振动筛运行状态观测器的研究与设计
2018-07-02杨硕
杨 硕
(1.煤炭科学研究总院唐山研究院,河北省唐山市,063012;2.天津大学电气自动化与信息工程学院,天津市南开区,300072)
选煤厂是典型的设备密集型工业场所,作为流程化的生产体系,运行过程具有负荷高和周期长等特点,因此,煤炭洗选过程的安全性与设备性能的可靠性密切相关。振动筛作为实现产品分级和固液分离的筛分机械,是选煤厂主要的工艺设备。近年来,为了提高筛分效率和产量,设备的尺寸和工作强度不断提高。我国大多数煤炭生产企业对振动筛的检测流程仍停留在传统的人工巡检阶段,现场受到检修空间狭窄、光照条件阴暗、瓦斯浓度高等恶劣工况条件的限制,导致人工检测强度高、速度慢、效果差,存在不易察觉的设备细小故障,安全隐患较高。目前,采用多传感器融合技术的数据诊断方法,逐步应用在对大型振动筛单一部位的在线分析和离线仿真过程中,但是由于受到振动筛的振动频率较高、传感器通用性较差和受工况电磁干扰的影响,严重制约了传感器的测量精度和使用寿命,并且由于定位限制无法对振动筛进行全方位检测。
基于振动筛局部运动规律性和筛体振动一致性的特点,为了对振动筛运动轨迹所产生的细微变化进行实时性和循环性的全方位检测,提高检测的精度和速度,及时发现设备可能存在的安全隐患,以便迅速有效地采取相关措施,本文提出了一种不受振动筛的机械结构和振动强度影响的基于双目视觉技术的无人自动检测装置——振动筛运行状态观测器,该观测器是具有主动运行和定点观测功能的轨道式行走装置,能够实现对振动筛运行状态的非接触式检测,能够代替操作人员在自动化工业生产中进行各种繁复的巡检劳动。
1 振动筛运行状态观测器的设计
振动筛运行状态观测器由双目视觉系统、驱动系统、定位系统、通信系统和电源管理系统组成。振动筛运行状态观测器整体结构示意图如图1所示。
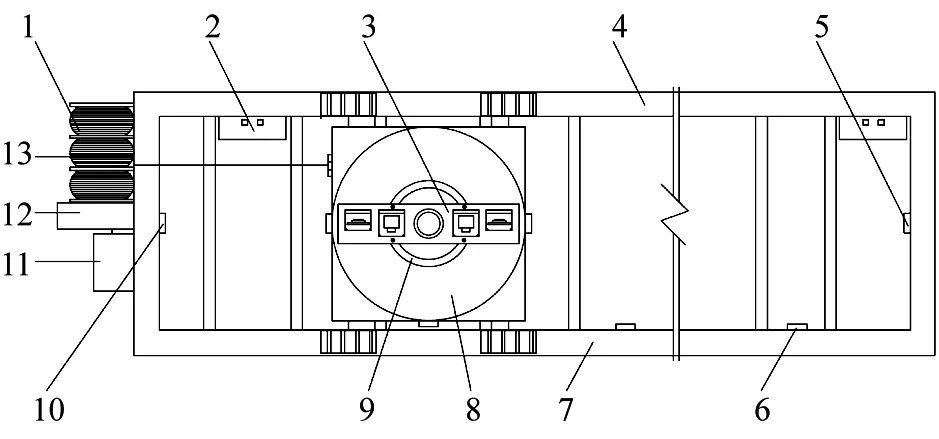
1-通信系统;2-充电座;3-视觉系统;4-定位系统;5-终点磁体;6-中途观测点磁体;7-轨道;8-行走单元;9-旋转单元;10-起点磁体;11-直流减速电机;12-传动机构;13-线缆轴 图1 振动筛运行状态观测器整体结构示意图
1.1 双目视觉系统
双目视觉系统由图像采集单元和图像分析单元组成,常用图像处理器以DSP和工业PC为主。为了保证观测器的检测精度和处理时效,需要在最低功耗模式下和单位时间内完成对大量图像数据的采集与分析工作,因而采用基于工业PC的双目视觉系统。设计中采用透明护罩为观测器内部元件提供保护,避免恶劣工况条件影响观测器的工作性能。基于工业PC的双目视觉系统示意图如图2所示。
