一种评价三维控制网精度的方法
2018-07-03张翼飞金利民樊奕辰祝万钱中国科学院上海应用物理研究所上海201204
张翼飞,金利民,樊奕辰,祝万钱(中国科学院上海应用物理研究所,上海 201204)
全局测量与精度控制是大型粒子加速器精密准直安装的基础,决定着整个粒子加速器整体的性能表现。为提高整体空间测量精度,同时解决顶级尺度问题,必须在全局空间内布设高精度三维控制网[1-2]。以上海光源为例,三维控制网覆盖了20 m长的直线加速器、周长180 m的增强器、周长432 m的储存环,以及沿环外侧分布的同步辐射光束线和实验站[3]。从空间分布上看,上海光源的三维控制网分为储存环控制网和实验大厅光束线控制网[4]。储存环控制网是加速器磁铁安装的基准,用于调整磁铁之间的相互位置关系,保证束流轨道的精度[5]。实验大厅控制网用于光束线部件的安装定位,保证同步光可以按照物理设计的要求通过各种光学元件,转变成试验所需的光。一般光束线部件的准直定位精度要求为0.2 mm[5-6]。
储存环与实验大厅光束线控制网之间有很小的通光孔,通视条件极差,必须跨越屏蔽墙才能完成转站测量,这无疑会增加测量的不确定性,因此评价控制网转站测量的误差显得格外重要。一般采用点位误差的方法对控制网点的精度进行评价,点位误差能够直观反映点位在各方向上误差的大致数值[7]。从可视化的角度来看,用点位均方差为半径的圆、球、超球可以近似描述点位误差的大致分布[8-9]。但是对于由若干点组成的控制网来说,点位误差并不能直观给出控制网整体的偏差。本文根据储存环控制网与光束线控制网的空间分布特点搭建模型,引入基准点坐标偏差的概念,用于评价转站测量引起的光束线控制网偏差,并尝试通过闭环测量的方法减小这种偏差。
1 基于基准点坐标差的控制网模型
上海光源光束线的控制网转移只能在停机维护的时候进行,因此有必要先搭建一个模型进行相关的试验。
1.1 搭建包含基准点的控制网实验模型
在上海光源某空闲的光学棚屋内,搭建如图1所示的试验模型:棚屋长约30 m,宽5 m,有一号和二号两个设备运输门。在棚屋内尽量等间距布置8个基准点(实心点A—H),棚屋内布置若干控制网点(空心点)。
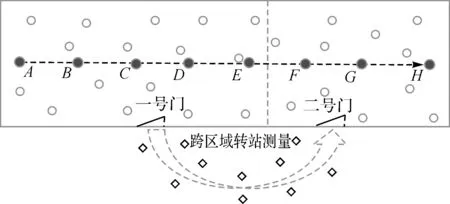
图1 基于基准点坐标偏差的控制网模型
1.2 基准坐标系的建立及基准点调节
