篮球队员协作模式在多收割机械协同作业中的应用
2018-07-03杨绍昌
胡 俊,杨绍昌
(保山学院,云南 保山 678000)
0 引言
众所周知,蚁群算法是优化领域中新出现并逐渐引起重视的一种仿生进化算法,它是群体智能的典型实现,是一种基于种群寻优的启发式搜索算法。自从1991年首先提出蚁群算法以来,这种新型的分布式智能模拟算法已逐渐引起人们的注意并得到广泛的应用。蚁群算法采用分布式并行计算机制,易于其他方法结合,而且具有较强的鲁棒性,可以实现多路径的协同搜索,因此可以将其使用在篮球队员协作最佳投篮地点的搜索算法中。同理,在收割机编队作业时,为了保持多台收割机同时作业的效率最佳,可以对其行进路径进行合理的规划,保证在最短的行驶距离完成相关作业,从而降低收割机空行而造成的时间浪费,提高作业的速度和质量。
1 篮球运动员协作模式及其在农机协同作业中的应用
对于那些开放性的、同场对抗类的集体竞技项目来说,如篮球、足球等,运动决策的水平直接影响着运动员运动能力和技战术水平的发挥。篮球比赛属于高度协作的比赛模式,队员的协同决策直接影响到球队的总体得分,这就需要各个队员在协作的同时,能够规划出最佳的进攻位置和防守位置,并选择最佳的地点投篮得分。
如图1所示:为了实现最佳的进攻位置和防守位置的规划,并选择最佳的地点投篮得分,将蚁群算法引入到了路径规划搜索算法中,进行大规模农机协同作业。
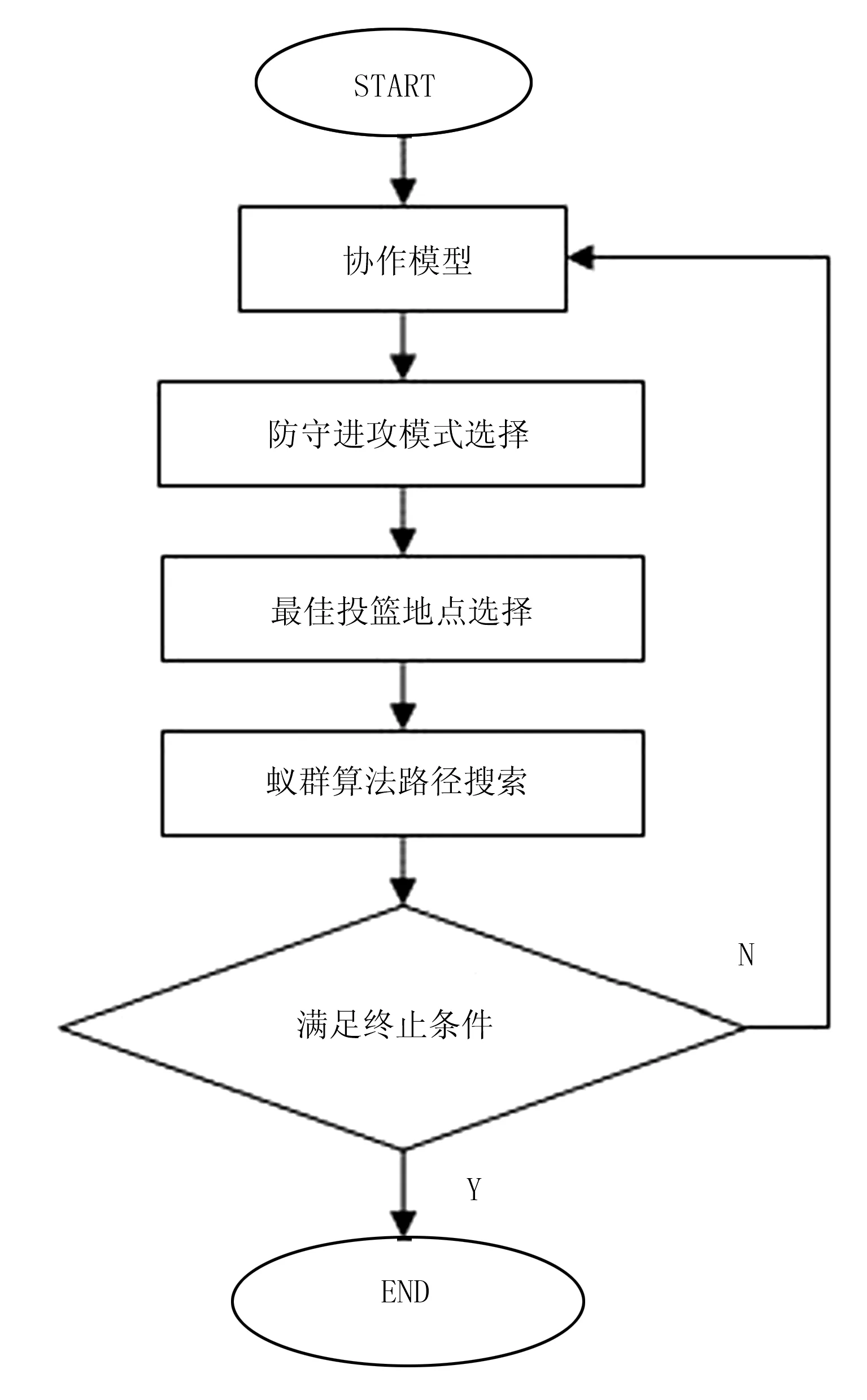
图1 基于蚁群搜索算法的篮球队员协作模式
由于人为因素可能导致农机空驶或者闲置,造成资源浪费,利用农组织结构图、状态统计栏可以直观表示农机的隶属分布和在线情况,从而实现协同路径规划,如图2所示。
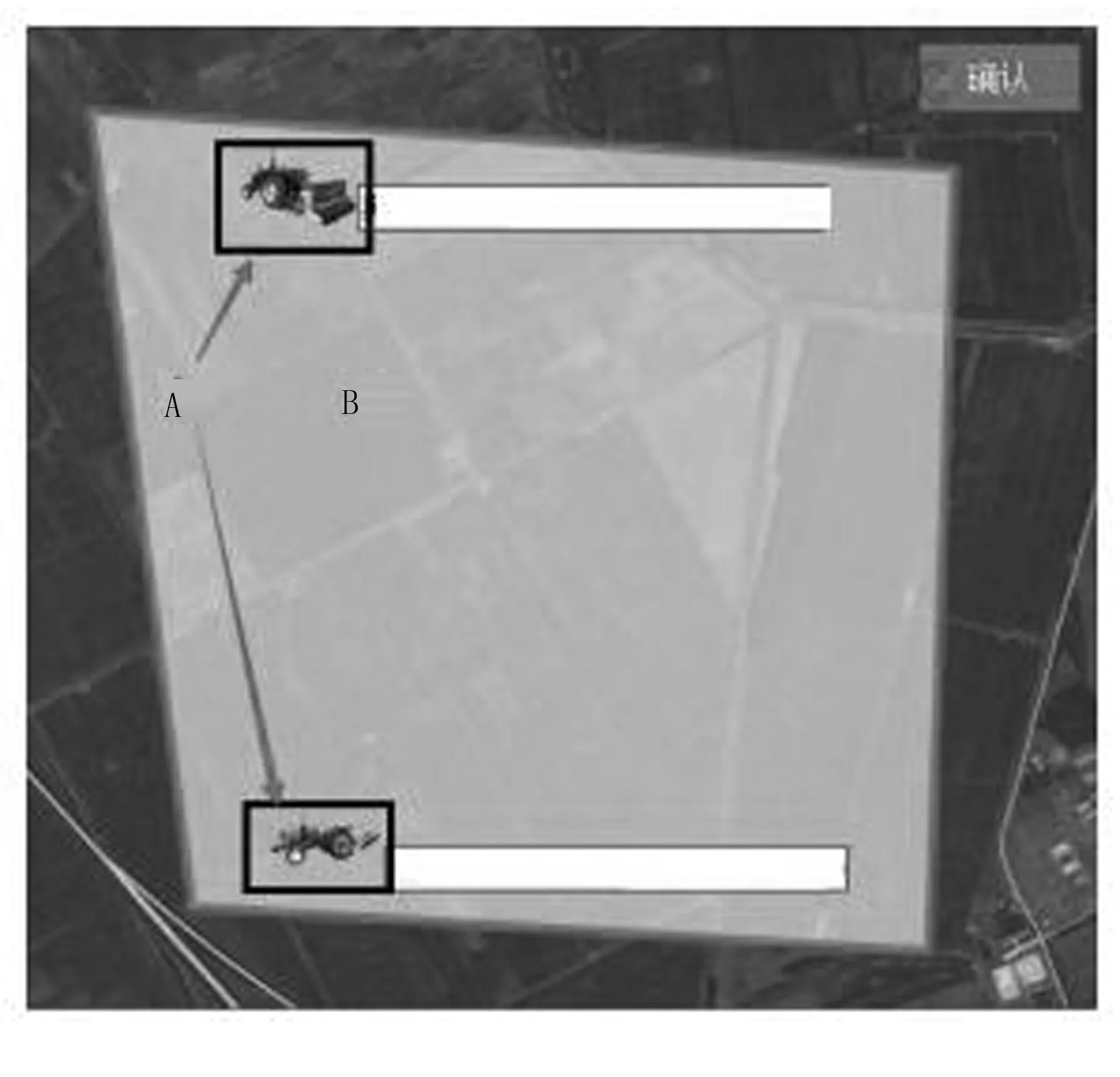
图2 农机协同信息化作业
在大规模农机作业时,利用现代通信和计算机技术,可以实现农机作业的实时监测功能,从而为农机编队和路径规划提供技术支持。本次研究将基于篮球协作模式的蚁群搜索算法引入到收割机收割作业编队中,为提高其协同作业效率提供技术支持。
