无人机影像匹配点云技术在道路测设中的应用
2018-07-03袁中朝沈彪群王生新山东省国土测绘院山东济南500山东鲁邦地理信息工程有限公司山东济南500
李 涛,袁中朝,沈彪群,高 波,王生新(. 山东省国土测绘院,山东 济南 500; . 山东鲁邦地理信息工程有限公司,山东 济南 500)
横断面测量指的是测量中桩处垂直于中线方向的地表起伏形态的作业,然后绘制成横断面图,供路基、边坡、特殊构造物的设计、土石方的计算和施工放样之用[1]。在高速公路、铁路等线路工程测量中必须进行横断面测量。由于大型线路工程路基宽、设计精度要求高、纵横断面密度大,特别是在丘陵或山区地表高差变化大、通行不便的测区,使用传统方法测量采集高程点数量有限,横断面工作效率较低,一旦改线还需要重新进场测量,不仅生产成本高,而且严重影响设计工期,不能适应当前社会发展。
近年来,随着我国经济的高速发展,无人机在各行各业均呈现出一片欣欣向荣的景象,特别是在地理信息行业,无人机航摄正对传统测绘手段带来一次跨越性的飞跃。作为专业的测量型无人机,PPK、免像控技术、倾斜摄影技术正极大地提升着影像定位精度与高程精度[2],同时主流的无人机处理软件如AgiSoft PhotoScan、PIX4D Mapper、Smart 3D Capture等支持影像匹配点云功能。点云数据作为一种全新的地理信息产品,其巨大应用价值在工程测量领域正逐步显现[3]。本文以某高速公路测设项目为例,采用天狼星免像控无人机航摄设备获取高分辨率影像,利用影像匹配点云技术与LiDAR点云处理工艺制作生成密集地面高程数据,进而取代公路测设过程最耗时耗力的断面测量工作,不仅大幅提高作业效率、降低生产成本,而且为道路改线、任意断面设计、BIM系统应用带来极大便利。
