基于篮球比赛协作战术的多采摘机器人联合作业系统
2018-07-03董伯云
董伯云
(绍兴职业技术学院,浙江 绍兴 312000)
0 引言
随着人工智能的不断发展,机器人的研究中心已由个体作业转为联合作业。而篮球是一项将全体队员组织起来,采取相互配合发挥集体力量和注重团队整体协作的手段,争取打败对方的比赛。本文结合篮球协作战术与多机器人联系作业的特性与优势,将篮球比赛协作战术运用于多采摘机器人联合作业系统中,设计出了具有较高可靠性与稳定性的采摘机器人编队,对提高多机器人联合作业效率提供了一种新手段。
1 篮球比赛协作战术
篮球运动是1892年由美国史密斯博士发明的,迄今为止已达数百年,期间也经历了多次的创新和改革。目前,“桃子筐”已由最初的铁篮变为现在的篮网,篮球也从简单的一项室内游戏成为全球性的伟大体育赛事。从篮球的发展来看,其战术也经历了巨大发展,其包含传切、突分、策应和掩护等在内的数十种,战术创新决定了比赛是否能够顺利取得胜利。
篮球战术创新不仅有在前面基础上的发展创新,也有独立的完全创新,而现在的战术大多都是在前面优秀的基础上进行的再创。再创是指教练在一些经典战术的基础上,有针对性的对其加以结构、配合和速度的改变,使其适用范围更广。
1.1 篮球战术体系的认识与分类
在篮球比赛中,运用最多的战术是快攻、策应和阵地进攻等3种战术。战术类型的区别主要在于进攻配合、时间的连续性以及不可逆,即战术一般是严格遵循快攻→策应→阵地进攻等开展,不能出现逆序行为。篮球战术进攻顺序如图1所示。

图1 篮球战术进攻顺序
随着篮球的不断改革和发展,在比赛过程中,双方队员在半场甚至全场进行球权争夺大战,需要在整个球场不断使用各种战术,双方需考虑如何全面开展全场进攻。因此,只是简单地依靠图1的3种简单顺序战术进攻攻防,很难在实际比赛中取得优势。例如,当防守方运用推进收紧战术,进攻方首先应该采用快攻,然后采用推进攻到敌方三分球区,最后在敌方后场进行策应和阵地战术将球投进。策应是指在进攻端球员在对方全场防守或后场防守时,全队协作将球带入前场的配合战术所以在激烈的篮球比赛中,将球从后场带到前场,整个进攻应该加入推进战术,如图2所示。

图2 完善的进攻战术顺序图
当进攻方未能成功进球得分,且未能抢得前场篮板球,其身份马上转变为防守方,因此应该马上缩回后场三分线区进行防守,防止对方快攻得分。防下快攻后,应该快速采取落位、协防和配合战术形成防守局势,不给敌方采用策应得分的机会,形成防守快攻、协防和配合防守的防守机制。进攻转防守的战术顺序如图3所示。

图3 进攻转防守的战术顺序
1.2 篮球战术体系结构
根据篮球比赛的特性,篮球篮球战术体系包含进攻、争抢球和防守三大结构。其中,进攻包括快攻、推进、策应和阵地4种争抢球战术;争抢球包括跳球和争抢球两种争抢球战术;防守包括防守快攻、推进战术、协防和配合防守战等4种战术。在比赛中,进攻配合和球员个体战术行动是整个进攻体系的基础,防守配合和球员个体防守行动是整个防守体系的基础。篮球战术体系结构如图4所示。

