基于运动目标检测的哨位夜间自动报警系统
2018-06-30哈达
哈达
智能视频监控技术[1]作为智能化自动控制领域一个前沿的研究方向,已经成为国内外学者热点讨论和研究的话题之一.近年来智能视频监控技术作为公共安全领域的核心技术之一,越来越受到学者们的关注和重视.尤其是在一些敏感场所,如广场、银行、监狱、哨所等危险事故易发地点.目前大部分的视频监控系统仍然依靠工作人员被动地监视监控区域,任务繁重,耗费了大量人力财力,而智能监控系统很好地解决了这些问题,而且准确性高.由于智能监控系统的这些优点,它已经成为社会发展的迫切需要,是计算机视觉领域的主要研究课题之一,对国家公共安全的健康发展具有重要意义.
通常白天的视野相对比较开阔,对监控技术的要求比较低,监控主要用于重要路段或建筑内事件的记录;而在夜间,视野条件差,光靠人力肉眼观察很难了解具体情况,容易遗漏重要信息或判断失误,造成不可预知的后果.
针对武警部队任务重、哨位多、目标难把控的现状,尤其是夜间犯人逃跑以及首长驻地警卫等情况,光靠哨兵肉眼观察及值班员监控观察,很难及时发现情况,延误最佳处置时间,造成严重后果.本设计将目标检测、目标跟踪、模式识别技术等应用到对运动目标异常行为自动识别的研究工作中,不仅具有很高的研究价值,也有很大的应用场景与发展潜力.
1 运动目标检测
PBAS算法是一种非参数的背景模型,对各个像素点xi由邻近当前视频帧的一系列历史像素值进行建模[2].PBAS算法的结构框图如图1所示,作为算法的核心部分,判别为背景或是前景取决于当前输入视频帧I(xi)和相应的背景模型B(xi),这个决策过程是由每个像素点的决策阈值R(xi)决定.同时,背景模型必须能够随着时间的推移进行不断更新以适应潜在的背景变化,PBAS算法中背景模型的更新依赖于每个像素点的学习参数T(xi).
传统的运动目标检测方法容易受动态背景(如喷泉、大幅度摇晃的树叶、行进间的汽车等)干扰.针对现有PBAS目标检测算法在动态背景下存在着误检率高、检测精度较低的问题,本文设计了一种将改进后的自适应决策阈值更新策略与优化处理方法相结合的目标检测算法.该算法首先使用改进后的自适应前景判断阈值对目标进行检测,然后对检测的结果使用前景点生命周期机制、形态学处理等方法进行优化处理.
本文改进的PBAS目标检测算法的流程图如图2所示.
2 人体目标识别
2.1 HOG算法原理
Triggs在2005年提出了HOG特征描述算子,由于人体目标的非刚性,加上衣服颜色及纹理的多变性,使得很难用这些特征去表征一个人.而HOG算法则是利用梯度或边缘的方向密度分布能很精确地表征局部目标的表象和现状这一特点,来满足目标识别的需要.它每次提取的是目标(人)的边缘梯度特征[3].
HOG特征提取一般包含了以下5个步骤:
1)Gamma和颜色空间标准化.因为光照强弱的多变性,它会对图像局部边缘特征造成一些影响,所以Dalal等引入图像Gamma和颜色空间标准化作为HOG特征提取的预处理手段.
2)梯度的计算.梯度也就是图像函数的一阶导数,通常是一个矢量.
3)单元内各个梯度方向上的梯度值投票统计.空间表示的就是不同的特征向量采集Cell.
4)对比度归一化.就是将各个独立的单元,转化为一些有部分重叠的块空间.这样做不但使得所有的梯度直方图转化为一个向量,能大大减弱图像局部变化对整体的影响,而且块之间的重叠相关性大大地提高了特征的利用率.
5)特征向量生成.
2.2 基于HOG改进的目标识别算法
针对HOG特征本身不具有尺度不变性这一弊端,本文分析固定成像器材的成像景深与人体目标的尺度不变性之间的关系,利用Sobel梯度算子[4]计算并分析INRIA人体检测图片数据库中正样本图片,得到人体边缘信息分布的先验性感兴趣区域,并通过设定相对应的感兴趣区域矩形块导出了一种基于先验性ROI约束的HOG特征提取算法.
