基于MCU的球动式平衡机器人
2018-07-04西北民族大学电气工程学院郑冰欣陈天海刘宇森
西北民族大学电气工程学院 郑冰欣 陈天海 刘宇森
0 引言
机器人技术涉及到机械、电子、人工智能、传感器、通讯与网络等多个学科和领域,是多种高新技术发展成果的综合集成,代表着现在乃至未来高新技术的发展方向。同时,伴随着它在人类生活应用领域中的不断扩大,引起了各国对机器人技术的开发热潮。
目前,对机器人的研究日新月异,研究的方向越来越广阔,而人们对于平衡机器人的关注度也逐渐提高。球动式平衡机器人是一种相对稳定性很强的机器人。它的整个结构由一个球形的底座来支撑,整个机器仅有球面上的一点与地面接触,所以不能保持绝对的稳定,但这个机器人会同时通过球形底座进行不断的“微调”保持着移动和相对的平衡。
1 系统总体设计
本设计选用STM32F103系列单片机作为核心控制器控制器,辅之以MPU6050对陀螺仪及加速度计等各类传感器反馈的信号进行姿态解算并输出相应的动作指令,使得步进电机得以启动并执行相应动作。同时,本设计还可在智能终端上使用蓝牙通信方式,从而实现对球式平衡机器人进行相应的操作,如图1所示。
2 硬件系统设计
2.1 MPU-6050传感器
MPU-6050为一种6轴运动处理组件,内部集成了陀螺仪和加速度计,具有采集3轴加速度信息和3轴角速度的功能,广泛应用于机器人运动信息的采集,在本项目中主要用来监测机器人倾斜角和倾斜角的变化速度,根据这些信息控制电机的转动。
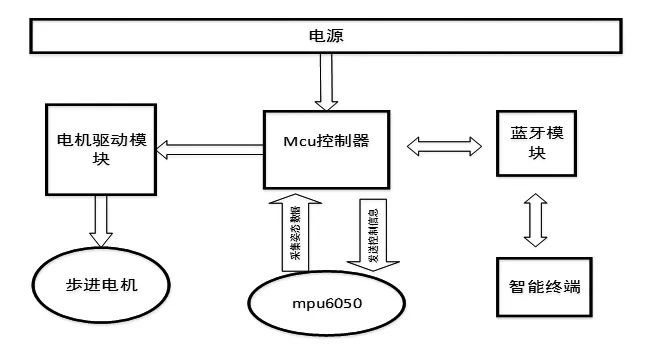
图1 系统框图
2.2 蓝牙模块及智能终端
本设计智能终端选用Android 手机并安装Minibalance APP。在机器人蓝牙模块与手机蓝牙连接并配对成功后,可通过APP对机器人进行波形的显示及参数在线调试。其中,波形显示界面可以显示三轴姿态和电量百分比,并以曲线的形式直观明了的呈现出三轴模拟数值。而在线调试界面则可对PID参数进行查看与修改。
3 软件设计
如图2所示为基于MCU球动式平衡机器人的软件设计流程图。主要是机器人的动作部分,电机执行动作的过程。其中,我们主要根据以下公式进行速度分解,从而演算出各电机速度与机器人加速度、角速度的关系。


图2 软件流程图
4 结束语
本设计主要是选用了蓝牙技术将机器人与智能终端相连接,从而控制球动式平衡机器人灵活移动的设计。其通过滤波算法对各个传感器所采集的数据进行处理后,再经过PID算法对机器人姿态进行调整,从而构成机器人平衡系统核心。内部软件拟用以MCU编程为基础,结合不同的算法来操控硬件。该机器人具有体积小、占地面积小、移动灵活方便、行动平稳高效、性能稳定、质量轻,成本较低等优点,具有一定的市场研发价值。
[1]周牡丹,康恺,蔡普郎等.两轮自平衡机器人控制系统的设计与实现[J].自动化技术与应用,2014,33(10):4-8.
[2]李磊,叶涛,谭民等.移动机器人技术研究现状与未来[J].机器人,2002,24(5):475-480.
[3]徐国华,谭民.移动机器人的发展现状及趋势[J].机器人技术与应用,2001(3):7-14.
[4]阮晓钢,任红格.两轮自平衡机器人动力学建模及其平衡控制[J].计算机应用研究,2009,26(1):99-101.