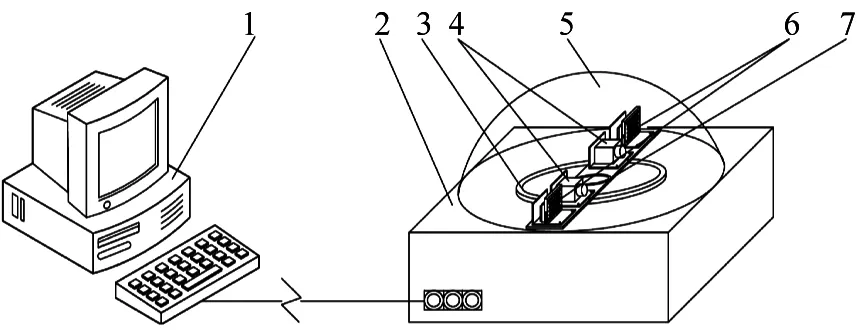
1-工业PC;2-行走底座;3-中空传动平台;4-高速相机;5-透明护罩;6-补光源;7-矩形中空工作台图2 基于工业PC的双目视觉系统示意图
1.1.1 图像采集单元
图像采集单元由高速相机和补光源组成,固定于矩形中空工作台上,根据观测器运行状态,通过底座进行水平或垂直方向的调整。设计中为了精确追踪检测对象的运动特性并还原运动轨迹,需要采集特征点在一个运动周期内的多帧图像,综合考虑图像处理算法的精度和时效性,应用帧率为116 fps、像素为808×608的高速相机作为图像采集装置,相机采用CMOS传感器,采用POE方式供电,焦距为9 mm,通过Gigabit Ethernet接口传输图像数据,数据与电源由一条双绞线电缆同时传输。为了保证图像质量不受自然光照影响,开发智能补光方案,光源可按实际补光需要多角度旋转,在低照度环境下,观测器开启补光源进行补光,增强图像亮度;在强光照度环境下,观测器自动调整成像模式,抑制强光影响,保证图像清晰度,设计中补光源光强均匀有效分布,达到整体高亮效果,有效减少光污染,对振动筛检测部位进行补光。
1.1.2 图像分析单元
图像分析单元由基于工业PC的图像处理算法完成,工作机理包括相机标定与关联、角点检测、立体匹配、图像预处理、轨迹追踪和模式识别。双目视觉系统的定位精度依赖于双目相机本身的标定精度,设计中应用张正友标定法,由已知的特征点图像坐标[uv]T和空间点坐标[XwYwZw]T等线性参数,通过采集一个靶标位姿上的8个特征点,在不考虑畸变因素情况下求取单应矩阵见式(1):
(1)
式中:Zc——深度系数;
Mi——投影矩阵;
Hi——单应矩阵;
λ——常数因子;
Mi1——相机内参数;
ri——旋转矩阵;
t——平移矩阵。
建立的内参数方程组见式(2):
(2)
通过采集6个靶标位姿,依据旋转矩阵正交性求取相机内参数。利用Levenberg-Marquardt算法,通过已有相机参数求解相机的非线性畸变参数。为了提高系统精度,进行非线性畸变参数与线性参数间的重复计算,直到参数值收敛为止。通过OpenCV求取基础矩阵,依据极线几何原理建立双目坐标系内两个对应点在图像坐标系内的对应关系,完成坐标关联,实现基于特征匹配算法的立体匹配。
