利用红外线实现图像深度信息获取
2018-07-04亓子龙
亓子龙
(中国电子科技集团公司第二十研究所, 陕西 西安 710000)
1 图像深度信息测量方法简介
在生活中,照片成像只能显示物体的二维平面信息,现实物体具有三维立体几何特征,因此照片已经丢失了真实物体距离这一重要特征数据,无法构建起三维空间场景[2]。只要测量出照片中物体之间深度距离数据,标定在平面对应像素区域,就可以从视觉系统体现物体三维立体特征,从而建立空间模型。测量图像中图像之间深度距离信息是三维立体建模的关键,获取图像深度信息主要包括距离信息标记源的产生,对物体成像时有效的特征标记,距离信息的解析方法,特征提取匹配和像素区域距离标定等主要技术。
红外线获取图像深度的原理是当红外光穿透光栅玻璃后会随机形成衍射斑点,这些散斑具有高度的随机性,而且随着距离的不同所形成的散斑亮度、分布和大小会有变化[3]。只要用红外发射器在空间中打上这样的结构光,通过摄像头做光标定把空间中不同距离的散斑图案都记录下来,整个空间就都被做了标记,把一个物体放进这个空间,只要将物体上面的散斑图案与保存的模版进行匹配,就可以知道这个物体距离摄像头的位置。
2 图像深度信息获取仿真实验
实验采用30 W像素CMOS红外摄像头、红外激光器、微孔玻璃散射片、850 nm红外滤光片和皮尺等实验工具进行光标定。参考物分别放置在距离摄像头30 cm、60 cm、90 cm、120 cm和150 cm处拍摄红外散斑。参考物距摄像头不同距离反射的红外散斑图案会发生变化。在进行光标定时,将距离和散斑图像相对应并记录下来,这样就可以通过匹配图像特征获得深度信息。
红外散斑经过距离标定后,散斑图像特征就包含了深度信息,因此称为结构光[4]。当空间中的物体用摄像头拍摄可见光图像时,用红外散斑对物体进行标记,通过景象匹配就可以获得对应位置物体的距离信息。景象匹配先对散斑亮度进行划分,从而区分不同距离的散斑,为保证匹配精度,对图像不同亮度散斑的平均分布密度进行相关性比较[5]。
计算不同距离散斑图像亮度分布方法如式(1)。

式中image(i,j)为图像像素点亮度值,p为亮度阈值,M×N是图像大小,Num是亮度区间像素点个数,不同距离散斑的Num是不同的[6]。

不同距离散斑图像在亮度区间的分布密度是不同的,通过区分密度的大小可以提高亮度匹配精度。计算不同距离散斑图像在亮度区间的密度方法如式(2)[7]。
实验放置了两个距离不同的物体在摄像头前拍摄如下页图1,并对这两个物体进行红外散斑标记如下页图2。
3 仿真实验及结果分析
将实物的红外散斑标记图与经过距离标定的散斑图进行图像匹配,就可以得知两个物体分别距离摄像头的长度。通过编写了MATLAB GUI仿真软件(如图3所示),完成了多组实验并成功实现了图像深度信息的获取。

图1 实物可见光图
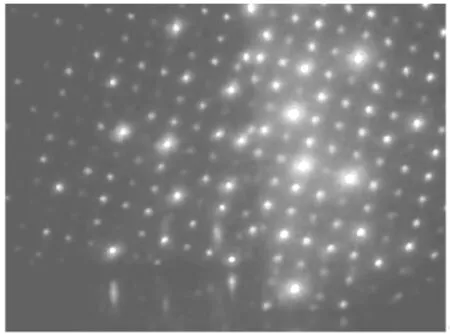
图2 红外散斑标记图

图3 图像深度信息获取仿真软件
[1]邹芳喻.车载红外图像深度估计研究[D].上海:东华大学,2013.
[2]Yamagishi H,Suzuki K,Hamamoto T.High-accurate depth estimation with the free-viewpoint image synthesis system[J].Ite Technical Report,2011(3):53-56.
[3]Zheng W G,Piao Z L,Tan D M,et al.Infrared Thermal Imaging of Power Grid Fault Information Acquisition System Based on GIS[J].Advanced Materials Research,2013,791-793:1 892-1 896.
[4]候俊杰.夜间模式下场景深度信息获取及彩色三维重建研究[D].上海:东华大学,2016.
[5]孙韶媛.采用KPCA和BP神经网络的单目车载红外图像深度估计[J].红外与激光工程,2013,42(9):2 348-2 352.
[6]戈曼,孙韶媛,席林,等.基于单目深度估计的红外图像彩色化方法[J].微计算机信息,2012(10):413-414.
[7]王一娇.结构光深度图像获取算法研究[D].北京:清华大学,2014.