1 无人机影像匹配点云技术优势
1.1 无人机影像匹配点云为时代产物,顺势而生
影像匹配问题一直是摄影测量与遥感、计算机视觉等领域研究的热点,影像匹配技术是实现自动寻找同名像点,实现空中三角测量计算,生成正射影像的关键[4]。采用传统摄影测量方法获取高精度DEM数据,虽然精度高,但是费时费力,工作量巨大,采用雷达点云方式生成DEM自动化程度较高,但需要投入价格高昂的专业LiDAR设备,数据获取成本非常昂贵,这也是导致点云数据应用难以在生产中普及的主要原因。而无人机影像匹配点云技术结合传统航摄与LiDAR两者的优点,采用一种轻量级的装备拥有了点云获取的能力[5]。
1.2 AgiSoft PhotoScan多视点影像匹配技术实现无人机海量点云数据快速输出
AgiSoft PhotoScan是一款将影像自动生成高质量三维模型的软件,也是目前主流的无人机影像处理软件,无需设置初始值,无需相机检校,它根据最新的多视图三维重建技术对任意照片进行处理,通过给予的控制点,生成真实坐标的三维模型。整个工作流程无论是影像定向还是三维模型重建,其过程均完全自动化。高精度天狼星无人机航空测图系统MAVinci Desktop结合AgiSoft PhotoScan软件,可以轻松实现无人值守方式一键获取DOM、DEM与原始点云数据[6]。
1.3 MAVinci Desktop航空测图系统制定飞行计划实现智能化管理