观测器的图像分析精度和效率取决于被处理图像的质量,为了得到更适合后续分析振动筛运行状态的图像数据,对采集的原始图像进行灰度化、直方图均衡化、平滑滤波和图像增强等预处理工作。应用阈值筛选法和基于尺度空间理论的多尺度Harris角点检测算子提取图像特征点。采用改进型Lucas-Kanade光流估计算法完成对高速移动特征点的追踪。设计BP网络分类器,建立并训练局部特征点运动轨迹与设备运行模式的映射模型,实现对振动筛运行状态的识别和分类。双目视觉工作机理如图3所示。

图3 双目视觉工作机理
1.2 驱动系统
驱动系统是观测器的动力执行单元,负责完成装置的主动运动,由行走单元和旋转单元组成。观测器完成对振动筛各局部特征点运动轨迹的追踪与辨识后,在控制器指令作用下,通过驱动系统对振动筛的运行状态进行周期性循环检测。驱动系统结构图如图4所示。
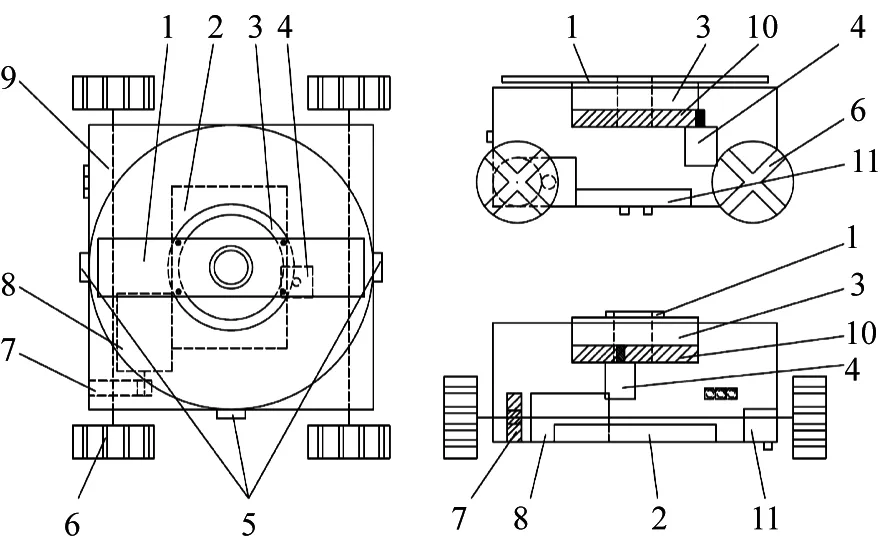
1-矩形中空工作台;2-控制电路;3-中空传动平台;4-双向步进电机;5-干簧管传感器;6-驱动车轮;7-齿轮传动机构;8-双向直流电机;9-行走底座;10-斜齿齿轮盘减速机构;11-工作电源图4 驱动系统结构图
1.2.1 行走单元设计
行走单元为四轮双轴底盘式结构,驱动车轮的传动轴通过齿轮传动机构由双向直流电机驱动,双向直流电机通过H桥驱动电路,在控制器指令下完成动作。通过改变对角线上不同三极管的导通情况,改变电流流经电机时的方向,从而控制电机的转向。驱动电机时,为了防止H桥两个同侧的三极管同时导通,应用与门和非门改进电路,4个与门和运行使能信号相接,控制电机运转;2个非门与电机正转使能信号和反转使能信号相连,在保证H桥同侧只有1个三极管导通的情况下,自动完成电机正反向动作。在设计中,为了节约观测器控制电路的空间和降低整机功耗,采用L298N芯片代替分立元件。为了保证观测器运行平稳,驱动车轮具有宽体和多纹路的特性。行走单元电机控制原理如图5所示。
1.2.2 旋转单元设计
旋转单元是置于行走底座内的中空旋转平台,由双向步进电机、斜齿轮盘减速机构和中空传动平台组成,在平台上固定矩形中空工作台与视觉系统相连,中空旋转平台通过双向步进电机在控制器指令作用下,完成由初始位置沿顺时针和逆时针双向往返180°的旋转定位工作。行走底座、传动平台和工作台均采用中空结构,可方便工业相机和光源的布线,避免平台转动时线缆缠绕。旋转单元结构设计如图6所示。
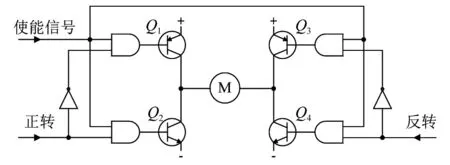
图5 行走单元电机控制原理

1-高速相机;2-补光源;3-双向步进电机;4-斜齿齿轮盘减速机构;5-中空传动平台;6-矩形中空工作台图6 旋转单元结构设计
