机电作动系统故障影响分析与故障检测方法
2018-07-03杨建忠杨珍书孙晓哲
杨建忠,杨珍书,孙晓哲
(中国民航大学天津市民用航空器适航与维修重点实验室,天津 300300)
0 引 言
随着多电飞机的发展与电传飞控技术的成熟,电力作动系统以其高可靠性、无污染、便于维护等优点,已作为多电飞机作动系统的关键技术,成为新型作动系统的发展方向[1]。其中,机电作动系统(以下简称EMA)作为功率电传的典型特征之一,逐渐取代液压作动系统,已在新型民用客机的飞控作动系统中得到应用[2]。例如波音787和空客380已将EMA应用于水平安定面配平作动和扰流板作动。然而,目前在役民机仍以液压作动系统为主要作动形式,因此,EMA尚未有足够长的运行时间与足够大的数据积累以得到可靠的故障统计数据。
中国民航规章CCAR 25.671(c)条款规定,必须用分析、试验或两者兼用来表明,在正常飞行包线内发生飞行操纵系统故障后,不需要特殊的驾驶技巧或体力,飞机仍能继续安全飞行与着陆。EMA作为飞行操纵系统的安全-关键部件,对其进行故障模式及影响的研究十分必要[3-5]。
当前EMA故障影响及故障特征来源于工业技术报告、军方报告的经验数据,关于EMA的故障机理和故障影响分析仍鲜有文献开展系统研究[6-8]。
本文基于EMA故障机理分析,选取典型的故障模式,通过故障仿真分析该种故障模式对EMA的故障影响。提出基于快速傅里叶变换的故障检测方法,提取故障特征,为EMA故障检测提供理论支持。
1 典型故障模式选取
1.1 EMA故障模式梳理
EMA集电磁机构、传感器、电力电子线路多种部件为一体,其可能出现的故障模式复杂且各不相同。基于EMA的架构和工作原理,对其故障模式进行分析与整理,按照功能实现的分类原则将EMA的故障模式分为电子控制装置故障、驱动器故障、无刷直流电动机故障、机械传动故障和传感器故障5个模块,且故障特征的选取准则如下:
(1)故障特征之间差别大,但是特征样本之间的差别小;
(2)故障特征对外界环境变量如噪声、系统误差等相对不敏感;
(3)故障特征与EMA其他故障模式的故障特征不关联。
根据CCAR 25.671(c)的要求,基于EMA故障机理进行分析,并考虑若不及时纠正与诊断就会发展成为失效情况[9],对EMA的故障模式整理与归纳如表1所示。

表1 EMA传统故障模式
1.2 非指令信号
表1中的故障模式并未考虑到电子飞行控制系统和EMA的新颖独特设计特征,而这也是适航审查的难点与关注重点,应对其新颖的故障模式及故障影响进行研究。
经验表明,能够对电子线路中传输信号产生干扰并修改指令信号的主要干扰有[10]:有害的瞬变、异步微处理器对信号的处理、传输延迟的有害影响、传感器噪声、不可靠的传感器信号、失真效应、电磁效应等。基于对非指令信号故障机理分析,EMA非指令信号的产生位置及形式如表2所示。