MAVinci Desktop是一款专业的无人机飞控软件,可以提前根据测区范围制定飞行计划,或者根据测区需要由作业者临时指定目标区域和指定期望的GSD进行创建飞行计划(如图1所示)。该软件可以直观高效地处理从简单到复杂的多种飞行任务,如设置与线路工程走向一致的带状飞行计划、覆盖视线范围内最大范围的螺旋状飞行计划等,其中自适应地形起伏飞行模式可以获取超低空高分辨率地面影像,不仅保证了恒定的影像重叠度,而且为获取高精度影像匹配点云奠定了基础[7]。
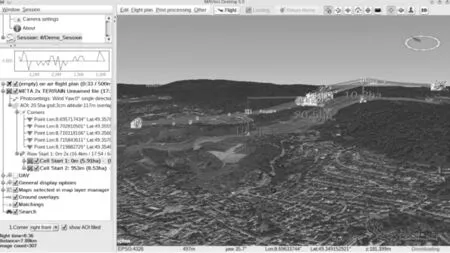
图1 带状与自适应地表起伏飞行模式
1.4 天狼星SIRUS Pro无人机助推影像点云匹配技术在生产领域成功应用
无人机航测作为一种新型的低空遥感影像获取手段,是传统高空航空摄影与中低空航空感影像获取的有效补充,具有响应速度快、灵敏度高、使用成本低、操作简便的特点[8]。天狼星SIRUS Pro无人机高精度航空测图系统,借助RTK技术,在采集相片的同时进行RTK测量,每张照片都具有RTK固定解精度的位置信息。通过整合精密测时和高精度定位技术,使得天狼星无人机在空中即可完成传统的地面像控。即使在完全免像控模式下也可以实现5 cm的定位精度,这从根源上保证了航片空间相对位置关系,也是空三加密后实现高精度影像匹配点云的基础。
2 工程实例
2.1 工程概况
本工程为莱芜市境内某高速公路定测阶段进行的横断面测量项目,线路设计里程为85 km,平均海拔为210 m,最低海拔为170 m,最高处为280 m。测区大部分位于微丘和重丘区,地貌比较破碎;测区地表以稀疏果园和低矮农作物为主,大部分区域地表裸露,对无人机航飞点云噪点剔除比较有利。技术要求:按照对应中桩桩号采集横断坐标,在地形坡度变换处必须采集坎上坎下高程坐标[9]。
2.2 实施方法