1.3 定位系统
观测器的定位系统由轨道、磁体和干簧管传感器组成,负责完成对振动筛各个关键部位的定点检测功能。轨道采用双侧槽的设计方案,根据振动筛的现场安装方式和检测需要,可采用悬挂吊装、水平安装和垂直壁装等方法固定于建筑主体之上。轨道形状针对振动筛的机械结构,设计为直线型、曲边L型、曲边U型和曲边矩形。按照振动筛检测指标的要求,在轨道边缘定位并安装起点磁体、若干中途观测点磁体和终点磁体。为了保证观测器平稳运行,轨道采用内嵌式螺栓进行固定。干簧管传感器分别安装在观测器的前端、侧端和末端,通过与轨道起点、中途观测点和终点磁体接触,由控制器发出行走电机正转、中途观测和反转信号指令。
在控制器指令下,观测器通过行走与定位系统完成主动运动与定点观测功能。首先观测器初始上电,通过检测电机正转使能信号,判断观测器工作起始点是否为轨道起点,若为起点,则观测器通过定时器计时,在电机正转、反转和中途观测信号的指令下完成观测器的周期性循环运转,完成对图像数据的采集与振动筛运行状态的分析;如果初始检测观测器的工作起始点为轨道中途点或终点,则电机停止,设置电机状态为反向,将观测器运行至起点,完成前期准备后继续工作。观测器主动巡视工作流程如图7所示。
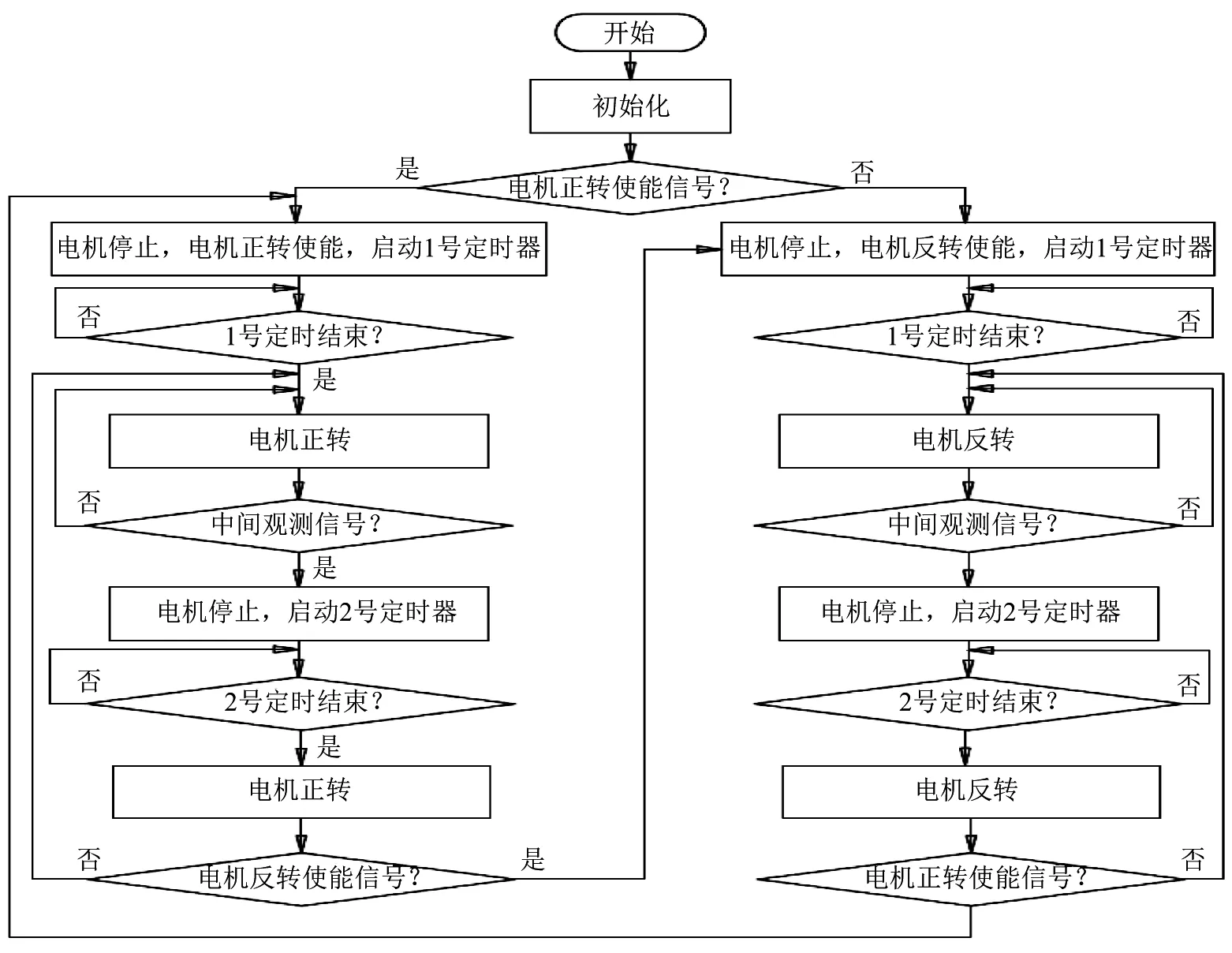
图7 观测器主动巡视工作流程
1.4 通信系统
由于振动筛的振动频率较高,为了精确追踪并还原局部特征点的运动轨迹,需要以大量图像数据为基础,因此采用有线通信方式来保证数据的质量与完整性。通信系统通过线缆轴控制单元实现,由直流减速电机、传动机构和线缆轴组成。为了减轻观测器自身的重量负荷,安装在轨道起点,直流减速电机采用外部稳压电源供电,不计入观测器内部功耗,通过控制线与控制单元相连,装置工作前对电机进行转速标定,从而达到线缆收放速度与观测器行走速度一致,通过控制器的指令实现行走电机与直流减速电机的同步工作。
1.5 电源管理系统
图像质量是保证检测精度的关键,为了防止供电浮动对观测器工作性能的影响、提高供电的可靠性以及减轻线缆轴机构的工作压力,设计采用电池供电模式,应用大容量锂电池作为工作电源,为观测器内部的视觉系统、驱动系统和控制器提供稳定电源。在轨道的起点和终点分别安装充电座,通过电极对循环运行的观测器自动充电。当电源发出亏电信号时,线缆轴单元将持续工作,并将观测器拖回轨道起点为电池充电。
2 振动筛运行状态观测器测试