众所周知,跟踪仪是基于角度传感器和测长技术相结合的球坐标测量系统,其长度测量采用激光干涉测长方法,可直接溯源至激光波长,因此激光跟踪仪的测长精度远高于测角精度,其中角度传感器又分为垂直角和水平角两种[10-11]。为了尽可能保证跟踪仪的测量精度,先将8个基准点大致就位,跟踪仪放置于8个基准点中间。将跟踪仪分别连接至A点和E点,调节A点和E点位置,当跟踪仪垂直角显示为90°时,锁紧A点和E点,如此则最大限度地保证了跟踪仪的测量精度,然后根据这两个基准点建立基准坐标系。
基准坐标系:以A点为坐标原点、A点和E点连线为Y轴、垂直向上为Z轴建立基准坐标系,然后将其余6个基准点都调节到Y轴上。基准坐标系是所有后续试验的基准,包含了最准确的基准点坐标信息,图2为基准点坐标的调节过程。
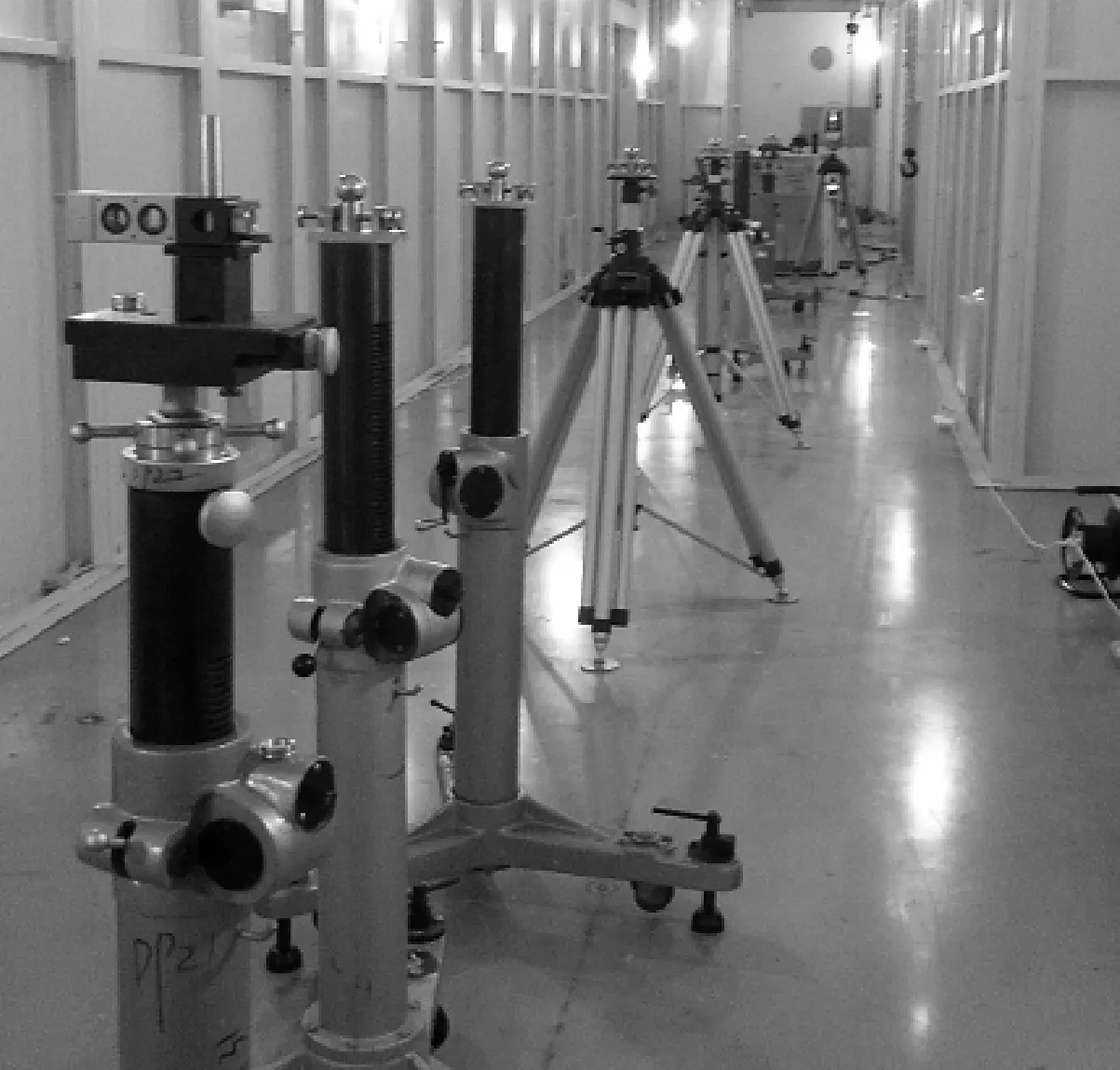
图2 基准点坐标调节
基准点测量:基准坐标系和基准点调节到位以后,为了获得更加准确的基准点位置信息,设置跟踪仪自动测量模式,从A点到H点为一次测量,共计测量40次。然后将每一个基准点40次测量的平均值作为最终的理论坐标值。表1为基准坐标下各基准点的理论坐标值,基准点理论坐标值拟合直线的直线度为0.024 mm(RMS),基本达到了跟踪仪的测量极限精度。
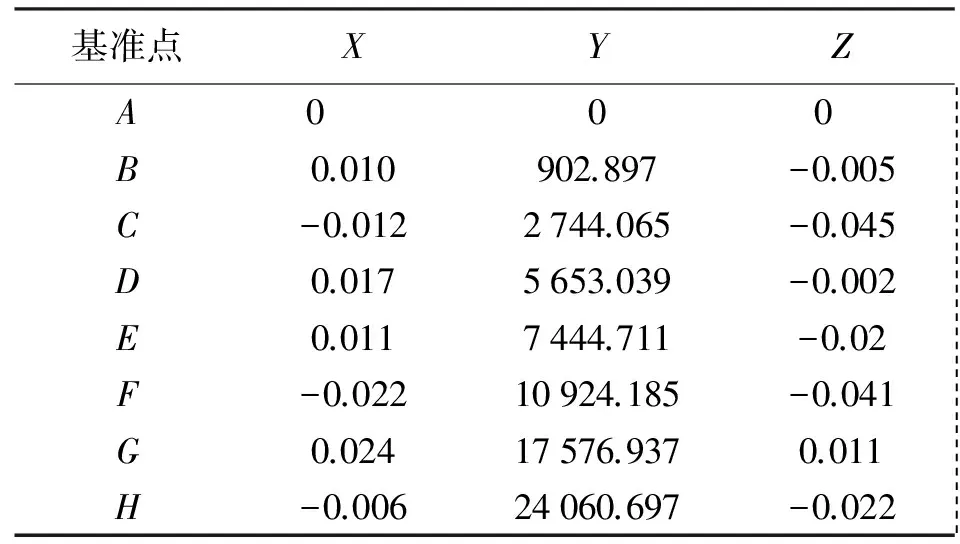
表1 各基准点理论坐标值 mm
2 模拟光束线控制网转站测量
为了更加真实地模拟光束线控制网的转站过程,根据设备运输门在整个棚屋的位置,在基准点E和F之间人为隔断,将其想象为储存环到光束线之间的屏蔽墙,如图1中虚线所示,要想将两个区域控制网的融合,必须通过两个门搭建临时点才能完成。
2.1 控制网转站测量
从基准点A附近控制网点开始测量,首先测量A—E点区域,然后通过搭建临时点(图2中的菱形点),从一号门转出,二号门转入F—H区域,共计完成12站测量。F、G、H3个基准点相当于待测点。
将12站测量数据统一进行平差处理。平差有多种方法[12-13],本文用到的是SA软件自带的平差处理方法。最终得到包含了A—H基准点的全部控制网点,将其中8个基准点拟合直线,直线度为54 μm(RMS)。直线度是转站测量前的2倍,F、G、H这3个基准点的X和Z方向出现较大偏差。表2为基准坐标下各基准点的坐标值及偏差。
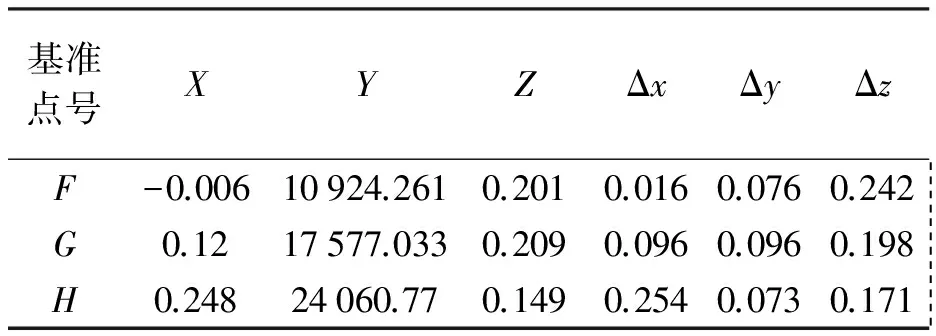
表2 跨区域转站测量后基准点坐标偏差 mm
表2数据表明,转站测量给F—H区域控制网引入明显偏差。而实际的光束线控制网转站测量过程中,由于转站条件更加恶劣,控制网的偏差可能会更大。因此必须引入其他约束条件来降低控制网的偏差。