2 基于蚁群的最优路径搜索算法
蚁群算法可以实现最优路径的搜索,其搜索依据是地图数据库信息,搜索过程是判断蚂蚁是否在寻找实物:如果在寻找实物,则进行需找实物搜索;如果不是正在搜索实物,则进行洞穴搜索。在搜索时,将地图数据库中的每个节点编号并建立权值,以便于判断节点是否搜索过,如果搜索过,则直接进入下一个搜索周期,最后的决策采用比例决策的方法,同“轮盘赌”的方式类似。走过一条路径时,记录路径的权值,读取洞穴信息元素值,重新计算所走路径的信息元素值,更新到信息元素表中,判断下一节是否为食物,记录找到食物的次数以及路径的权值,从而可以实现路径的优化。
在蚂蚁寻找洞穴的过程中,其原理同寻找食物过程类似,直接将洞穴和食物的位置信息对调即可;然后判断目标是否为洞穴,不需要保存洞穴的数据记录,只单纯为寻找食物提供数据准备;将内存中的历史数据清空后,可以将洞穴作为初始的节点,记录找到食物的路径,其基本流程如图3所示。

图3 蚁群算法基本流程
蚁群算法的基本原理是利用蚂蚁找食、循环搜索的原理实现路径的最优记录和选择。其详细步骤如下:
1)初始化路径信息。
2)输入信息元素的初始化矩阵,选择起始位置和终点的各种参数,然后在路径搜索过程中计算路径权值等相关信息元素数据。
3)选择从起始位置到达节点的最优路径,最好可以一步到达的节点,根据节点信息求出前往每个节点的概率,利用轮盘算法计算下一个起始位置节点。其表达式为
(1)
其中,τij(t)表示搜索路径中边(i,j)上的信息素的浓度;ηij为与搜索路径边(i,j)相关联的启发式信息;α、β分别为τij(t)、ηij的权重参数。
4)更新路径,更新总的搜索路径的长度。
5) 重复3)、4)过程,在蚂蚁达到终点或无路可走时结束。
6)重复步骤3)、4)、5),直到m只蚂蚁迭代结束。
7)更新信息素矩阵,没有到达的蚂蚁不计算在内,则有
τij(t+1)=(1-ρ)·τij(t)+Δτij
(2)