如果处理的图像为三通道的图像,我们对每个通道进行独立处理.在每个通道中除了像素值,还用到了梯度值,即输入视频帧I(xi)={Iv(xi),Im(xi)},其中Iv(xi)和Im(xi)分别代表每个像素点的像素值和梯度值.相应地,距离计算的公式则变为:
其中,为上一帧的平均梯度值,表征了梯度信息相对于颜色信息的重要程度.
式(1)中梯度信息对于整个特征的贡献并不是十分明显,且三通道的计算增加了算法的复杂度,因此本文采用单通道的局部二值模式(LBP)特征对原始梯度信息进行替换,以降低算法的复杂度.
3 单目摄像头测距
3.1 单目摄像头三维测距模型
单目摄像头测距[5]是利用单个位置相对固定的摄像头按照单目摄像头测距模型将目标在图像空间物理坐标系中的位置转换到在真实空间世界坐标系中的实际位置的计算方法,它是计算目标在图像空间中量化的相对速度的前提[6].常用的单目摄像头测距原理以二维测距模型居多,在此基础上实现了单目摄像头三维测距模型,并且延伸到对空间中目标的高度的测量,该模型在视频监控中具有较强的性能和较好的应用潜力[7].
3.2 单目摄像头测距原理及方法
测距原理及详细步骤如下.
1)通过单目摄像头标定获取摄像头的焦距,这里首先利用待测摄像头对8∗8的黑白棋盘格标定板采集20帧空间位置不同的图像,然后用摄像机标定程序对摄像机进行标定,并且采用多次测量求取平均值的方法得到较为精确的摄像头内部参数[8].得到的焦距f的单位是单位距离上的像素点的个数,与CCD板上的成像的尺寸成比例[9].
2)对单目摄像头测距模型建模,设定模型计算需要的先验条件,这里假设已知3个数值:摄像机的镜头光轴与水平地面的夹角α,摄像机镜头与水平地面的相对高度H和摄像机的焦距f[10].
对单目摄像头三维测距模型进行二维分解,如图3所示.
4 应用模块设计与实现
通过建立哨位夜间自动报警系统,来提醒哨兵有人员接近,该系统主要实现夜间锁定、动态识别、距离判断、自动报警4个方面[11].系统通过对黑夜图像识别,判断是否为运动物体,再判断目标种类,如果是人员,当其接近到一定范围,则提醒哨兵有人接近[12].该系统可以在夜间有效地监控哨位周围环境,提高哨兵对敌情的感知能力,弥补哨兵人力识别的不足,有效地降低安全隐患[13].
4.1 运行界面及平台
本设计基于Windows7系统直接运行,打开设置好的.exe文件,即可得到如图4所示命令框.
输入视频名称,回车运行,即可得到如图5所示命令框.
其中图6所示win1界面显示源视频,图7所示enhance界面显示增强图像,图8所示result界面显示检测结果.
4.2 夜间人体目标闯入检测
当警戒区域内没有运动目标出现时,程序处于运行状态,但不报警,实验结果如图9所示.
当警戒区域内有运动目标出现时,利用基于HOG改进后的PBAS目标检测算法对其进行判断.
如果目标检测结果不是“人”,那么不报警,实验结果如图10所示.
如果目标检测结果是“人”,那么报警,实验结果如图11所示.
4.3 目标闯入检测的扩展应用
在许多敏感的监控场所,如军事重地、边防哨所和政府大楼等区域是严禁非法人员闯入的,因此,需要对预先设定的警戒区域实时监控,一旦出现非法目标靠近并意图闯入,立刻发出报警信号.根据实际监控场景中闯入目标的运动速度、尺寸等运动参考量给出综合的报警级别.
4.3.1 运动速度检测
采用Lucas-Kanade光流法进行运动速度的计算[14].光流法的基本思想是:模拟物理的运动场,根据视频帧中像素点的位置变化为其构建一个速度矢量,从而形成整个图像的一个“运动场”,则这个“运动场”即为像素点的运动轨迹图,从而可以清晰明了地获得像素点的运动信息.假设在t时刻像素点的灰度值为E(x,y,t),(x,y)为坐标值,设在t+dt时刻,该像素点运动到(x+dx,y+dy),像素值为E(x+dx,y+dy,t+dt),由于假定像素点的瞬时灰度值是不变的,因此有:
对上式右边按照泰勒展开,当dt→0时有:
其中:
仅对检测到的前景运动目标区域进行光流的计算,定义当前运动目标区域内的像素总数为Nf,则在t时刻该运动目标的平均速度为:
为减小噪声干扰,对式(9)计算得到的速度进行相邻三帧的均值滤波,即:
4.3.2 目标尺寸检测
当多个目标闯入警戒区域时,无论目标的运动状态如何,都应作出高级别的报警.由于相近的前景目标容易被误检为一个目标,因此,采用检测到的前景目标的个数Count和前景目标的面积Area作为目标尺寸的衡量标准:
其中,width和height为前景目标外接矩形的宽和高.