表2 EMA非指令信号的产生位置与形式
以上综合考虑CCAR 25.671和专用条件指令信号完整性的要求,对EMA的故障模式进行梳理。
综上可得EMA典型故障模式如表3所示。基于选取的典型故障模式,建立故障模型并进行故障仿真。
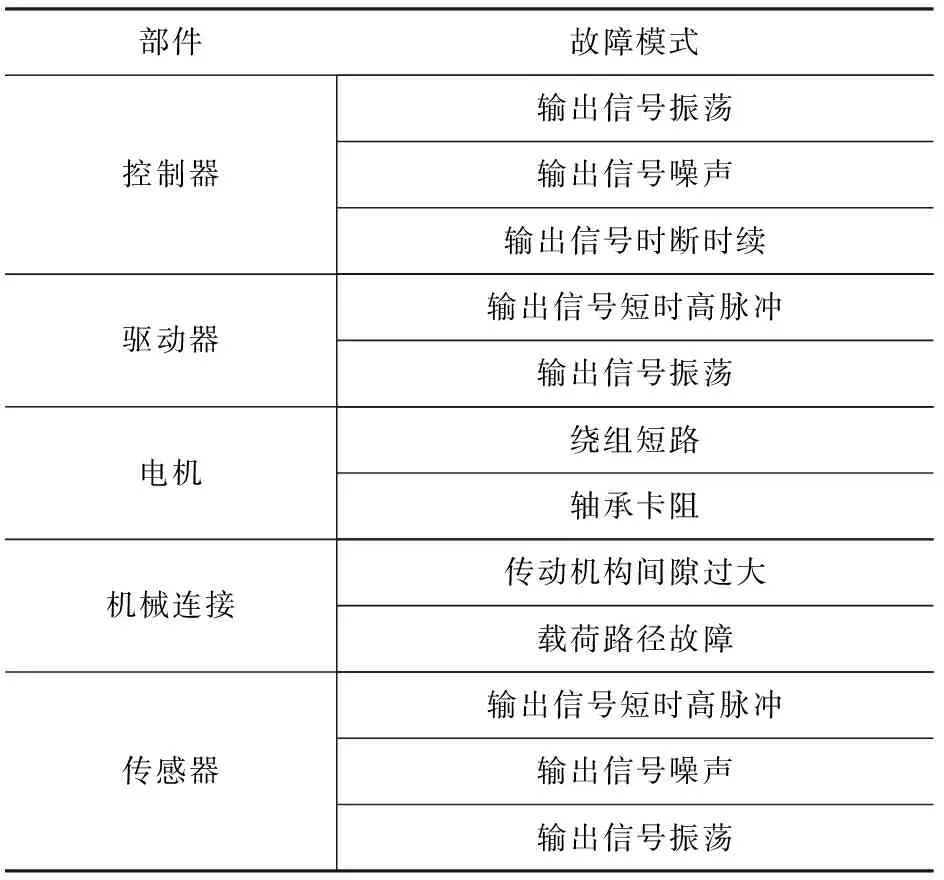
表3 EMA典型故障模式
2 故障仿真
图1为EMA故障模型仿真框图。它主要由控制器、逆变模块、驱动模块、电机本体、机械传动模块等组成,感应电动势计算模块采用分段线性化的方法,电流闭环采用PWM控制。
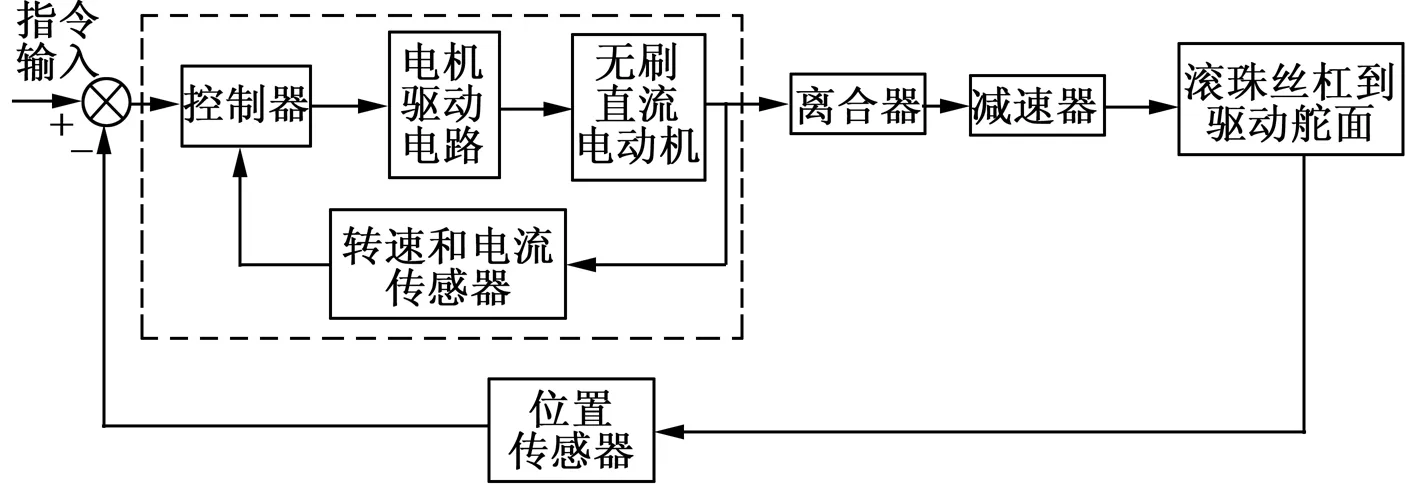
图1 EMA故障模型仿真框图
对表3中的故障模式进行故障建模与仿真。采用S函数表述电机绕组短路、轴承卡阻等故障发生时系统参数的变化;考虑非指令信号为“液态”非指令信号[11],即为正常信号与干扰信号的叠加,其故障注入原理图如图2所示。