(3)
其中,ρ为搜索节点的信息元素权系数;Q表示信息量增加强度;Lk(t)表示路径长度;
8)重复步骤3)~7),直至n代蚂蚁迭代结束。
利用蚂蚁算法可以快速得到最优路径,在多台收割机同时作业时,得到最优路径才能是收割机以最小的路程完成最大的工作量,从而提高收割的作业效率和质量。
3 试验验证
为了验证基于蚁群算法的篮球队员协作模式在收割机编队和协作快速路径搜索算法中应用的可行性,采用算法编程实验的方法,对方案进行了验证,首先以篮球场地为例,对算法进行试验验证。
如图4所示:以真实的篮球场地为例,在三秒区内设置了蚂蚁的食物和洞穴,然后采用蚂蚁算法对最佳三分球投篮位置进行了搜索,食物设置为最佳投篮地点,洞穴为防守人员,通过编程搜索成功实现了最佳路径的计算。
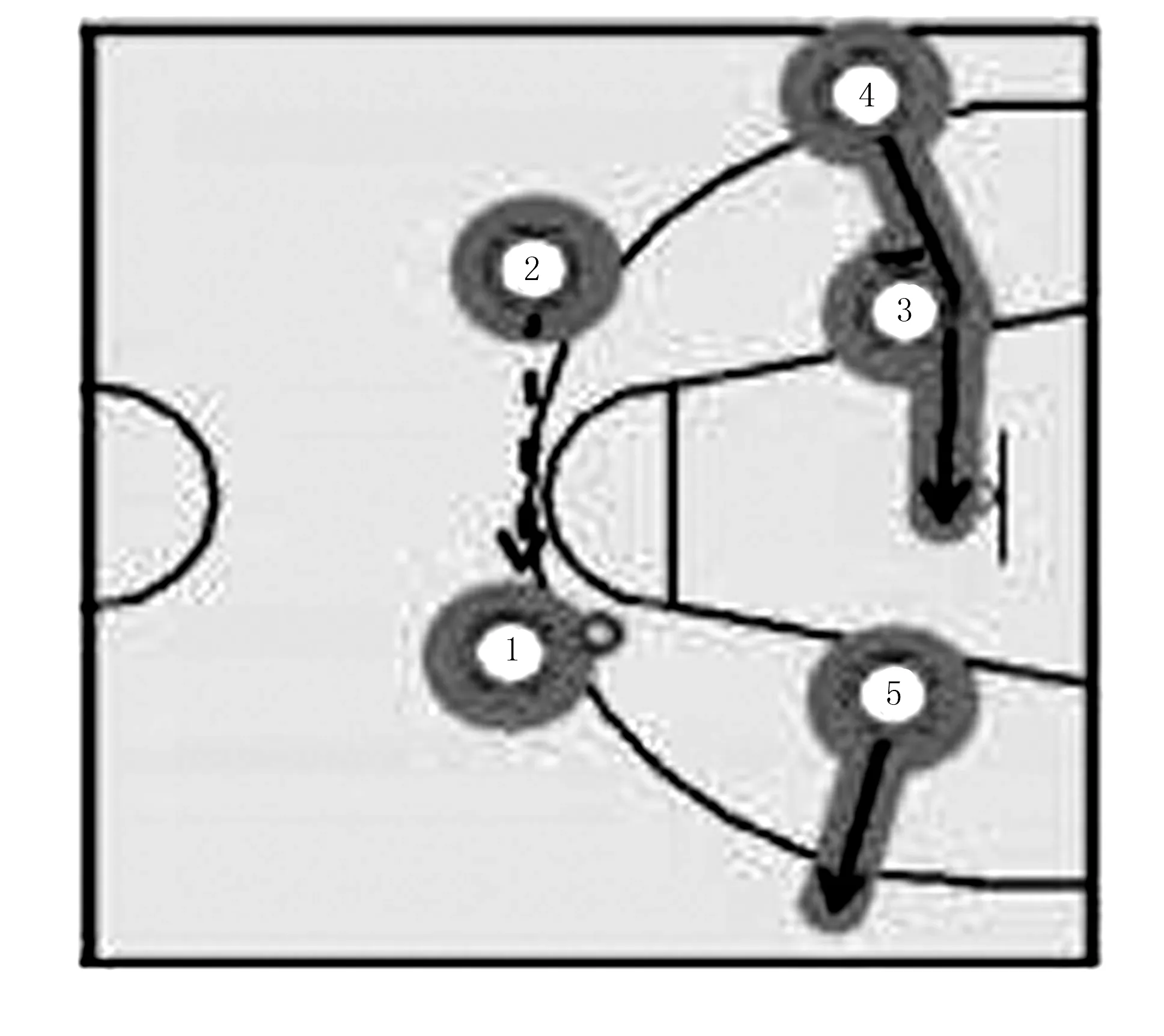
图4 蚂蚁算法篮球场地实验验证
