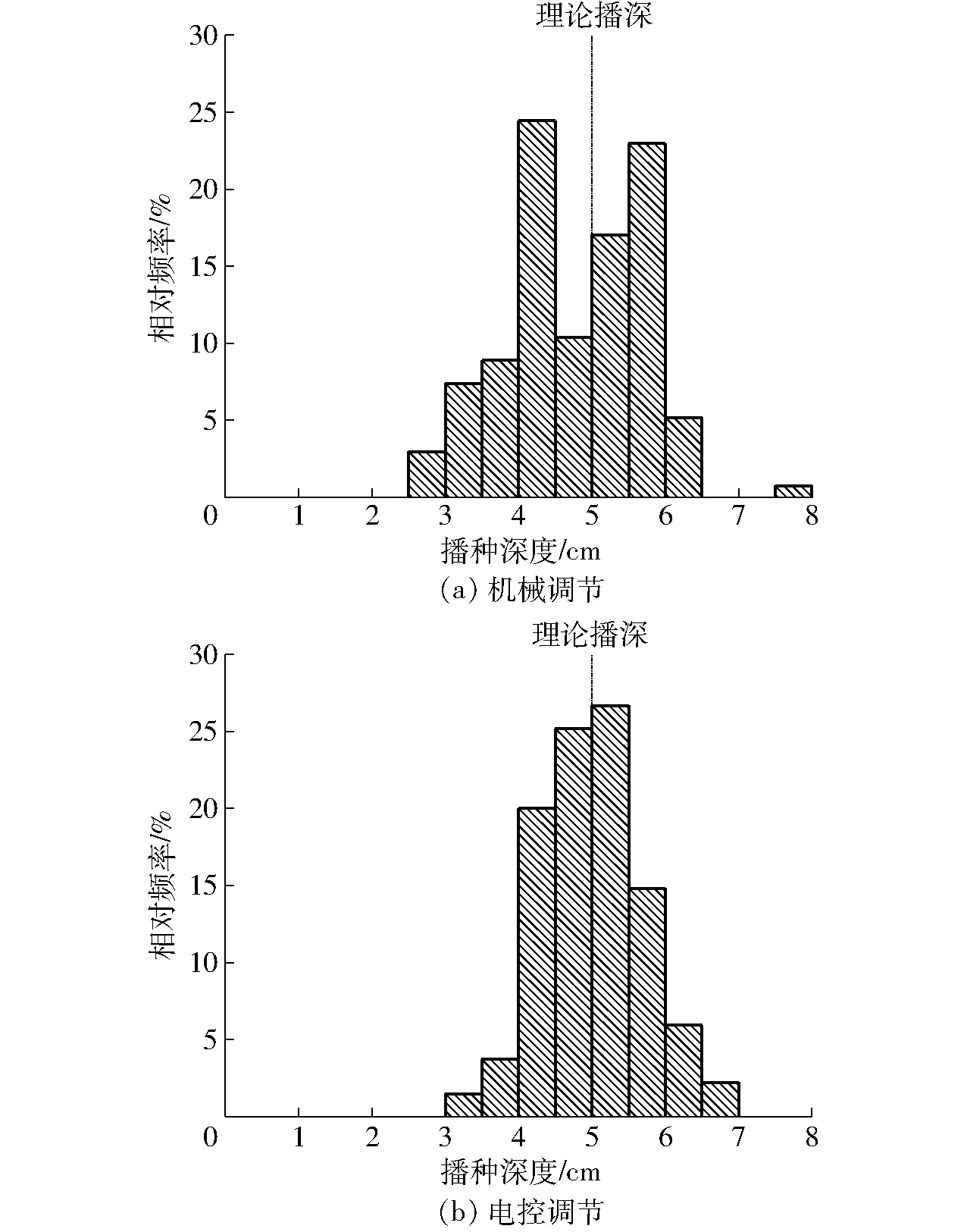
图16 下压力不同调节方式播种深度频率直方图Fig.16 Frequency histograms of sowing depth with different downforce adjustment methods
4 结论
(1)针对机械式仿形压力调节机构的不足,开展了基于力反馈的播种深度一致性控制方法研究,研制了播种单体下压力控制系统,实现了播种深度的实时精准控制。
(2)玉米播种单体下压力控制系统采用下压力感知传感器作为反馈,提高了系统的可靠性和通用性。试验结果表明,作业速度和土壤紧实度对下压力电控系统性能影响不显著,但是,下压力电控系统性能随作业速度增大和土壤紧实度增加而略有降低。
(3)在播种深度判定标准为(5.0±1.0) cm时,下压力机械调节方式和下压力电控调节方式下的播种深度合格率均值分别为77.04%和90.37%,下压力电控调节方式下的播种深度合格率均值比机械调节方式高13.33个百分点。将播种深度判定标准提高至(5.0±0.5) cm后,对应播种深度合格率分别为31.11%和56.30%,下压力控制装置的播种深度合格率比机械调节方式高25.19个百分点。可见,下压力电控系统能保持种子播种深度的稳定性,提高了种子深度一致性。
1 曹慧英. 播深对夏玉米产量形成及其生理特性的影响[D]. 泰安: 山东农业大学, 2015.