图2非指令信号故障注入原理图
2.1 绕组匝间短路故障
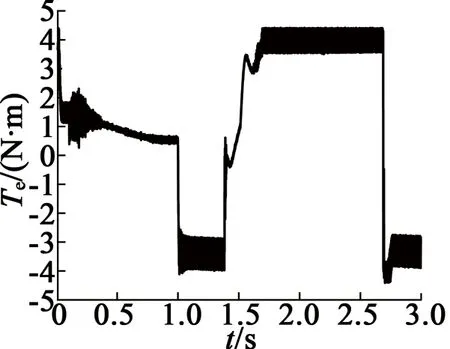
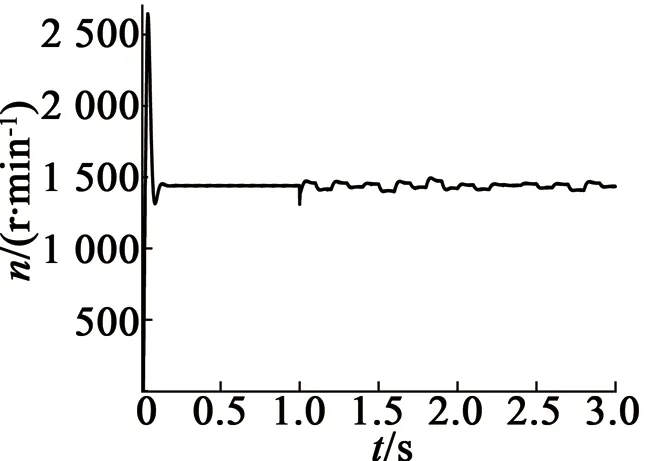
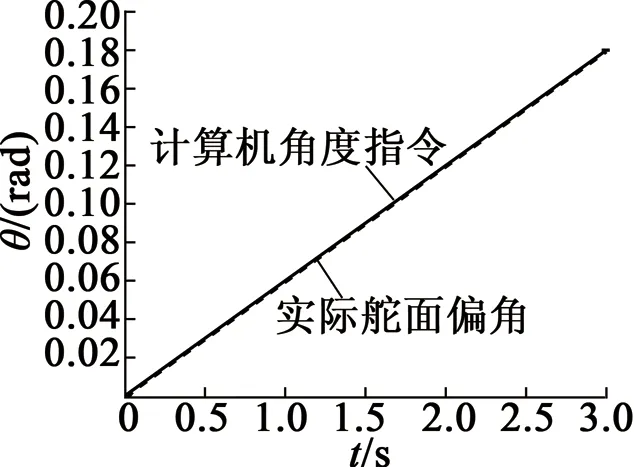
已知应用于民用客机水平安定面的EMA驱动舵面作动时,最高配平速度为6.98×10-3rad/s,舵面最大轴向载荷为4 000 N,所需驱动转矩峰值为3.2 N·m,因此EMA输入舵偏指令为斜率k1=0.06斜坡信号,负载转矩2.2 N·m。故障百分比Sa设为0.8,系统运行1 s时A相绕组发生匝间短路故障,故障时刻系统响应如图3所示。
由图3可知,电机转速约0.12 s达到稳定,响应迅速;作动系统正常运行时,输出舵偏平稳且能精确跟踪指令信号,三相电流相差120°相位,输出电磁转矩在2.2 N·m附近波动。

