高速铁路动检车检测数据里程误差评估与修正
2018-07-04王沂峰
汪 鑫,王 源,王 平,王沂峰
(西南交通大学高速铁路线路工程教育部重点实验室,成都 610031)
轨道不平顺是车辆振动的重要激扰源,直接影响列车运行安全性、平稳性和舒适性[1]。利用动检车测量轨道几何不平顺是目前通用的轨道平顺性检测手段,获取的轨道状态数据不仅可用于指导现场养护维修,也可用于轨道状态演变规律研究,为实现铁路的预知性维护管理提供数据支撑[2]。在当前的动检车里程标定系统中,基于GPS自动校正的里程计定位方式,因简单、经济、高效被我国广泛采用[3]。但该系统在运行过程中,由于受轮径尺寸误差、轮轨间的相对滑动、轮轴光栅编码器故障、GPS局限性等因素影响[4-6],动检数据不仅存在里程误差且不断累计,在重新标定当前里程后又可能存在里程标识的重复或者缺失等问题。里程误差不仅影响轨道质量状态的评估精度、增加工人养护维修的劳动强度,同时为深度挖掘轨道状态数据带来困难,阻碍轨道预知性维护管理的发展。因此减小动检车检测数据里程误差,对实现准确评估轨道几何状态、提高天窗利用率与深入研究轨道几何形位演变规律具有重要意义[7]。
动检数据里程误差可分为绝对里程误差与相对里程误差[8],绝对里程误差是指检测里程与线路实际里程偏差,相对里程误差是不同次测量数据间的里程误差。目前对于相对里程误差的修正,大都是人为选定某个时间测量数据作为校正基准数据,再基于相关系数法[4]、最小二乘法[9]、灰色关联度[10]、动态时间规划[11-12]等算法逐区段甚至逐点计算其与待修正数据的里程误差并进行修正。尽管上述方法较好地控制了动检数据的相对里程误差,但绝对里程误差未得到处理。对于绝对里程误差处理,文献[13]基于最小二乘法对整段曲线进行匹配,得到里程误差并修正;文献[14]中提出将曲线直缓点和缓直点作为里程校正点,可更进一步地对误差进行控制;文献[7,15]提出根据关键设备信息来校准里程误差的思想,并结合线路实际的设备里程信息对不同时间的动检数据进行绝对里程误差修正。上述研究存在以下两点不足。
(1)缺少对里程误差的定量评估模型:既有方法主要是通过观察波形的重复效果定性得出,如文献[7,13-15];
(2)里程误差修正的单元区段过长。如文献[13]将整个曲线作为修正单元,缺陷主要有:①里程误差的非均匀分布特性导致该区段的里程误差估计存在较大偏差;②过长的单元区段导致无法控制区段内部的里程误差。统计我国多条高速铁路共1 000多km线路信息,对于曲线长度超过4 km时,上述不足尤为明显。
本文基于局部波形匹配与统计方法建立里程误差的定量评估模型,实现对动检数据绝对里程误差与相对里程误差的定量评估,同时建立了基于两次插值方法的里程误差修正模型。此外,通过导入动检车检测超高数据与线路设计曲线信息,本文方法可自动识别出曲线主点(直缓点、缓圆点、圆缓点和缓直点)作为里程校正点,进而在里程误差评估模型中,采用的较短的单元区段长度以实现更加精确的里程误差估计,并达到比既有方法精度更高的修正效果,从而为减少现场养护维修工作量、实现轨道的演变状态分析与进一步提升高速铁路运行品质提供保障。
1 里程误差评估模型
由于动检车里程定位精度受多种因素影响并存在误差累计,里程误差几乎沿线处处存在[16]。对绝对里程偏差的度量需依据合适的绝对里程参照,进而实现对绝对里程误差的评估。
依据线路设计资料,能明确起讫里程的线路设备包括曲线、股道、道岔、坡道、桥梁等[17]。考虑到这些线路设备与实测数据各通道特征之间的关系,金属标识与桥梁、道岔等结构存在一定的关联,但因其辨识可靠性较差而不予考虑,而实测曲率、超高与线路平面曲线密切相关,同时参考现有文献[7,13-14]中可靠的绝对里程标识数据为线路平面曲线,本文选取动检数据中超高数据对线路绝对里程误差进行评估。
为对里程偏差进行精细化修正,本文基于波形匹配方法建立里程误差评估模型。如图1所示:对于实测超高数据X={xi|i=1,2,…,N}与设计超高数据有Y={yi|i=1,2,…,N},当局部波形存在里程偏差时,取局部尺度s,X与Y在位置k处的局部超高数据记为Xs,k与Ys,k。定义在局部尺度s下,k位置的X相对于Y的里程偏差δs,k及相似度ρs,k为