以天地(唐山)矿业科技有限公司选煤装备产业制造基地的再调振动筛为测试对象,以检验其各系统性能和对振动筛运行状态的检测精度是否达标。测试中,轨道形状设计为曲边U型,采用悬挂吊装方式与建筑主体相连,将观测器置于轨道上,沿轨道边缘分别设置起点、终点和8个中途观测点磁体,用来定位观测器的检测位置。
2.1 双目视觉系统测试
为了检测厂房中自然光照变化对观测器检测精度的影响,实验分别选取一天的早、中、晚3个时段进行测试。振动筛局部特征点检测数量见表1。
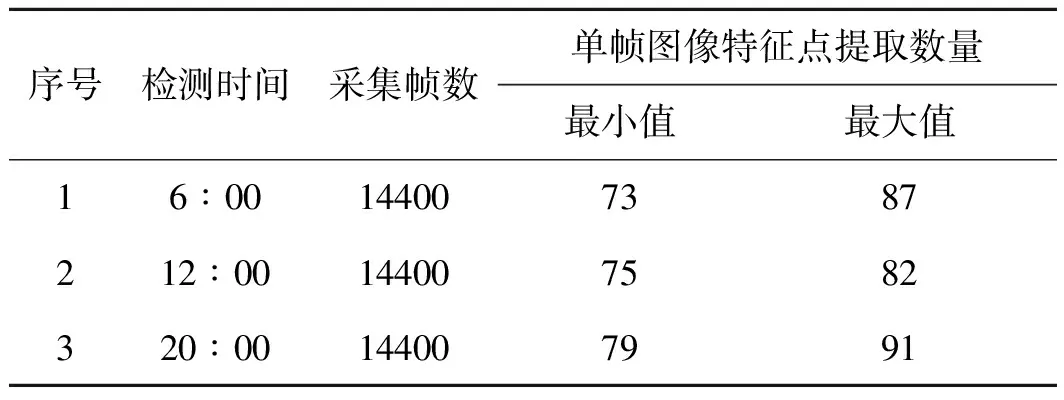
表1 振动筛局部特征点检测数量
由表1可以看出,在不同自然光照条件下,观测器对筛体同一位置的检测过程中,捕捉到的特征点数量在同一数值邻域内,因此智能补光方案可有效改善图像质量, “有线通信”方式保证了图像数据的完整性与时效性,通过双目视觉系统中的图像预处理和角点检测算法能够提高对运动特征点提取的健壮性和稳定性。
通过人为调整振动筛运行状态,设定BP网络分类器特征点的运动状态,00表示停止、01表示正常、10表示疑似、11表示故障,双目视觉系统在局部特征点的单个运动周期(1/24 s)内可完成约5帧图像的采集,通过图像分析法和BP网络分类器,按照试验设定的百分数下限判据指标要求进行数据分析,观测器可准确检测振动筛的运行状态,实现对特征点的振动轨迹的追踪和识别。 振动筛运行状态百分数下限分析见表2。

表2 振动筛运行状态百分数下限判据分析
2.2 驱动与定位系统测试
在观测器的控制器指令和工业PC的即时指令共同控制下,设置中途观测时间为5 min,令观测器进行往复循环运动3个运动周期以上,针对观测器不同的运行起点进行测试。上电后,观测器能主动识别工作起点位置并开始运转,在运行过程中,驱动系统的机械结构运动流畅无扭曲和噪音,经过轨道曲边过程中无明显卡顿现象;在定位系统的中途观测信号发生阶段,无明显滑行和滞后现象;在观测器整体控制过程中无逻辑混乱出现。
2.3 通信和电源管理系统测试
设置轨道起点和终点的观测时间为30 min。测试中,线缆轴控制单元的线缆收放整齐有序,无凌乱交叉;由速度计量测得线缆收放速度和观测器运行速度一致,线缆收放对观测器无拉力作用;观测器工作电源在自动充电模式下未出现亏电情况,续航时间可满足一个生产周期的检测需求;通过人为设定制造电源亏电信号,观测器可按设计要求,由线缆轴单元将观测器回拖至轨道起点,并进行充电作业。
3 结语