(a) 电机相电流
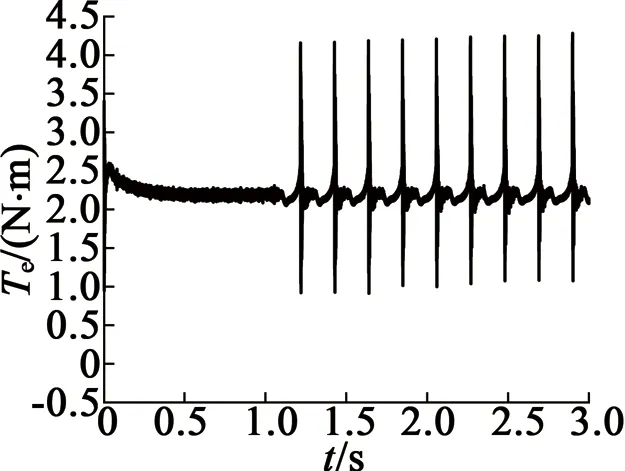
(b) 输出转矩
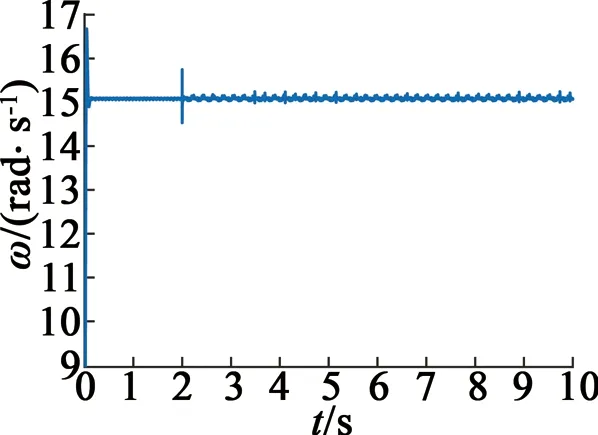
(c) 电机角转速
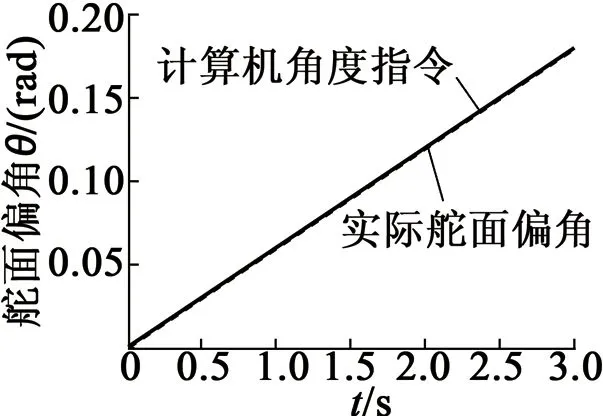
(d) 舵偏输出
A相绕组发生匝间短路故障后,三相电流相位仍能正常切换,但短路相电流幅值增大,电流波形受电感影响发生畸变,输出转矩受短路环流影响发生剧烈脉动。由于闭环调节作用,输出舵偏基本不受影响。若在此故障模式下持续长时间工作,三相不均衡电流可能导致系统内部温升,影响电机作动性能,带来不必要的轴承磨损甚至烧毁电路,为EMA带来更严峻的故障影响。相比舵偏输出值,驱动电机三相电流响应迅速,故障特征明显,更应将其作为匝间短路的故障特征。
2.2 电机轴承卡阻故障