(1)
ρs,k(X,Y)=P(Xs,k+δs,k,Ys,k)
(2)
其中,P(x,y)为皮尔逊相关系数函数
(3)
在尺度参数s的情况下,实测超高X相对于设计超高Y的里程偏差Ds(X,Y)为
(4)

在实际工程应用中,若位置k处因传感器异常等原因出现连续的异常值扰动,则Xs,k与Ys,k可能出现弱相关情况,即ρs,k(X,Y)≪1,此时距离偏差δs,k(X,Y)的估计可能出现错误,因而考虑在相似度阈值ρ0的情况下,定义条件判断符号bo(ρ,ρ0)为
(5)
于是,在考虑相似度阈值ρ0时,里程误差表达式Ds(X,Y)重定义为Ds,ρ0(X,Y)
(6)


图1 局部位置处里程偏差
2 里程误差修正模型

Dnew=interp(dori,dnew,dv,method1)
(7)
Xnew=interp(Dnew,X,dv,method2)
(8)
式中,interp(x,y,xi,method)为插值函数;y为函数值矢量;x为自变量取值范围;xi为插值点的自变量矢量;method为插值方法;Dnew为通过分段插值方法得到原始动检数据测量点的移动位置;Xnew为在新里程下,采样点等距离分布的动检数据;dv为等距离采样的序列(一般间隔0.25 m)。
为尽可能避免因高次插值造成误差放大及多次插值造成原始数据幅值减小现象,此处分别采用线性插值和三次多项式插值算法。同时,该误差修正模型存在如下约束条件。
St1.误差限约束:某线路的测量里程与实际里程偏差一般存在限值,误差限Δ选取一般根据具体线路决定,由此可得
|dori-dnew|≤Δ
(9)
St2.单调性约束:尽管测量点的里程数据有存在重复现象,但后测点的实际里程一定比先测点里程值大,即修正后数据在空间上要满足单调递增的性质
dnew(i-1) (10) St3.连续性约束:若测量过程中存在因传感器锁死出现连续零值等现象,但数据上应仍具备连续采样特性,即不存在数据采样点的缺失,因此修正后动检数据里程应满足 dnew(i)-dnew(i-1)<ω (11) 其中,ω为动检车理论采样距离的2倍。 图2 动检数据里程标识变换 以某双向客运专线为例进行分析,该线于2014年底开通,50%左右的路段为桥梁、隧道,选取2015年该线上行段约100 km的动检数据,其中该段含有平面曲线38段,最小曲线长189 m,最大曲线长4.42 km。 通常来说局部尺度s的确定带有半经验性,一般取60~100 m,计算尺度太小则计算量过大且容易出现匹配错误情况,而计算尺度过大则不能很好地控制匹配精度。为兼顾计算效率与模型精度,结合线路实际测量情况,取误差限Δ=100 m,局部尺度参数见表1。 表1 计算参数 确定绝对里程校正点的方法如下:基于公式(6),分别将某次实测动检数据的超高数据与设计超高信息进行匹配,每次计算移动步长为1个测量点,由此可得到各个匹配区段中最大相关系数ρs,k以及其对应的距离偏差δs,k沿里程分布如图3所示:直线段和圆曲线段的超高值为常数,因此不存在皮尔逊相关系数;缓和曲线段超高变化率为定值,尽管局部波形匹配时在不同δs,k下均具有强相关性(>0.9),而该段实测超高数据与线路设计超高不存在明确的距离偏差关系。因此,若匹配区段完全在直线段、圆曲线段或缓和曲线段,则局部波形匹配结果不具有参考意义。 曲线主点处的最大相关系数ρs,k存在由强到弱或者由弱到强变化,即曲线主点处的超高信息具有很强的特征性;如图3(a)所示,若超高波形包含曲线主点,则只有当实测曲线主点与线路设备曲线主点里程偏差为零或者接近于零时相关系数出现最大值。 图3 实测超高与线路设计超高匹配 文献[11]将整段曲线作为一个里程校正点,文献[14]仅将曲线直缓点与缓直点作为里程校正点,可理解为因包含曲线主点故具备可操作性。而通过上述分析可知:每段曲线的4个曲线主点均可单独作为绝对里程校正点,由于该方法提高校正点的误差辨别精度,同时增加里程校正点数量、缩小校正点间距离,进而可较好地处理长曲线内部里程误差,实现绝对里程误差的精细化修正。 