图4 篮球战术体系结构图
2 多采摘机器人任务分配算法
2.1 多采摘机器人系统行为描述
采摘机器人系统行为描述的成员对象和方法包含以下几点:
1)多采摘机器人所在编队的集合M={m1,m2,…,mn},n表示机器人的数量。在实际作业中,采摘机器人一般以编队的形式进行操作,该编队一般包括多个机器人。
2)作业区域周边环境集合E={e1,e2,…,et},t为时间节点。
4)任务。多采摘机器人所有任务集合T={T1,T2,…,Tn}。
5)策略。机器人策略是指根据实际分配到任务,采取效率最大的方法进行作业操作。
6)目标。在多采摘机器人系统中,单个机器人都有自己的任务目标,合起来整个系统也有一个整体目标。
2.2 多采摘机器人任务分配算法
1)多采摘机器人任务能力描述。多采摘机器人集合为M={m1,m2,…,mn},则个体的能力Ci为
(1)
其中,αij为机器人mi的能力强弱。
假设任务具有多种类型,那么l个异构任务可以描述为
tk,1≤k≤l
(2)
对于任务tk,其对应的能力描述为
(3)
其中,βij为采摘机器人完成tk需要Cj的强弱。
在整个任务分配算法中,最重要的是机器人Mi能否根据当前作业流畅度、下一任务地点信息完成下一任务tk,则能力判断表达式为
αij≥βij, 1≤j≤n
(4)
为了方便机器人结合自身能力对该任务进行判断,可将式(4)改写为
(5)
对于机器人Mi和下一任务tk,如果存在
αij<βij
(6)
则说明机器人Mi不具备完成任务tk的能力,无法单独完成该项任务,则可以描述为
(7)
2)多采摘机器人任务分配算法的实现。假设机器人编队共包含4个采摘机器人,任务数目为10,考虑到机器人各自作业难度和区域的情况不一,则执行一段时间后应对机器人的能力进行重新配置,如表1所示。而机器人是否按照要求完成所有的任务,完成任务的时间也是个主要要求;同时,在作业过程中,应该充分考虑机器人行走路径总成,最大程度的减少成本。
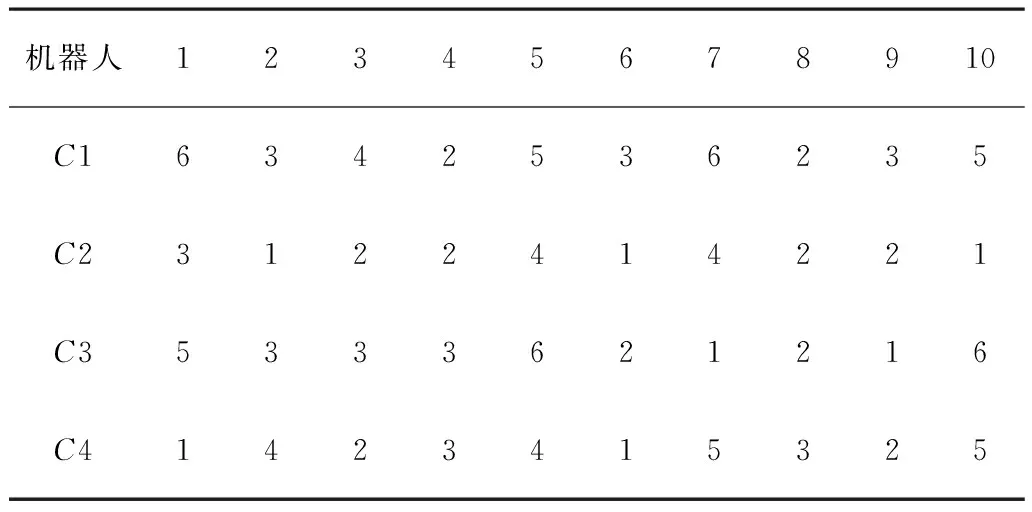
表1 采摘机器人能力配置值
在进行任务分配的过程中,将所有任务的回报值reb设置为最大值MAX,那么机器人完成任务tk的代价为cons(ri1|tk)的方法有两种:①F1:cons(ri1|tk)=dik;②F2:cons(ri1|tk)=dα*(ktask+kt)。
其中,dik为机器人从当前位置到达指定任务tk需要的路程;dα为完成当前任务和指定任务总共需要行走的路程;ktask和kt为权重系数,可以根据实际情况进行调整。
得到能力配置初始值及任务代价cons的方法后,便可以对任务实施分配,分配流程共有以下5步:
1)观察作业区域环境状态,即当前机器人所处位置信息与任务完成情况,提取与任务相关的状态;
2)计算任务代价cons,并选择一个能力配置值最高的任务tk;
3)执行任务tk;
4)更新新的能力配置值;
5)重复1)~4),直至完成所有任务。
3 多采摘机器人联合作业
3.1 多采摘机器人协作模式
多采摘机器人协作模式主要是对机器人之间的合作方式进行规划,包括集中规划、分散规划和分散集中3种模式。
1)集中规划模式:系统带有一个具有全局规划的后台运行程序,使用该系统可以进行作业任务的全局控制,实现多机器人之间的任务分配和路径规划,而机器人只需根据指令执行作业。
2)分散规划模式:没有集中规划的后台,而是每个采摘机器人根据自身情况指定采摘任务,即所有控制分散处理,大大提高了机器人作业的灵活性。
3)分散集中规划模式:该模式首先由采摘机器人个体规划自己的任务和行走路径,并将规划提交给后台主控制系统,协调者根据各机器人的规划进行适当调整。
分散集中规划模式具有复杂度低和效率高的特点,适用与具有一定组织结构和协作能力较高的群体,因此本文采用该模式开展协作作业。
3.2 搭建多采摘机器人联合作业模型
本文利用分散集中规划的优势,并将该模式运用与多采摘机器人联合作业系统中,并设计和建立了多采摘机器人联合作业的体系和模型。多采摘机器人联合作业体系和模型分别如图5和图6所示。
如图5所示:系统联合作业体系结构主要包括通讯、信息融合、感知、规划和命令发出5个层次。其中,通讯层负责各采摘机器人与后台总控制器的信息交互;信息融合层负责解析所有信息,并将解析的数据放入信息库;感知层负责获取各机器人周边环境信息;规划层负责整合各机器人提交的任务规划,并进行适当修改;命令发出层负责根据给4个机器人发出指令,让机器人根据环境情况修正作业。
如图6所示:多机器人联合作业模型执行任务顺序是发布协作任务→建立任务分配算法→机器人自主分配任务→判断是否达到协作要求→执行并完成任务等,这一协作流程符合采摘机器人在时间、地点不确定的田间进行作业的要求。