(a) 输出电磁转矩

(b) 电机转速

(c) 舵偏输出
2.3 载荷路径间隙过大
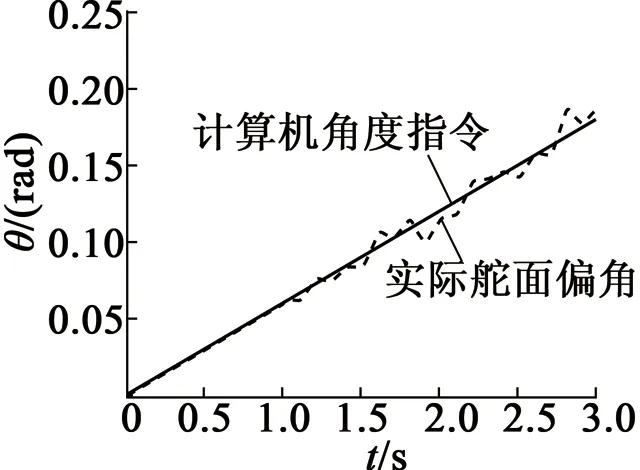
由于载荷路径间隙过大仅在系统反向作动时产生故障影响,因此EMA输入舵偏指令为幅值0.6 rad、周期2 s的正弦信号,负载转矩2.2 N·m,系统运行1 s时载荷传递路径出现间隙过大故障,故障时刻系统响应如图5所示。
(a) 输出电磁转矩
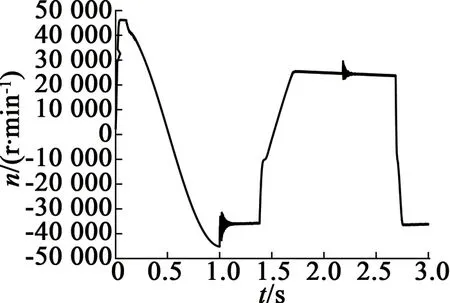
(b) 电机转速
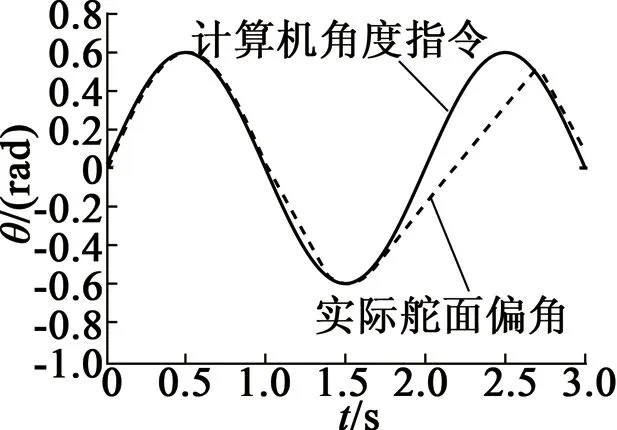
(c) 舵偏输出
由图5可知,在系统反向动态作动过程中,由于过大的间隙干扰,输出舵偏不能精确跟踪指令信号,控制器试图通过调节驱动电机转速不断减小误差,由此带来输出转矩振荡。在反向作动的动态调节过程中,间隙过大且干扰不断累积,导致输出舵偏产生大的误差,直到反向作动完成,跟踪性能存在0.7 s延迟。
2.4 传感器输出信号噪声
EMA输入舵偏指令为斜率k1=0.06斜坡信号,负载转矩2.2 N·m,系统运行1 s时传感器叠加高斯噪声干扰,故障时刻系统响应如图6所示。
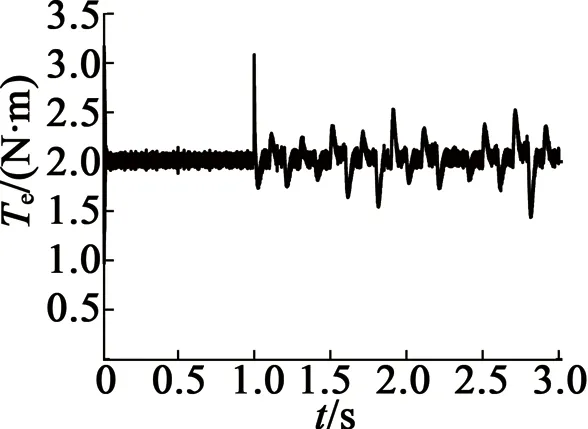
(a) 输出电磁转矩
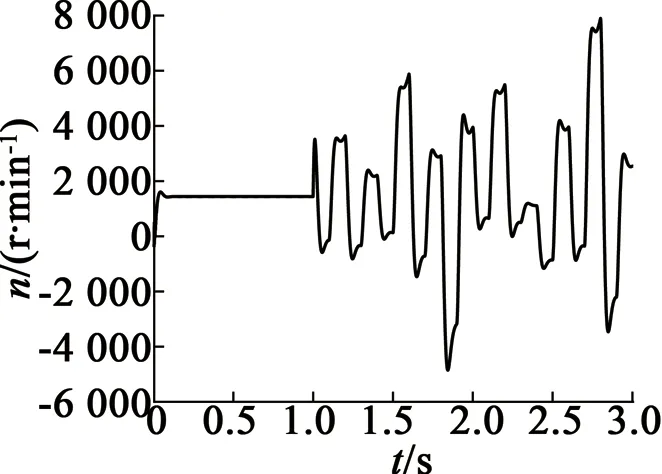
(b) 电机转速
(c) 舵偏输出
由图6可知,位置传感器输出信号叠加噪声干扰后,由于控制器闭环作用,系统误差信号被放大且随噪声信号波动。驱动电机输出转速、系统输出转矩与输出舵偏受到错误的误差信号调节产生噪声波动。输出舵偏波动易造成舵面振荡失效,影响舵面配平并对飞机结构造成衍生影响。
2.5 控制器输出信号噪声
EMA输入舵偏指令为斜率k1=0.06斜坡信号,负载转矩2.2 N·m,系统运行1 s时控制器叠加高斯噪声干扰,故障时刻系统响应如图7所示。