CAO Huiying. Effects of sowing depth on grain yield and physiological characteristics of summer maize[D]. Taian: Shandong Agricultural University, 2015.(in Chinese)
2 岳丽杰, 文涛, 杨勤, 等. 不同播种深度对玉米出苗的影响[J]. 玉米科学, 2012,20(5): 88-93.
YUE Lijie, WEN Tao, YANG Qin, et al. Effects of different sowing depths on seeding emergence of maize[J]. Journal of Maize Sciences, 2012,20(5):88-93.(in Chinese)
3 MOLATUDI R L, MARIGA I K, 马志强. 玉米种子大小和播深对出苗和幼苗活力的影响[J]. 中国种业, 2010(7): 59-60.
4 白石. 不同播深对玉米单粒播品种的发芽势影响分析[J]. 种子世界, 2012(11): 28-29.
5 曹慧英, 史建国, 朱昆仑, 等. 播种深度对夏玉米冠层结构及光合特性的影响[J]. 玉米科学, 2016, 24(1): 102-109.
CAO Huiying, SHI Jianguo, ZHU Kunlun, et al. Effects of sowing depth on canopy structure and photosynthetic characteristics of summer maize[J]. Journal of Maize Sciences, 2016, 24(1): 102-109.(in Chinese)
6 曹慧英, 王丁波, 史建国, 等. 播种深度对夏玉米幼苗性状和根系特性的影响[J]. 应用生态学报, 2015,26(8): 2397-2404.
CAO Huiying, WANG Dingbo, SHI Jianguo, et al. Effects of sowing depth on seedling traits and root characteristics of summer maize[J]. Chinese Journal of Applied Ecology, 2015,26(8): 2397-2404.(in Chinese)
7 李英. 免耕播种的播深和播量对春玉米生长及产量的影响[J]. 北京农业, 2010(18): 9-12.
LI Ying. An effect on spring corn growth and yield with different sowing depth and sowing norm of no-tillage fields[J]. Beijing Agriculture, 2010(18): 9-12.(in Chinese)
8 刘涛. 播深及植物生长物质对玉米胚芽鞘建成和幼苗活力的影响[D]. 大庆: 黑龙江八一农垦大学, 2015.
LIU Tao. Effect of sowing depth and plant growth substances on coleoptile built and seedling growth of maize [D]. Daqing: Heilongjiang Bayi Agricultural University, 2015.(in Chinese)
9 刘涛, 宁毅, 冯乃杰, 等. 不同播深对玉米出苗、胚芽鞘特性及幼苗活力的影响[J]. 黑龙江八一农垦大学学报, 2016, 28(2): 5-11.
LIU Tao, NING Yi, FENG Naijie, et al. Effect of different sowing depth on seedlings emergence,coleoptile properties and seedling vigor of maize[J]. Journal of Heilongjiang Bayi Agricultural University, 2016, 28(2): 5-11.(in Chinese)
10 石达金, 闫飞燕, 范继征, 等. 免耕条件下播种深度对玉米出苗性状及产量的影响[J]. 湖南农业科学, 2014(5): 19-21.
SHI Dajin, YAN Feiyan, FAN Jizheng, et al. Effects of different sowing depths on seedling characters and yield of maize under no-tillage conditions[J]. Hunan Agricultural Sciences, 2014(5): 19-21.(in Chinese)
11 杨丽, 颜丙新, 张东兴, 等. 玉米精密播种技术研究进展[J/OL]. 农业机械学报, 2016, 47(11): 38-48. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20161106&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2016.11.006.
YANG Li, YAN Bingxin, ZHANG Dongxing, et al. Research progress on precision planting technology of maize[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016,47(11): 38-48.(in Chinese)
12 YANG Li, YAN Bingxin, YU Yiming, et al. Global overview of research progress and development of precision maize planters[J]. International Journal of Agricultural & Biological Engineering, 2016, 9(1): 9-26.