外业航测设备采用天狼星免像控无人机,将测区范围线导入MAVinci Desktop飞行计划软件中设定GSD(地面采样间隔)为3 cm,使用带状飞行计划、自适应地形起伏模式,相对行高为120 m;航向重叠度为80%,旁向重叠度为65%;平均每架次飞行长度为3 km,带宽为200 m,续航时间为30 min。
2.3 无人机影像匹配点云工作流程
无人机影像匹配点云工作流程如图2所示。

图2 无人机影像匹配点云工作流程
2.4 检测方法
天狼星无人机影像匹配点云技术已经在1000多千米高速公路地形图测量中经历无数次精度检验,具有较高的数据可信度;本次横断面测量采用传统测量方式进行验证,人工采集线路长度为5 km,断面点数量约14 800点。文中为便于展示仅选取 3个断面,更多断面与此类似(如图3、图4所示)。
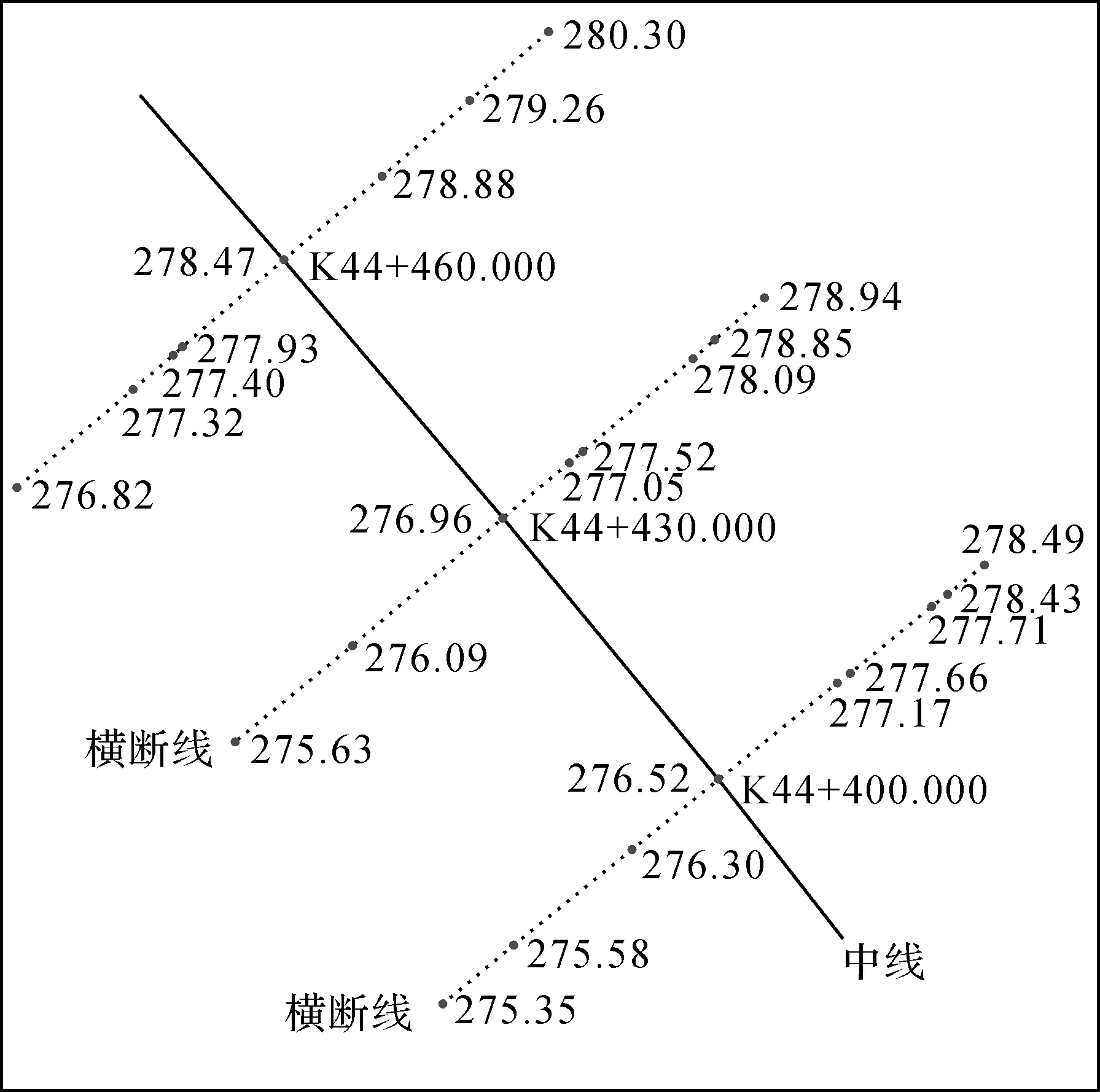
图3 传统断面测量地面高程点
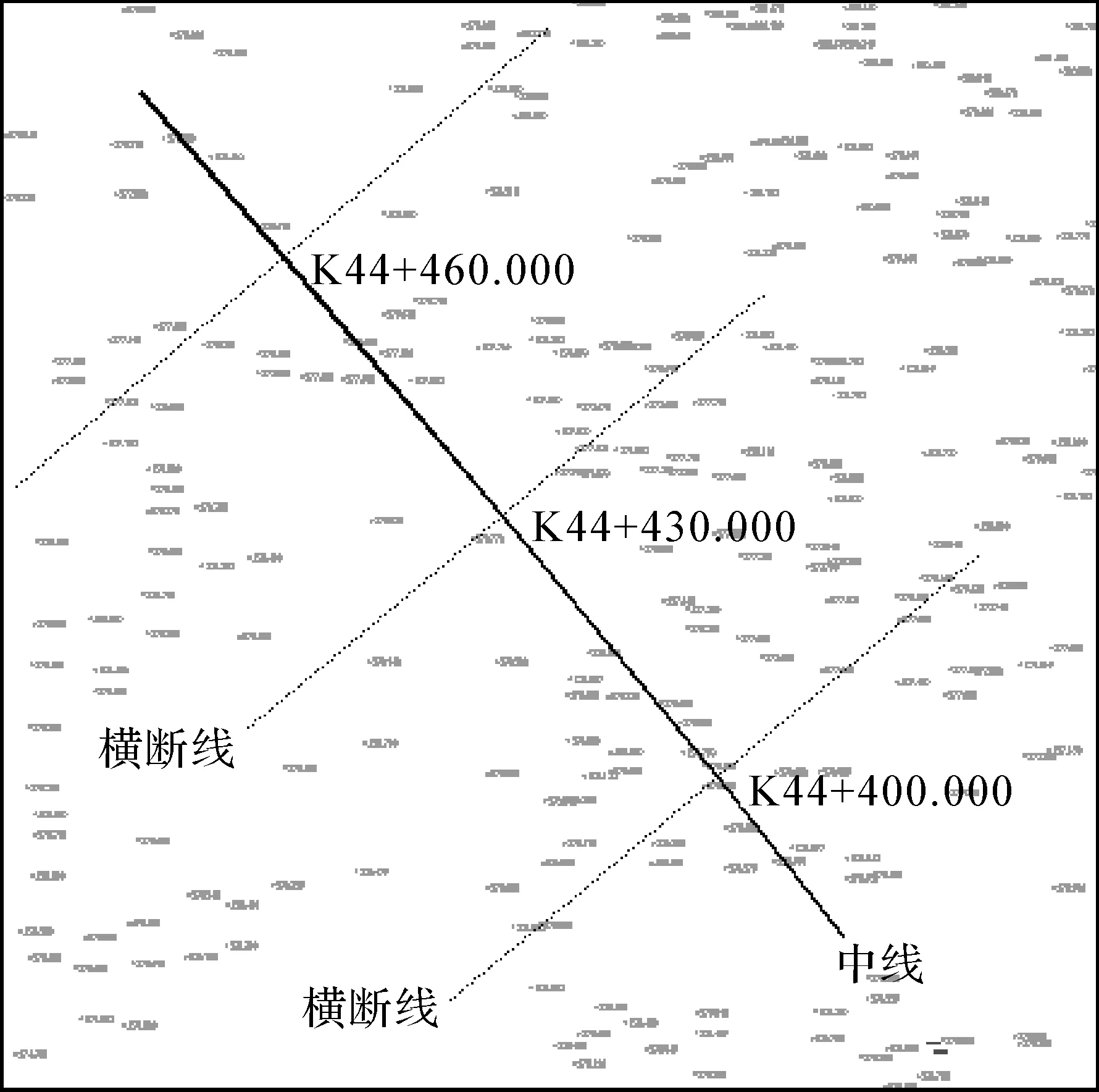
图4 利用无人机匹配点云获取地面高程点
根据2种断面线叠加分析(如图5所示)可以看出2种断面线基本吻合,但是存在稍许偏差,主要原因为点云点位与人工实测点位不完全一致,另外人工采集断面点也存在取舍,2种方式生成的断面线不完全吻合也属于正常现象。
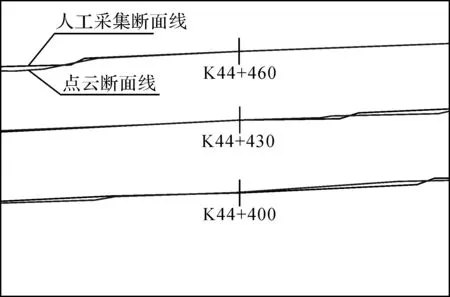
图5 2种断面线叠加分析
3 土方量计算与精度分析
3.1 土方量计算