在给定区段尺度s后,基于绝对里程误差评估模型计算线路校正点的局部波形距离偏差。如图4所示:按照此距离偏差对实测曲线主点处里程平移后,则主点处波形能较好吻合线路设计超高信息。并由此可得到各曲线主点处里程误差均值为-4.1 m,取其3倍标准差值19.7 m作为里程误差代表值,则可得到该线实测动检数据绝对里程误差分布区间为[-23.8 15.6] m。 图4 曲线主点匹配情况 采用两次插值算法对该线里程误差进行修正,并得到该线动检数据里程误差修正效果如图5所示:原始动检数据存在明显的绝对里程误差与相对里程误差,经本文模型修正后,绝对里程误差明显减小且相对里程误差也得一定控制。为定量评估修正精度,基于绝对里程误差评估模型计算在更小局部尺度下经里程修正后的动检数据绝对里程误差,可得曲线主点残余绝对里程误差均值0.012 m,误差代表值为0.7 m,则残余绝地里程误差分布区间为[-0.7 0.7] m,同时也说明本文模型的里程修正精度更高[15]。 图5 里程误差修正效果对比 相对里程误差控制效果分析如下:基于公式(6)方式,分别将X与Y替换成不同时间的原始动检车数据,并选取轨距指标计算各次测量数据在一定尺度下的相对距离偏差[9,18]。每次计算移动一个尺度长度,并参阅有关文献[12]将相关系数阈值取ρ0=0.82,最终可得到相对里程误差均值为-0.09 m,相对里程误差代表值为15.8 m,则原始动检车数据相对里程误差分布区间为[-15.9 15.7] m。同理,可得经误差修正后动检数据残余相对里程误差均值为0.002 m,残余相对里程误差代表值为4.2 m,则残余相对里程误差分布区间为[-4.2 4.2] m。 综上,该线路在99.7%置信度下(3倍标准差),该线路原始动检数据绝对里程误差在[-23.8 15.6] m,相对里程误差[-15.9 15.7] m;经过本文模型对误差修正后,控制点附近处绝对里程偏差可控制在0.7 m内,全线相对里程误差可控制在4.2 m。因此本文模型可较好地分析线路里程误差,并具有较高的里程误差修正精度。 本文针对动检车检测数据中存在里程误差问题进行研究,从减小绝对里程误差角度对里程误差进行处理并取得了较好的效果,为提高天窗利用率与研究轨道状态演变规律提供保障。主要结论可概括如下。 (1)基于局部波形匹配方法建立动检车数据里程误差定量评估模型,分析发现动检车检测数据绝对里程误差近似服从均值不为零的正态分布,相对里程误差近似服从均值为零的正态分布。 (2)通过对平面曲线信息分析可知,平面曲线中各主点均可作为里程校正点,本文方法可自动识别出曲线主点位置,进而增加里程校正点数量、缩小校正点间距离,并更精确地处理线路尤其是长大曲线内部的里程误差。 (3)本文的误差修正模型从减小绝对里程误差的角度对动检数据里程误差进行处理,并可有效减小动检数据相对里程误差。一般地,原始动检数据中里程误差经本文模型处理后,里程校正点附近处绝对里程偏差可控制在0.7 m内,全线相对里程误差可控制在4.2 m。 [1] 罗林.高速铁路轨道必须具有高平顺性[J].中国铁路,2000(10):8-11. [2] Esveld C. Modern Railway Track[M]. The Netherlands: Delft University of Technology Publishing Service, 2001:349-406. [3] Hanreich W, Mittermayr P, Presle G. Track geometry measurement database and calculation of equivalent conicities of the OBB network[C]∥American Railway Engineering and Maintenance of Way Association 2002 Conference, Washington DC. 2002:179-187. [4] 曲建军.基于提速线路TQI的轨道不平顺预测与辅助决策技术的研究[D].