图5表示多收割机作业的现场。在农忙时节,经常需要多收割机在同一大的地块进行收割作业, 如果收割机不合理分配路径,会造成资源的浪费,使收割机多出很多空行的工况。为了解决这个问题,将篮球队员协作模式引入了收割机路径搜索算法中,并将地块假设为0和1组成的方格矩阵,具体如图6所示。

图5 多收割机作业情境
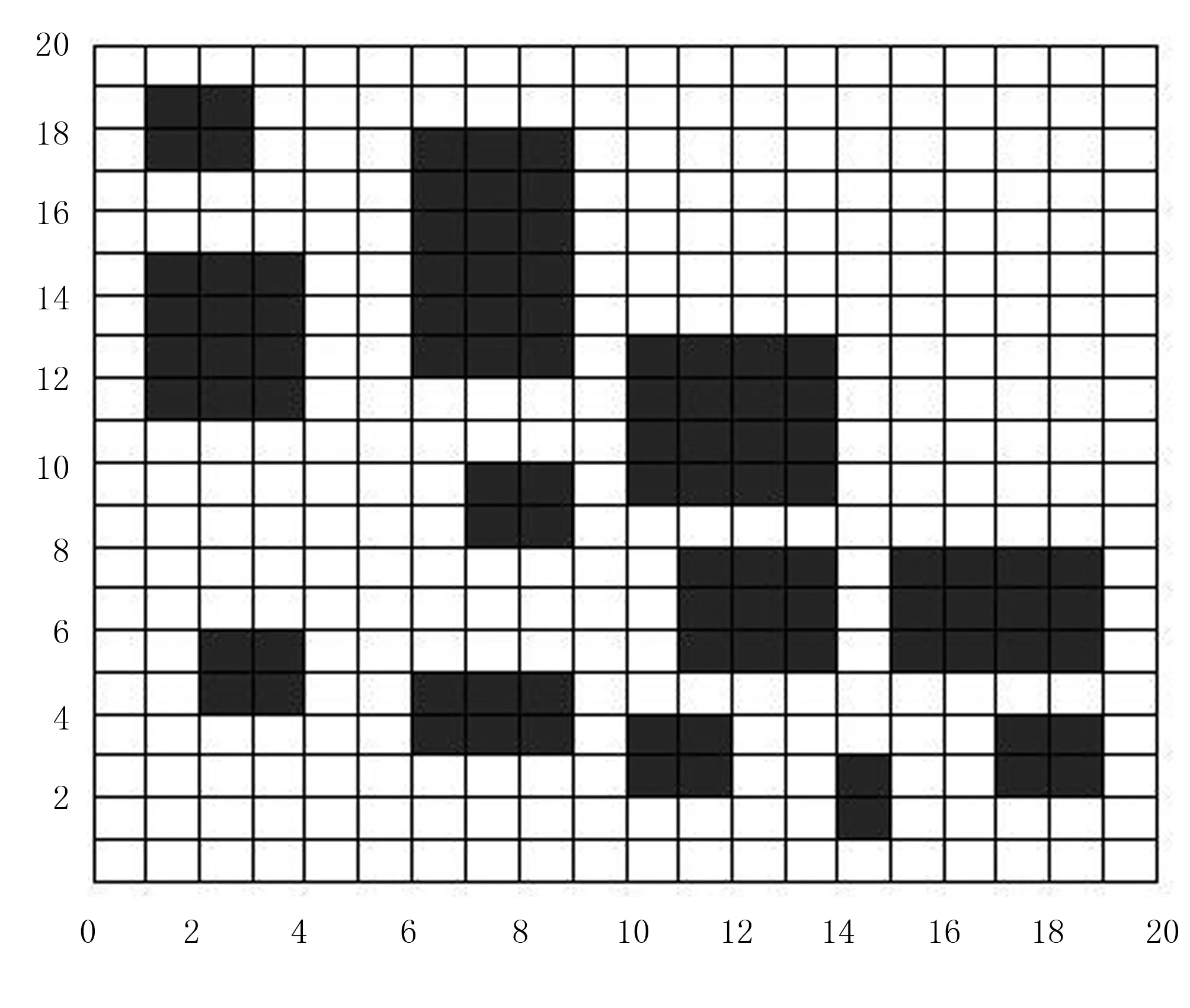
图6 收割机路径搜索方格矩阵
将收割机编队协同作业模式和不同的地块等效为0和1的矩阵形式,输入由0和1组成的矩阵表示收割机需要寻找最优路径的地图。其中,地块开阔可以通行的位置为0,地块中存在障碍物不能通行的地方用1表示。
图7为收割机路径搜点的结果。由图7可以看出:采用蚂蚁算法后,收割机可以成功地绕开障碍物,以最短的路径到达目标。在多台收割机作业时,可以采用协同搜索的方式,如图8所示。
由图8可以看出:利用蚁群算法可以使多台收割机路径最短并保持距离相同或者接近,从而保证了多台收割机同时作业时的作业效率最高。
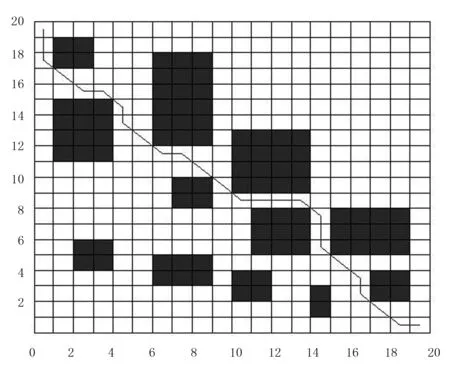