利用以上2种不同数据获取方式生成DTM三角网文件,使用CASS软件DTM法土方计算功能进行比较(如图6、图7所示),K44+400至K44+460三条断面间计算结果为挖方量366.6 m3,填方量265.7 m3,填挖方平衡量99.9 m3,地表面积3600 m2,对地表高度整体影响约3 cm;扩大检测范围,对K44+220至K44+500 30条实测断面和无人机匹配点云进行比较,计算结果为总挖方量2 723.8 m3,总填方量2 490.4 m3,挖方平衡量相差约233.4 m3,地表面积21 355 m2,对地表高度整体影响约11 cm。
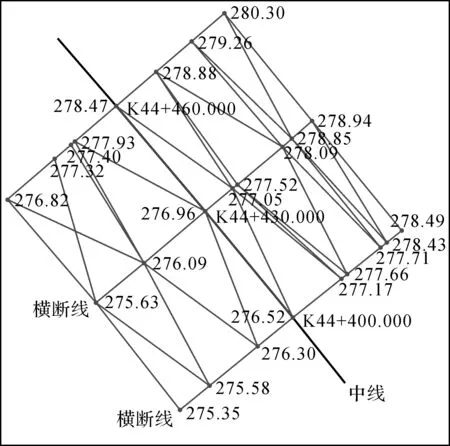
图6 利用实测横断线建立DTM格网
3.2 断面测量方案对比
由于以上2种方式高程点获取手段截然不同,传统断面测量在指定断面线上精度较高,但是两断面线之间缺少数据构建DTM模型精度不高,测量精度与地性线位置断面加桩及作业人员的工作经验关系较大;无人机匹配点云方式更倾向于方格网法,其点云密度基本达到2 m×2 m(在裸露地表点云密度可以达到0.5 m×0.5 m),在点云精度可靠的情况下可以获取非常精确的土方量结果(见表1)。
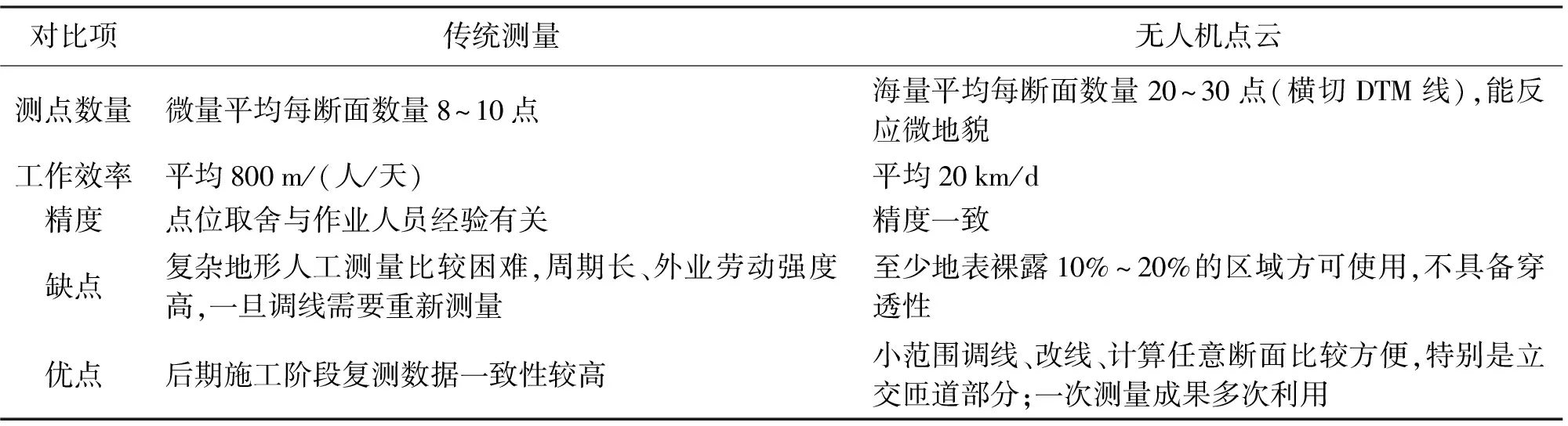
表1 横断面测量方案对比
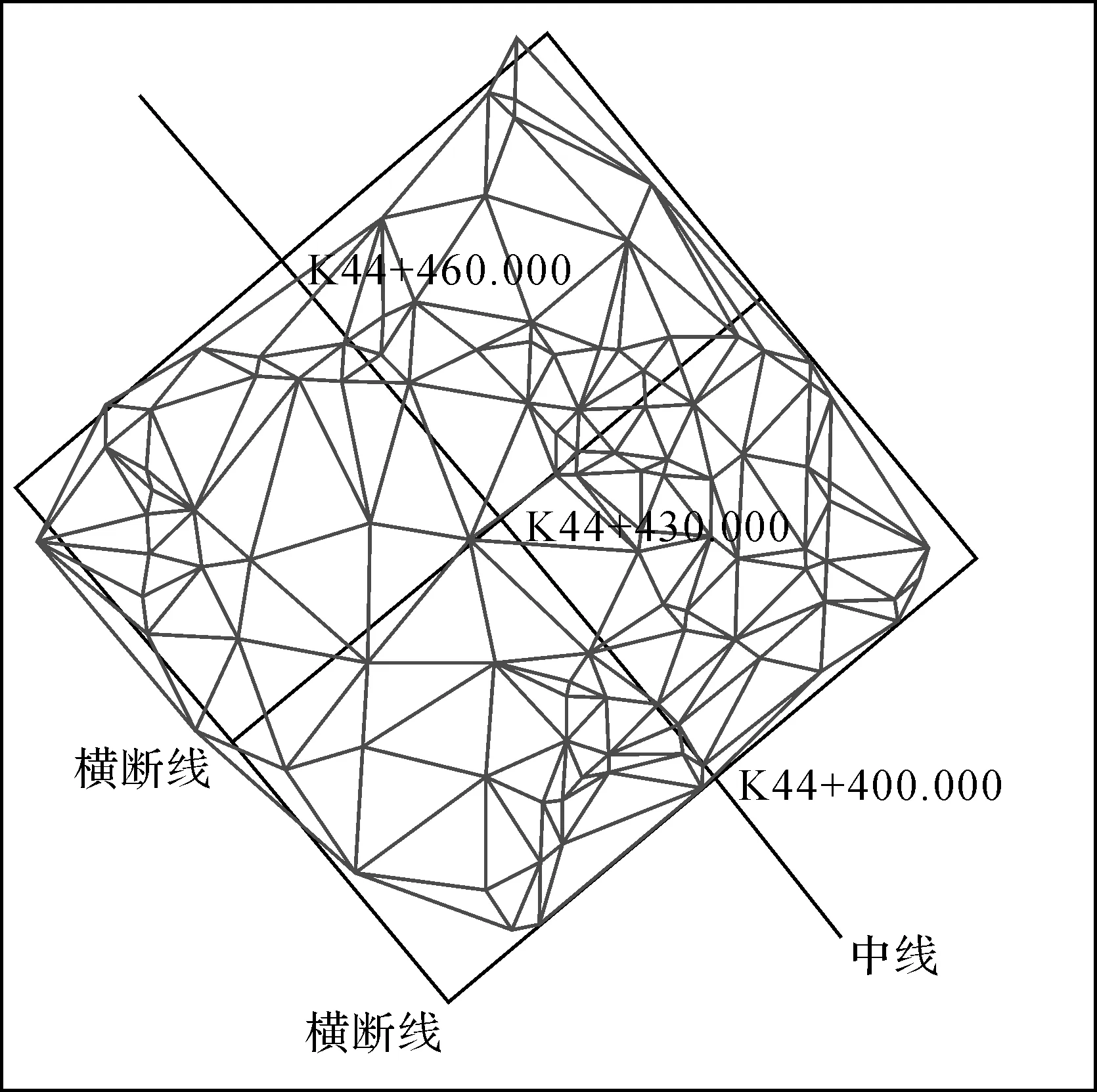
图7 利用点云建立DTM格网
4 结 语
机载LiDAR高昂的设备价格和复杂的数据处理流程制约了用户群体和应用方向[10]。随着科技手段的进步,点云获取不再是机载LiDAR的专属手段,平民化价格的无人机同样可以实现。尽管测绘原理不同,获取的数据精度尚不能与机载LiDAR相媲美,然而无人机影像匹配点云技术作为一项全新技术手段有着非常广阔的应用前景。但是,其应用还有待通过更多的案例进行验证和完善,特别是需要进一步优化点云分类算法并降低数据处理难度[11]。