图5 多采摘机器人联合作业体系结构
4 实验结果与分析
为了验证该多采摘机器人联合作业的能力与效率,本文利用QT 5.7对该系统设计了仿真平台。仿真平台采用第3章中所述任务分配算法,多采摘机器人协作采用分散集中模式。在仿真过程中,采摘机器人编队包含4个机器人,待采摘作业的区域共有27块,如图7所示。
经过各机器人自主分配任务后,总控制台对其进行了微调:机器人M1从第1号区域开始作业,机器人M2从第5号区域开始作业,机器人M3从第16号区域开始作业,机器人M4从第25号区域开始作业,其中作业区域及路径规划为
M1:1→2→4→3→8→9→10
M2:5→11→21→12→6→7→13
M3:16→20→19→15→14→18→17
M4:25→27→26→24→23→22
根据以上规划,各机器人在最短的时间内完成了联合作业要求,在作业过程中,各机器人行驶路径最短,效率最高。因此,将篮球比赛协作战术的任务分配算法与分散集中的控制模式相结合的方法,使得多采摘机器人联合作业达到了比较好的结果,具有一定的实际应用价值。

图7 仿真测试结果
5 结论
针对采摘机器人编队在作业过程中任务分配困难及执行效率较低的问题,将篮球比赛协作战术的任务分配算法与分散集中的控制模式相结合,运用于多采摘机器人联合作业系统中,并利用QT 5.7进行了仿真实验。实验结果表明:各机器人在最短的时间内完成了联合作业要求,在作业过程中,各机器人行驶路径最短,效率最高。
参考文献:
[1] 高伟,曹昕燕,张万里,等.基于OFDM-MIMO移动通信模型的采摘机器人设计[J].农机化研究,2017,39(4):129-133.
[2] 唐惠康,郑宝林.基于SingalR和Web的采摘机器人远程编队控制研究[J].农机化研究,2017,39(3): 237-241.
[3] 葛斯楠.基于改进蚁群算法的多机器人任务分配[D].沈阳:沈阳工业大学,2016.
[4] 王友发.面向智能制造的多机器人系统任务分配研究[D].南京:南京大学,2016.
[5] 王维.基于多智能体系统的多机器人路径规划方法研究及应用[D].成都:电子科技大学,2015.
[6] 贺橙林.基于机器视觉的气动采摘机器人研究[D].上海:上海交通大学,2015.
[7] 昝杰.多自主移动机器人协作的关键技术研究[D].西安:长安大学,2014.
[8] 王彤.现代篮球比赛中运用抢攻战术的观察与分析[D].郑州:河南大学,2013.
[9] 黎萍,杨宜民.基于博弈论的多机器人系统任务分配算法[J].计算机应用研究,2013(2):392-395.
[10] 周舟,王俊.采摘机器人机械臂的控制与联合仿真[J].电子技术,2013(1):60-62,38.
[11] 吴笑萍.一类多机器人系统任务分配方法的研究[D].南京:南京理工大学,2012.
[12] 邵杰,杨静宇,万鸣华,等.基于学习分类器的多机器人路径规划收敛性研究[J].计算机研究与发展,2010(5):948-955.
[13] 胡文.基于MAS的多机器人系统及关键技术研究[D].成都:西华大学,2010.
[14] 齐心跃,田彦涛,杨茂,等.基于市场机制的多机器人救火任务分配策略[J].吉林大学学报:信息科学版,2009(5):506-513.
[15] 龚静,薛德黔,孙增圻.一种多机器人分布式分级协作策略[J].通信技术,2009(9):124-126.
[16] 蒋焕煜,彭永石,应义斌.双目立体视觉技术在果蔬采摘机器人中的应用[J].江苏大学学报:自然科学版,2008(5):377-380.
[17] 张嵛,刘淑华.多机器人任务分配的研究与进展[J].智能系统学报,2008(2):115-120.
[18] 姜健,闫继宏,臧希喆,等.基于信息素的多机器人协作任务分配[J].计算机工程与应用,2008(2):20-22.
[19] 秦季冬.基于博弈论的多机器人运动协调[D].南京:南京理工大学,2007.
[20] 高云园.基于生物免疫机理的多机器人协作研究[D].杭州:浙江大学,2007.
[21] 柳林.多机器人系统任务分配及编队控制研究[D].长沙:国防科学技术大学,2006.
[22] 柳林,季秀才,郑志强.基于市场法及能力分类的多机器人任务分配方法[J].机器人,2006(3):337-343.
[23] 李俊华.多机器人的协调合作技术与群组控制策略研究[D].西安:西安电子科技大学,2006.
[24] 张勇.现代篮球战术体系的系统研究[D].北京:北京体育大学,2005.
[25] 汤静,王晨宇.论篮球比赛中战术行动的反射控制[J].吉林体育学院学报,2003(1):57-59.
[26] 冯子安.试论当今篮球比赛中战术运用的特点与要求[J].湖北体育科技,2001(3):25-26,28.