2.2 闭环测量对基准点偏差的影响
研究表明[14-15],闭环测量可以有效约束控制网的转站测量误差。因此在上节测量过程中的基础上,在E点和F点之间引入一站,形成闭环测量。光束线控制网转站测量过程中,也可以利用蔽墙上的通光孔,测量一站形成闭环。
对全部测量站位的数据重新平差处理,得到包含A—H点的控制网,8个基准点拟合直线的直线度为0.036 mm(RMS),较未闭环测量前有所改善。表3为在基准坐标下F、G、H的坐标值及偏差。
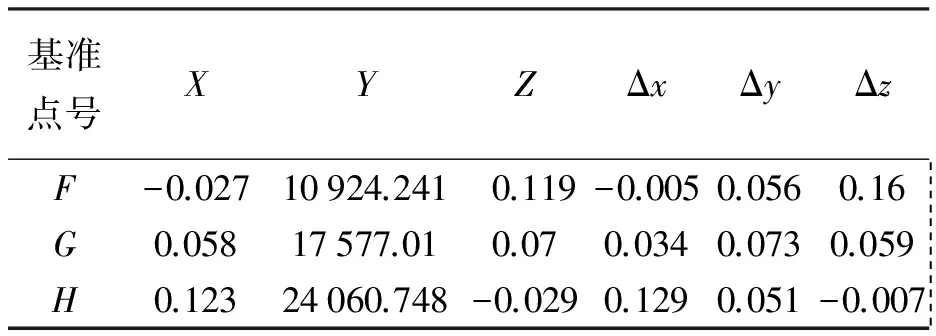
表3 闭环测量后基准点坐标偏差值 mm
表3中的数据显示,在基准坐标系下,3个点坐标值偏差值有了明显的收敛,闭环测量可以有效降低控制网转站的偏差。
3 试验大厅光束线控制网转站测量精度评价
在上海光源某光束线控制网转站测量的过程中,引入3个基准点用于精度评价。
3.1 光束线控制网转站测量精度评价
在光束线区域一侧调整A、B、C这3个基准点至一条直线,如图3所示。在加速器储存环一侧,通过通光孔可以直接测量这3个基准点。根据储存磁铁布局,建立引出同步光的基准坐标系,同步光轴线为Y轴,同时直接测量3个点的坐标值。
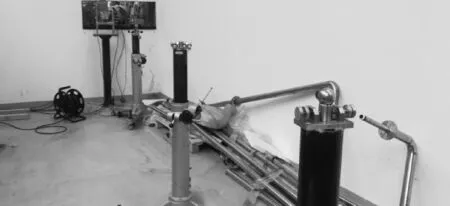
图3 光束线区域基准点调节
经过转站测量、平差计算,得到光束线控制网,同时也得到基准点的坐标值,这与在储存环内直接测量的坐标值,有着明显的偏差,表4为3个基准点的坐标偏差。

表4 基准点在不同测量环境下的坐标偏差 mm
表4的数据表明,经过转站测量的光束线控制网,Z向最大偏差为0.53 mm,X向最大偏差为0.13 mm,即为光束线控制网偏差的直观表现。为了降低控制网的偏差,根据上节测量结果,利用屏蔽墙上的通光孔增加一站,形成大的闭环。
3.2 闭环测量对光束线控制网的影响
在通光孔内增加若干临时点,在储存环和光束线区域两侧都可以测量到这些临时点。将两站测量数据导入上节的测量数据中,重新计算后得到闭环条件下控制网。表5为闭合测量条件下3个基准点的坐标偏差。经过对比表4与表5的数据可以发现,在闭环条件下,基准点坐标偏差改善明显,但是尚未达到最佳。

表5 闭环条件下基准点的坐标偏差 mm
4 结 论