本文提出的基于双目视觉系统的振动筛运行状态观测器,用于对振动筛等高频振动机械的整体运行状态进行检测。实验测试表明,观测器可不受外界光照影响,通过图像分析方法对振动筛局部特征点的运动轨迹进行追踪和辨识,具有较高的准确性和时效性;观测器作为检测过程的基础数据来源,通过驱动、定位、通信和电源系统,在控制器程序指令和工业PC即时指令下,实现了高质量的自主巡视功能。与现有检测方法相比,观测器既可以通过逐帧对图像数据进行处理,并对特征点运动轨迹的细节变化进行定性判断,又可以通过百分数下限判据指标进行运行状态的定量分析,所以可代替人工在嘈杂的工矿环境中进行检查。但在装置运行过程中,通信线缆的长度受到严格限制,在强电磁干扰条件下,开发并应用能够确保图像数据传输质量的高品质无线通信技术成为接下来的研究方向。
参考文献:
[1] 郭牛喜,陶能进,李明辉.我国特大型现代化选煤厂设计的实践与展望[J].煤炭工程,2012(S1)
[2] 丁开旭.大型直线振动筛制造工艺研究与探讨[J].煤炭技术,2016(7)
[3] 李建华.选煤厂设备巡检系统设计[J].工矿自动化,2012(6)
[4] 沈功田,李建,武新军.承压设备脉冲涡流检测技术研究及应用[J].机械工程学报,2017(4)
[5] 沈功田,胡斌.大型承压设备不停机电磁无损检测技术及应用[J].中国特种设备安全,2016(1)
[6] 陈志新.脉冲噪声环境中基于FLOWVD的机械设备故障时频监测方法[J].振动与冲击,2013(10)
[7] 于洋,杨金英.机械振动检测仪器的研制[J].仪表技术与传感器,2008(9)
[8] 齐子元,米东,徐章隧等.奇异谱分析在机械设备故障诊断中的应用[J].噪声与振动控制,2008(1)
[9] 安连锁,沈国清,郭金鹏等.声学技术在电厂设备状态监测中的应用研究[J].中国电力,2007(1)
[10] 程亮,黄敬兰,孙刚.博后筛的结构特点及其应用[J].中国煤炭,2005(3)
[11] Hajar Sadeghi, Payman Moallem, S. Amirhassn Monadjemi. Feature Based Dense Stereo Matching Using Dynamic Programming and Color[J]. International Journal of Computational Intelligence, 2007(3)
[12] T Lindeberg. Scale-Space Theory in Computer Vision[M]. Berlin Heidel-berg: Springer, 1994
[13] 肖军,朱世鹏,黄杭等.基于光流法的运动目标检测与跟踪算法[J].东北大学学报(自然科学版),2016(6)