(a) 输出电磁转矩
(b) 电机转速
(c) 舵偏输出
由图7可知,控制器输出信号叠加噪声干扰后,对驱动电机电流、转速、输出转矩的调节部分产生噪声干扰。由于控制器闭环作用,调节输出舵偏跟踪指令信号,减小误差,输出舵偏基本不受影响。相比舵偏输出值,驱动电机输出转矩故障特征明显,更应将其作为控制器噪声信号干扰的故障特征。
通过以上故障仿真及影响分析可知,EMA各个部件发生典型故障后,虽会造成输出电磁转矩振荡、电机转速波动,但系统仍能够带故障运行,且某些故障(驱动电机绕组短路、控制器产生噪声非指令信号)基本不影响舵偏输出。虽然故障时刻舵偏输出受故障影响较小,但此时系统作动性能变差,若不能根据有效的故障特征进行准确及时判断,故障的衍生影响将进一步恶化系统性能,导致不可接受的故障响应。
3 故障检测方法
通过分析故障模式的原始故障信号不能够提取故障特征,因此,需要通过必要的时域分析、频域分析或者时频域分析提取故障特征。时域分析包括时域统计分析、高阶统计量和短脉冲等方法,该种方法仅能够对系统的故障特征及表现进行基本的描述与分析。时频域分析方法包括小波变换、短时傅里叶变换等,该方法从滤波器组结构中寻找故障信号的主频带,能够从干扰噪声信号中精确提取故障特征。频域故障特征分析方法包括高阶频谱分析、包络分析、快速傅里叶变换等,该种分析方法能够有效地从故障信息中提取重要故障特征[12]。其中,快速傅里叶变换(FFT)分析能够提取时域分析中隐藏的重要信息[13],且理论成熟适用范围广,基于频域分析,总谐波失真值(THD)能够体现系统的故障特征[14],因此FFT方法成为有效的故障特征提取方法。基于故障仿真模型,利用FFT技术方法,通过分析EMA输出电磁转矩和驱动电机定子电流的谐波,提取故障特征,为故障定位与检测提供理论基础。
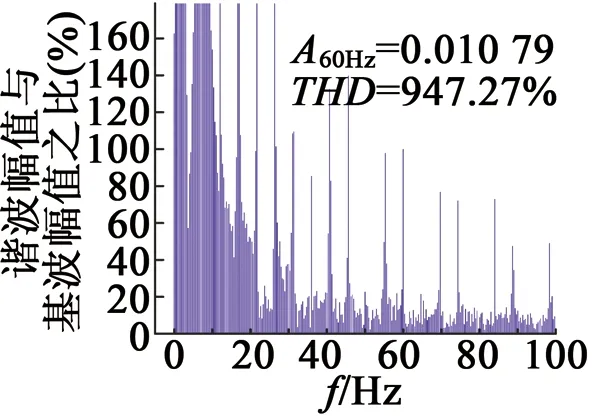
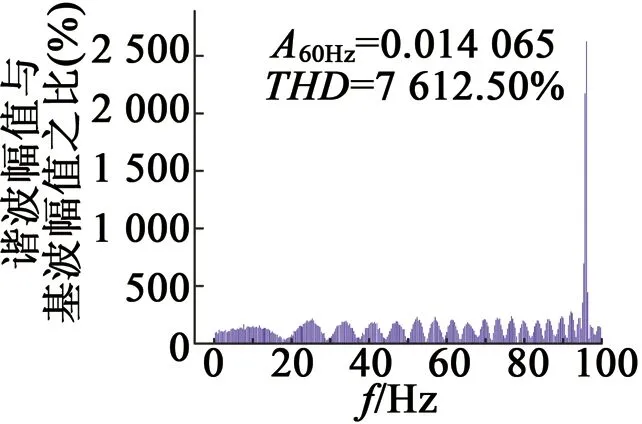
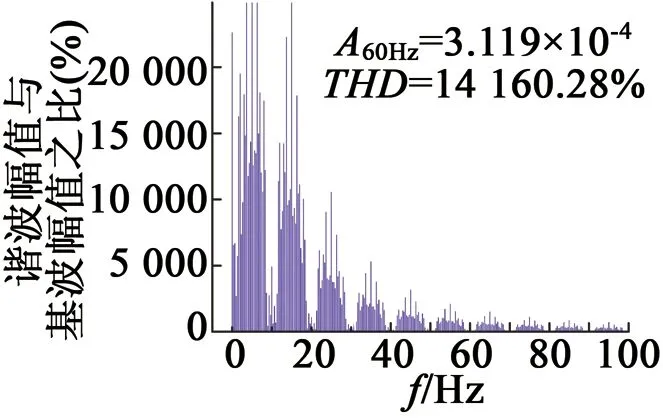
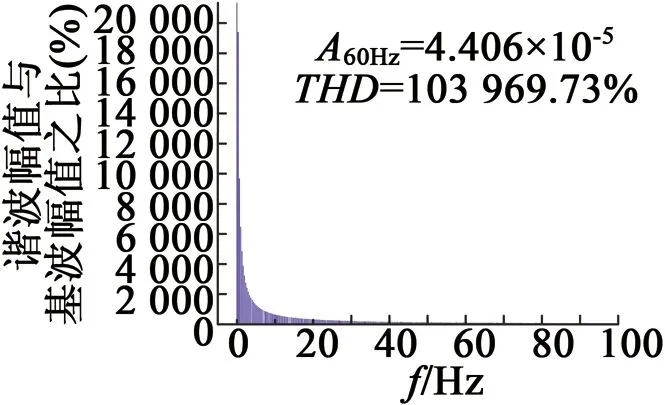
当EMA发生匝间绕组短路故障时,驱动电机A相电流、输出电磁转矩的频谱特性规律基本不变,但其谐波幅度随短路故障程度增加而减小,如图8~图10所示。