利用无人机影像匹配点云取代传统断面测量可为类似工程项目提供参考借鉴。
参考文献:
[1] 张峰.GPS-RTK在高速公路横纵断面测量中的应用[J].黑龙江科技信息,2012(12):16.
[2] 王俊雷,王耀兴,张新建,等.天狼星无人机系统在黄河地形中的试验与分析[J].测绘通报,2017(S1):173-175,184.
[3] 李涛.天狼星无人机航摄系统在复杂地形测量中的应用与精度分析[J].测绘通报,2017(12):146-148,152.
[4] 陈启晟.无人机影像匹配点云三维构网算法的研究[D].南昌:东华理工大学,2016.
[5] 于凤月.无人机摄影测量系统应用于大比例尺DEM、DOM试验分析[D].昆明:昆明理工大学,2017.
[6] 秦川.无人机影像匹配点云滤波处理与三维重建[D].成都:西南交通大学,2015.
[7] 狄桂栓,沈彪群,高波,等.免像控无人机航摄系统在公路带状地形测量中的应用与精度分析[J].测绘通报,2017(2):159-160.
[8] 严慧敏,王飞.天狼星无人机航测系统在水利工程测绘中的应用[J].测绘通报,2017(7):158-160.
[9] 岳宏智.GPS-RTK在公路纵横断面测量中的应用[J].山东交通科技,2006(1):70-72.
[10] 田超,陈杰,李能能,等.利用无人机免像控快速构建高精度DSM[J].测绘通报,2017(8):158-160.
[11] 黄迟,张汉德,范学炜,等.基于纵横断面的机载雷达点云数据滤波[J].测绘科学,2015,40(11):34-38.