北京:北京交通大学,2010. [5] Allotta B, Colla V, Malvezzi M. Train Position And Speed Estimation Using Wheel Velocity Measurements[J]. Proceedings of the Institution of Mechanical Engineers Part F Journal of Rail & Rapid Transit, 2002,216(3):207-225. [6] 乔超,唐慧佳.列车里程计定位方法的研究[J].兰州交通大学学报,2003,22(3):116-119. [7] 徐鹏.铁路轨检车检测数据里程偏差修正模型及轨道不平顺状态预测模型研究[D].北京:北京交通大学,2012. [8] Selig E T, Cardillo G M, Stephens E, et al. Analyzing and Forecasting Railway Data using Linear Data Analysis[J]. Computers in Railways XI, 2008(9):25-34. [9] Li H, Xu Y. A Method to Correct the Mileage Error in Railway Track Geometry Data and Its Usage[C]∥International Conference on Traffic and Transportation Studies, 2010:1130-1135. [10] 李再帏,雷晓燕,高亮.轨道不平顺检测数据的预处理方法分析[J].铁道科学与工程学报,2014(3):43-47. [11] Myers C S, Rabiner L R. A Comparative Study of Several Dynamic Time-Warping Algorithms for Connected-Word Recognition[J]. Bell Labs Technical Journal, 2013,60(7):1389-1409. [12] Xu P, Liu R, Sun Q, et al. Dynamic-Time-Warping-Based Measurement Data Alignment Model for Condition-Based Railroad Track Maintenance[J]. IEEE Transactions on Intelligent Tran-sportation Systems, 2015,16(2):799-812. [13] 隋国栋,李海锋,许玉德.轨道几何状态检测数据里程校正算法研究[J].交通信息与安全,2009,27(6):18-21. [14] 李文宝.钢轨磨耗检测与列车定位技术研究[D].成都:西南交通大学,2013. [15] Xu P, Sun Q X, Liu R K, et al. Key Equipment Identification model for correcting milepost errors of track geometry data from track inspection cars[J]. Transportation Research Part C Emerging Technologies, 2013,35(9):85-103. [16] Brien D K. Optimal estimation and rail tracking analysis[D]. Lowell: University of Massachusetts Lowell, 2005. [17] 易思蓉.铁道工程[M].北京:中国铁道出版社,2009:69-74. [18] 许心越.基于轨检车检测数据的轨道状态预测模型研究[D].北京:北京交通大学,2007.
3 实例分析
3.1 计算参数
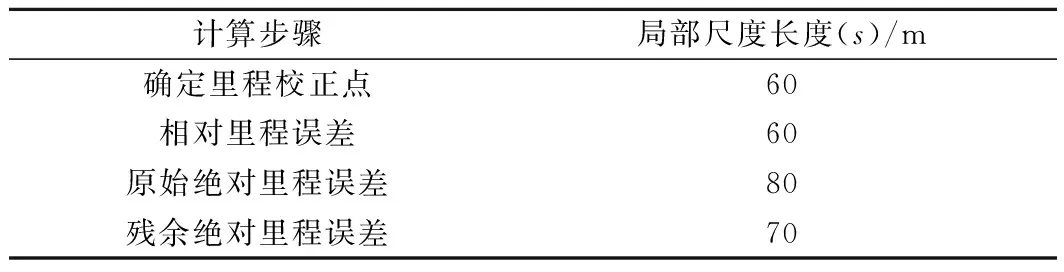
3.2 修正效果分析

4 结论