(a) A相相电流FFT分析

(b) 输出转矩FFT分析
(a) A相相电流FFT分析
(b) 输出转矩FFT分析

(a) A相相电流FFT分析
(b) 输出转矩FFT分析
因此,发生同一故障时,A相电流、电磁转矩频谱特性规律基本不变,但THD值随故障严重程度的增加而增大,如表4所示。

表4 A相电流与电磁转矩的THD值
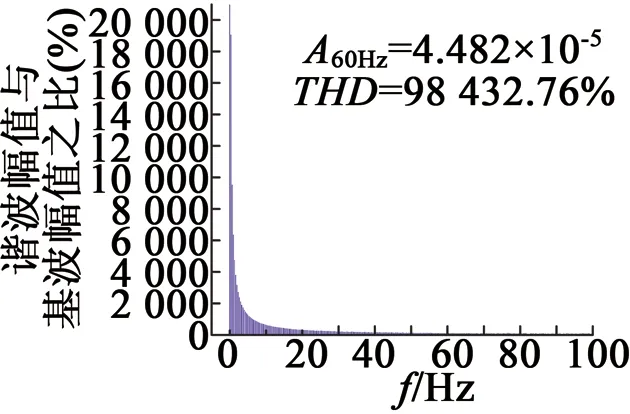
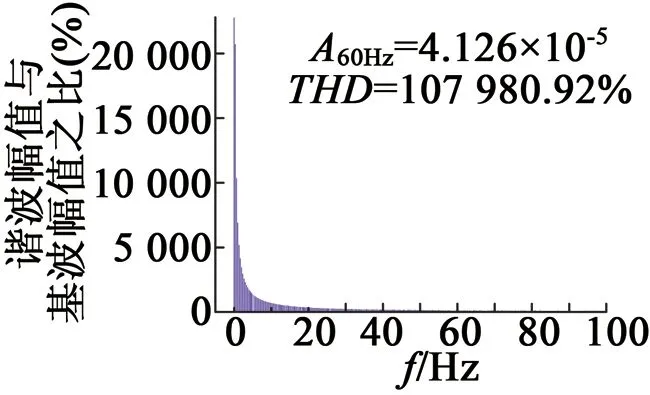
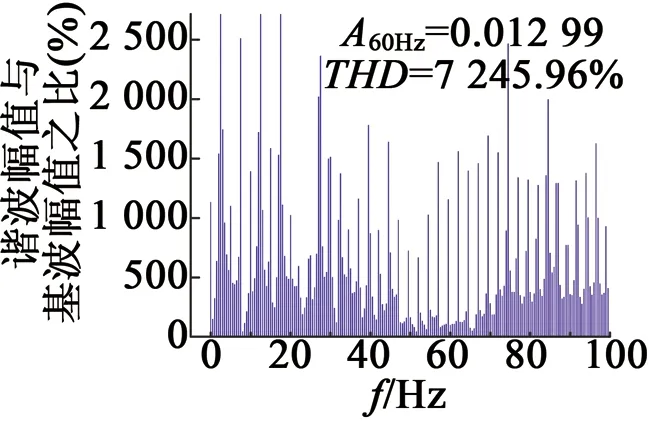
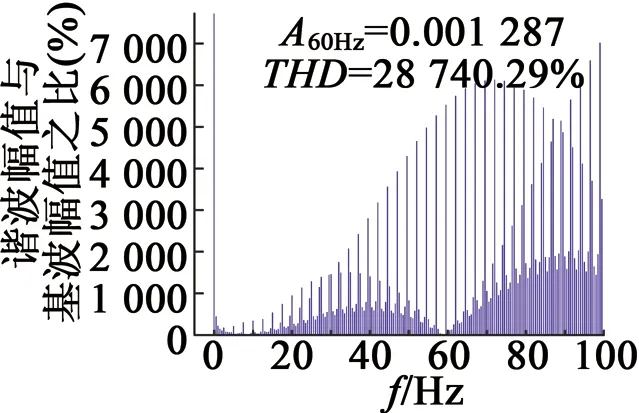
由于驱动电机的故障信号存在调制现象,系统轴承输出信号中存在噪声干扰,通过FFT分析直接观察其故障频率的分量可能无法正确检测到相应故障。Hilbert-Huang Transform (HHT)和Spectral Kurtosis (SK)仅在故障信号标定的频带进行故障特征分析,虽能够降低由于噪声带来的干扰,但是由于滤波器的限制,这些方法所确定故障信号的主频带可能不与故障频带匹配,不能及时发现故障。因此,EMA多种故障模式及噪声干扰对其故障的检测有一定难度。文献[15]采用模拟退火和谱峰度的综合方法对最佳频段进行定位,这种方法通过模拟退火使频谱峰度最大化来实现频带优化,进而解决局部单一故障因调制与干扰不易被检测的问题。FFT分析方法成熟,为能够减小信号调制及噪声对FFT分析结论的干扰,以此准确提取故障特征,明确多种故障模式及其影响之间的对应关系,本文以电机轴承卡阻(图11)、载荷路径间隙过大(图12)、传感器信号干扰故障(图13)、控制器信号干扰故障(图14)为例,分别对EMA典型故障模式进行FFT分析,对比不同故障模式下故障特征的差异,总结规律性结论如表5所示,能够对多种故障模式进行准确的故障特征提取。
(a) A相相电流FFT分析
(b) 输出转矩FFT分析
(a) A相相电流FFT分析

(b) 输出转矩FFT分析

(a) A相相电流FFT分析
(b) 输出转矩FFT分析

(a) A相相电流FFT分析
(b) 输出转矩FFT分析
由表5可知,不同故障模式导致的A相电流、输出转矩频谱特性的变化规律各不相同,通过总结分析可以得出以下规律:
EMA发生机械故障(轴承卡阻、载荷路径间隙过大)相较电气电子故障(表中其它故障),A相电流谐波幅度变化大,THD值约为电气电子故障的7倍。因此,A相电流THD值能够作为基本的故障特征以判断发生的故障为机械或电气电子类型。