采用基准点坐标偏差及直线度的方法可以准确地判断光束线控制网偏差的方向和大小。搭建的试验模型模拟光束线控制网转站测量,直线度增大1倍,基准点坐标偏差明显,引入闭环测量可以有效提高直线度,并降低基准点坐标偏差。在上海光源某光束线的控制网转站测量过程中,引入3个基准点,发现光束线控制网Z向偏差高达0.5 mm,X向偏差也将近0.2 mm,引入闭环测量后Z向偏差降低至0.25 mm左右,X向偏差降低至0.1 mm以内。目前,该方法虽然可以有效判断控制网偏差的方向与大小,但改进措施和效果都比较有限。因此,后续的工作重点在于,如何基于这种控制网精度评价方法寻求更加有效的改进措施。
参考文献:
[1] 林嘉睿,邾继贵,郭寅,等.现场大空间测量中精密三维坐标控制网的建立[J].机械工程学报,2012,48(4):6-77.
[2] 张皓琳.坐标转站精度及其影响因素的研究[D].天津:天津大学,2012.
[3] 于成浩,殷立新,杜涵文,等.上海光源准直测量方案设计[J].强激光与粒子束,2006,18(7):1167-1172.
[4] 于成浩,柯明,杜涵文,等.上海光源的一级平面控制网[J].原子能科学与技术,2009,43(10):931-934.
[5] 于成浩.三维测量技术在上海光源中的应用[D].北京:中国科学院研究生院,2008.
[6] 柯明,于成浩.关节测量臂在上海光源元件标定中的作用[J].强激光与粒子束,2009,21(12):1885-1888.
[7] 孙海丽,姚连璧,周跃寅,等.激光跟踪仪测量精度分析[J].大地测量与地球动力学,2015,35(1):177-180.
[8] 施一民,朱紫阳.论相对点位精度的合理评定[J].测绘科学,2004,29(2):28-33.
[9] 卞和方,张书毕,张秋昭,等.点位误差位置相关性分析及验证[J].中国矿业大学学报,2013,42(1):129-133.
[10] 林嘉睿,邾继贵,张皓琳,等.激光跟踪仪测角误差的现场评价[J].仪器仪表学报,2012,33(2):463-468.
[11] 于成浩,柯明.基于激光跟踪仪的三维控制网测量精度分析[J].测绘科学,2006,31(3):25-27.
[12] 周维虎,丁蕾,王亚伟,等.光束平差在激光跟踪仪系统评定中的应用[J].光学精密工程,2012,20(4):851-856.
[13] 李希峰,岳东杰,卫柳艳.赫尔默特方差分量估计在混合水准平差中的应用[J].现代测绘,2005,28(5):20-22.
[14] 金正琪.提高激光跟踪仪转站测量精度的技术研究[D].杭州:浙江大学,2013.
[15] 马娜,董岚,梁静,等.中国散裂中子源直线加速器控制网测量及精度研究[J].测绘通报,2016(1):104-107.