图7 收割机路径搜索结果
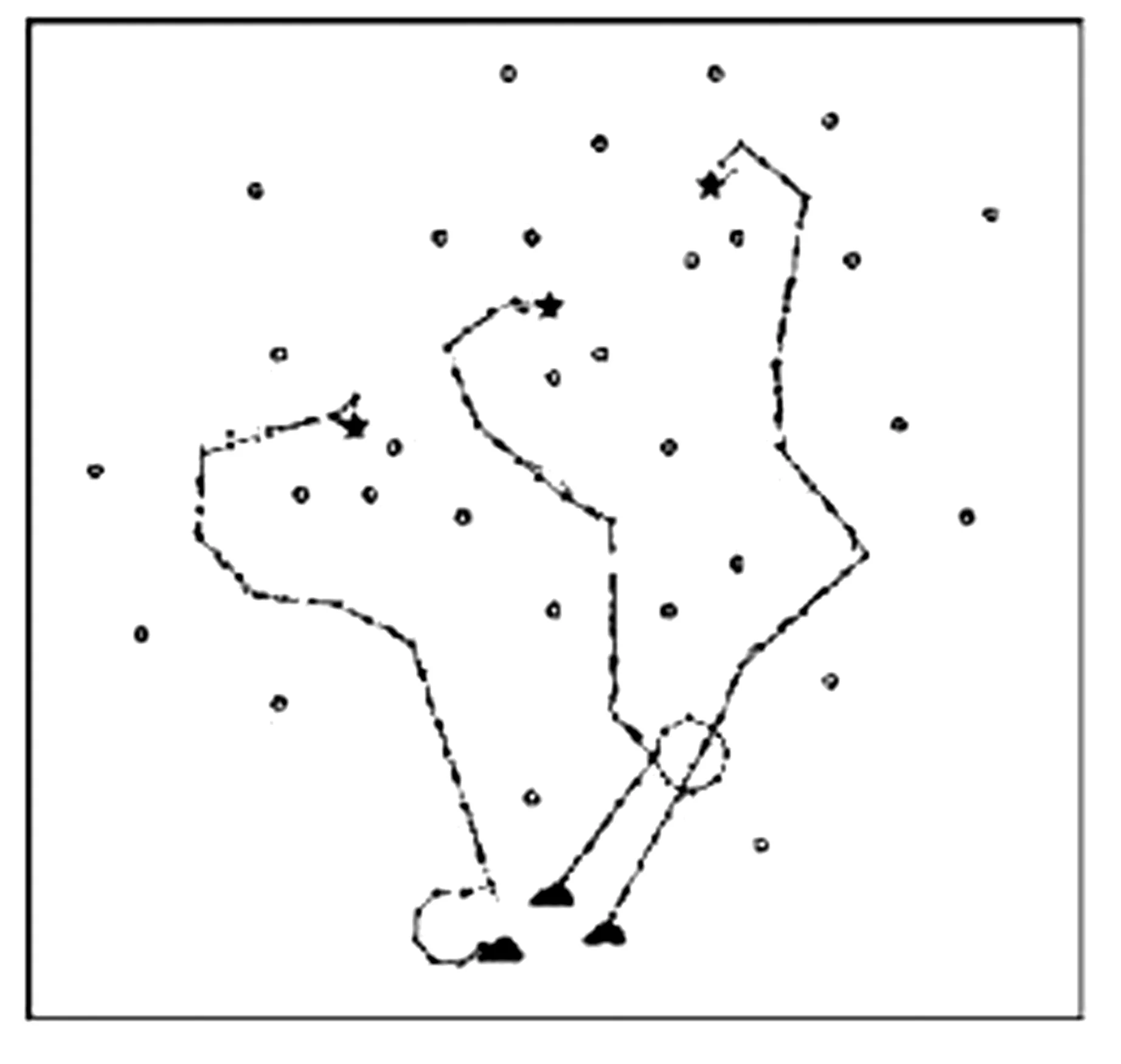
图8 等长度路径搜索结果图
4 结论
在篮球队员协作模式中引入了蚁群算法,为了验证算法的可行性,以真实的篮球比赛为例,在三秒区内设置了蚂蚁的食物和洞穴,然后采用蚂蚁算法对最佳三分球投篮位置进行了搜索。通过将食物设置为最佳投篮地点,洞穴为防守人员,通过试验成功实现了最佳路径的计算。将基于篮球协作模式的蚁群搜索算法引入到了收割机编队协同作业过程中,并通过算法试验,对多收割机协同作业的路径搜索能力进行了试验测试。试验结果表明:采用基于篮球协作模式的蚁群算法不仅可以实现单台收割机的快速最佳路径搜索,而且可以实现多收割机的等长协同路径搜索,从而提高了收割机的协作能力,进而提高了收割机群的总体作业水平。
参考文献:
[1] 朱群峰,黄磊.温室移动机器人轨迹控制系统的设计[J].农机化研究,2009,31(4):73-75.