表5 各故障模A相电流与电磁转矩FFT分析
当机械故障引起的A相电流THD值变化基本相同时,分析输出转矩THD值的变化规律。电机轴承卡阻时输出转矩THD值约为载荷路径间隙过大时输出转矩THD值的4倍。同理,在电气电子部分故障中,传感器信号噪声干扰故障时输出转矩THD值约为控制器信号噪声干扰故障的9倍。因此,输出转矩THD值能够作为另一故障特征,区分同类故障(机械或电气电子)中不同的故障模式。
除THD值作为故障特征之外,电流及输出转矩的频谱特性可辅助确定导致故障发生的故障模式。例如,电机轴承发生卡阻故障时,A相电流频谱分布规律同正常状态,但其输出转矩频谱分布规律恰与正常状态相反;控制器输出信号产生干扰故障时,除输出转矩低频率谐波增大一倍外,相电流、输出转矩频谱分布规律基本同正常状态。
根据上述分析可知:
(1)同一故障模式下,相电流和输出转矩的THD值随故障严重程度的增加而增大。
(2)相电流THD值作为故障特征判断故障发生的类型:传递路径机械故障时相电流THD值约为电信号故障的7倍;输出转矩THD值作为另一故障特征判断同类故障中不同故障模式:传感器非指令信号故障时系统输出转矩THD值约为控制器非指令信号故障的9倍。
(3)除THD值作为故障特征之外,不同故障模式下电流及输出转矩的频谱特征可协助确定故障模式。
由此,确定系统驱动电机相电流、输出转矩为故障特征,定义谐波失真的变化阈值,建立故障判断条件,作为故障检测的推理规则。
4 结 语
EMA是机电一体化的复杂系统,故障模式不明确,本文基于EMA的工作原理与故障机理,梳理出典型的故障模式并归类,通过模型仿真分析EMA系统各环节的故障响应及变化。并提出将FFT分析方法应用于故障特征提取,将系统驱动电机相电流、输出转矩的THD值作为重要评价指标。通过FFT分析与THD值的比较,能够获取显著的故障特征与变化阈值,为带故障运行的在线检测与诊断提供理论基础。
[1] MAZZOLENI M,MACCARANA Y,PREVIDI F,et al.Development of a reliable electro-mechanical actuator for primary control surfaces in small aircrafts[C]//2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM).IEEE,2017:1142-1147.
[2] CAO W,MECROW B C,ATKINSON G J,et al.Overview of electric motor technologies used for more electric aircraft (MEA)[J].IEEE Transactions on Industrial Electronics,2012,59(9): 3523-353.
[3] 东华,银忠.现代故障诊断与容错控制[M].北京:清华大学出版社,2000.
[4] BALABAN E,SAXENA A,NARASIMHAN S,et al.Experimental validation of a prognostic health management system for electro-mechanical actuators[C]//AIAA Infotech@Aerospace,St.Louis,Missouri.2013:329-344.
[5] VINSON G,COMBACAU M,PRADO T.Synchronous machine faults detection and diagnosis for electro-mechanical actuators in aeronautics[J].IFAC Proceedings Volumes,2012,45(20): 770-775.
[6] BORELLO L,VILLERO G,VEDOVA M D.Redundant hydraulic secondary flight control systems behavior in failure conditions[C]//27th International Congress of the Aeronautical Sciences,2010.
[7] 邢琰,吴宏鑫,王晓磊,等.航天器故障诊断与容错控制技术综述[J].宇航学报,2003,24(3): 221-226.
[8] 李璠,毛海涛.飞机机电作动系统故障模式分析与故障诊断方法[J].航空维修与工程,2016,(3):47-50.
[9] BALABAN E,BANSAL P,STOELTING P,et al.A diagnostic approach for electro-mechanical actuators in aerospace systems[C]// Aerospace Conference.IEEE,2009:1-13.
[10] Docket No.NM305,Special Conditions No.25-316-SC.Special Conditions: Airbus Model A380-800 Airplane [S].Federal Aviation Administration,2006.
[11] URBANO S.Early and robust detection of oscillatory failure cases (OFC) in the flight control system:A data driven technique[C]//Aiaa Aerospace Sciences Meeting.2015.
[12] TIAN J,MORILLO C,PECHT M G.Rolling element bearing fault diagnosis using simulated annealing optimized spectral kurtosis[C]//2013 IEEE Conference on Prognostics and Health Management (PHM).2013:1-5.
[13] Moosavi S S,Djerdir A,Ait-Amirat Y,et al.ANN based fault diagnosis of permanent magnet synchronous motor under stator winding shorted turn[J].Electric Power Systems Research,2015(125): 67-82.
[14] Chen Y,Wang L,Wang Z,et al.FEM simulation and analysis on stator winding inter-turn fault in DFIG[C]//2015 IEEE 11th International Conference on the Properties and Applications of Dielectric Materials.2015: 244-247.
[15] TIAN J,MORILLO C,PECHT M G.Rolling element bearing fault diagnosis using simulated annealing optimized spectral kurtosis[C]//2013 IEEE Conference on Prognostics and Health Management (PHM).2013:1-5.