13 BOSHOFF B V D. Automatic depth control for seed planter based on soil conductance sensing[D]. Raleigh: North Carolina State University, 1970.
14 JENSEN L D, NELSON C, LECLAIRE J P. Depth control device for planting implement: US 6701857[P]. 2004-03-09.
15 WEATHERLY E T , BOWERS C G JR. Automatic depth control of a seed planter based on soil drying front sensing[J]. Transactions of the ASAE, 1997, 40(2): 295-305.
16 SUOMI P, OKSANEN T. Automatic working depth control for seed drill using ISO 11783 remote control messages[J]. Computers & Electronics in Agriculture, 2015, 116: 30-35.
17 Ag Leader Technology. Hydraulic down force installation incompatibilities[EB/OL]. (2017-05-23)[2017-06-25]. https:∥www.agleader.com.
18 Ag Leader Technology. ISOBUS hydraulic down force row module detection[EB/OL]. (2016-05-04)[2017-02-25]. https:∥www.agleader.com.
19 Dawn Equipment Company. Rfx hydraulic planter row unit down-pressure[EB/OL]. (2017-05-23)[2018-01-03]. http:∥www.dawnequipment.com/Dawn_Reflex.html.
20 Deere & Company. Planter parts | depth control | John Deere US[EB/OL]. (2017-05-23)[2018-01-03]. https:∥www.deere.com/en_US/parts/parts_by_industry/ag/seeding/depth-control/depth-control.page?
21 Precision Planting LLC. Deltaforce system operation[EB/OL]. (2016-05-07)[2016-11-25]. https:∥www.precisionplanting.com.
22 Precision Planting Inc. 20/20 airforce owner’s manualsion[EB/OL]. (2011-09-01)[2016-11-25]. https:∥support.precisionplanting.com/pubs/?file=0BwSYzyFHvNvUdUJPdjlRdWlIWjA.
23 中国农业大学. 免播机开沟深度自动调节装置: ZL 200920246869.9[P]. 2009-11-20.
24 中国农业大学. 一种应用于播深自控系统的调节装置: ZL 201010101221.X[P]. 2010-07-28.
25 温丽萍, 张永, 范雄飞, 等. 基于PLC的精密播种机播种深度控制系统研究[J]. 农机化研究, 2014, 36(2): 98-101.
WEN Liping, ZHANG Yong, FAN Xiongfei, et al. The research of precision planter sowing depth control system based on PLC[J]. Journal of Agricultural Mechanization Research, 2014, 36(2): 98-101.(in Chinese)
26 温丽萍. 基于PLC的精密播种机播种深度控制系统研究[D]. 呼和浩特:内蒙古农业大学, 2014.
WEN Liping. Research of sowing depth control system for precision seeder unit based on PLC[D]. Huhhot: Inner Mongolia Agricultural University, 2014.(in Chinese)
27 赵金辉, 刘立晶, 杨学军, 等. 播种机开沟深度控制系统的设计与室内试验[J]. 农业工程学报, 2015,31(6):35-41.
ZHAO Jinhui, LIU Lijing, YANG Xuejun, et al. Design and laboratory test of control system for depth of furrow opening[J]. Transactions of the CSAE, 2015, 31(6): 35-41.(in Chinese)
28 黄东岩, 朱龙图, 贾洪雷, 等. 基于压电薄膜的免耕播种机播种深度控制系统[J/OL]. 农业机械学报, 2015,46(4): 1-8. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150401&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.04.001.
HUANG Dongyan, ZHU Longtu, JIA Honglei, et al. Automatic control system of seeding depth based on piezoelectric film for no-till planter[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015,46(4): 1-8. (in Chinese)
29 姜鑫铭. 玉米免耕播种机精确播种关键技术研究[D]. 长春: 吉林大学, 2017.
JIANG Xinming. Study on key technologies of precision seeding for maize no-tillage planter[D]. Changchun: Jilin University, 2017.(in Chinese)
30 朱龙图. 免耕播种机播种深度自动控制系统研究[D]. 长春: 吉林农业大学, 2017.
ZHU Longtu. Research on automatic control system of sowing depth for no-till planter[D]. Changchun: Jilin Agricultural University, 2017.(in Chinese)
31 HydraForce, Inc. TS90-31 proportional reducing/relieving valve[EB/OL]. (2013-06-26) [2016-11-25]. http:∥www.hydraforce.com/proport/Prop-pdf/2-884-1.pdf.