[2] 朱大奇,颜明重.移动机器人路径规划技术综述[J].控制与决策, 2010, 25(7): 961-967.
[3] 夏梁盛,严卫生.基于栅格法的移动机器人运动规划研究[J].计算机仿真, 2012, 29(12): 229-233.
[4] 于振中,闫继宏.改进人工势场法的移动机器人路径规划[J].哈尔滨工业大学学报, 2011, 43(1): 50-55.
[5] 包加桐,宋爱国,郭晏,等.基于SURF特征跟踪的动态手势识别算法[J].机器人, 2011,33(4): 482-489.
[6] 黄志华,屠大维,赵其杰,等.基于人机交互的移动服务机器人导航系统[J].机器人,2009, 31(3): 248-253.
[7] 于美娟,马希荣.基于HMM方法的动态手势识别技术的改进[J].计算机科学, 2011,38(1): 251-252.
[8] 陈一民,张云华.基于手势识别的机器人人机交互技术研究[J].机器人, 2009, 31(4):351-356.
[9] 王洪光,姜勇, 房立金,等.双足爬壁机器人壁面凹过渡步态规划研究[J].智能系统学报,2007,2(4): 40-45.
[10] 魏泽鼎,贾俊国,王占永.基于视觉传感器的棉花果实定位方法[J].农机化研究,2012,34(6):66-68,112.
[11] 李立君,李昕,高自成,等.基于偏好免疫网络的油茶果采摘机器人图像识别算法[J].农业机械学报,2012, 43(11):209-213.
[12] 王辉,毛文华,刘刚,等.基于视觉组合的苹果作业机器人识别与定位[J].农业机械学报,2012,43(12): 165-170.
[13] 袁挺,纪超,陈英,等.基于光谱成像技术的温室黄瓜识别方法[J].农业机械学报,2011,42(增刊):172-176.
[14] 熊俊涛,邹湘军,陈丽娟,等.采摘机械手对扰动荔枝的视觉定位[J].农业工程学报,2012,28(14):36-41.
[15] 吕继东,赵德安,姬伟,等.采摘机器人振荡果实动态识别[J].农业机械学报,2012,43(5):173-196.
[16] 刘沛,陈军,张明颖.基于激光导航的果园拖拉机自动导航系统[J].农业工程学报,2011,27(3):305-308.
[17] 陈宁,周志峰.一种纯追踪模型改进算法[J].轻工机械,2014(4):69-72.
[18] 刘荣军,张长利,张晓雨.基于DM9000的S3C2410嵌入式系统的以太网接口设计[J].中国高新技术企业, 2010(7):150-152.
[19] 李逃昌,胡静涛,高雷.基于模糊自适应纯追踪模型的农业机械路径追踪方法[J].农业机械学报,2013, 44(1):205-210.
[20] 宁建,孙益田,刘青,等.智能化精准农业装备的发展趋势[J].机电产品开发与创新,2011,24(2):77-79.
[21] 李建平,林妙玲.自动导航技术在农业工程中的应用研究进展[J].农业工程学报,2006,22(9):69-73.
[22] 李军,马蓉.基于多传感器融合的拖拉机自动导航技术[J].农机化研究,2011,33(12):58-60.
[23] 吕安涛,宋正河,毛恩荣.拖拉机自动转向最优控制方法的研究[J].农业工程学报,2006(6):76-79.
[24] 周俊,姬长英,刘成良.农用轮式移动机器人视觉导航系统[J].农业机械学报,2005,36(3):91-94.
[25] 尹坤,陆英刚.国内外精细农业的应用与技术构成[J].黑龙江科技信息,2010(16):25-27.
[26] 王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
[27] 王俭,赵鹤鸣,陈卫东.基于子区域的机器人全覆盖路径规划的环境建模[J].苏州科技学院学报:工程技术版,2004,17(1):72-75.