采取基于目标运动速度、尺寸等运动参考量对其闯入行为进行分级预警,首先对输入的视频帧进行图像的预处理[15],利用改进的PBAS目标检测算法提取运动目标,然后判断运动目标是否闯入预先设定的敏感区域,若发生闯入,检测前景目标是否为多目标,若为多目标则直接设为高级别报警;若为单目标闯入,则计算目标的运动速度,若为高速运动,设为高级别报警,否则设为低级别报警.具体流程图如图12所示.
由图13和图14可以看出,当自行车闯入指定区域时,有HOG特征反馈的结果为非人,因此,不予以报警;而当闯入的目标变成人的时候,系统报警,并由人员的个数与速度给出报警等级.
5 结果分析
本文利用误检率、漏检率和正检率对目标闯入检测算法进行定量分析,定义误检率为错误检测闯入行为数目与所有检测闯入行为数目之比,漏检率为未检测到的闯入行为数目与所有检测闯入行为数目之比,正检率为正确检测闯入行为数目与所有检测闯入行为数目之比.利用自行拍摄的测试视频库中的50段视频对基于运动参考量的目标闯入算法进行测试,并将结果换算成比率填入表格.表1为本文目标闯入检测算法的统计结果.
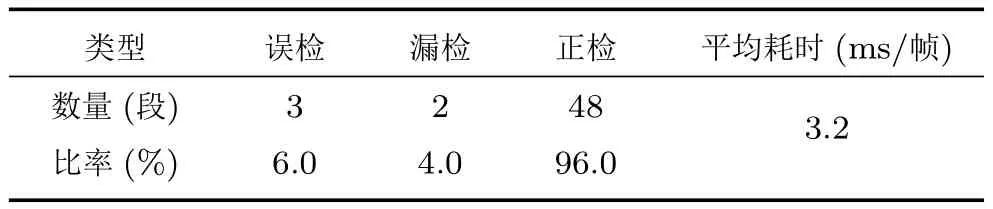
表1 目标闯入检测统计结果
由表1可得,改进后的正检率高达96%,而误检率和漏检率都不到10%,从实验结果来看,本设计能够满足哨位夜间自动报警的各种功能,且有着良好的准确性和鲁棒性,能够作为实际情况处置的有效依据.
6 结论
本文主要对智能监控系统中比较关键的技术—运动目标检测技术进行了研究,重点研究了基于PBAS的目标检测算法,提出的方法使检测距离度量更加精准,在结合目标检测和目标跟踪技术的基础上,对夜间敏感区域目标的闯入这一应用进行了探索.但是,目前大部分目标检测技术都是基于固定摄像机的,也即监控场景是固定的,当处在动态场景中,如车载摄像机、航拍等特定应用,大部分目标检测算法将会失效,因此,下一步有必要研究在动态场景下鲁棒的目标检测技术.
1 郑世宝.智能视频监控技术与应用[J].安防科技,2015,33(1):94−96.
2 卢岩.交通监控中的运动人体目标检测与跟踪[D].长春:中国科学院研究生院(长春光学精密机械与物理研究所),2016.
3 YANG X Y,YANG Y,YANG S C,et al.A novel motion object detection method based on improved frame dif f erence and improved Gaussian mixture model[C]//International Conference on Measurement,Information and Control(ICMIC),2015:309−313.
4 沈德海,张龙昌,鄂旭.一种基于Sobel算子梯度增强的边缘检测算法[J].电子设计工程,2015(10):162−165.
5 张长隆,杨雪松.一种单目摄像头测量面积的方法和系统:CN104537661A[P].2015−04−18.
6 ZHANG H Y.Multiple moving objects detection and tracking based on optical fl ow in polar-log images[C]//International Conference on Machine Learning and Cybernetics(ICMLC),2010:1577−1582.
7 MUELLER M,KARASEV P,KOLESOV I,et al.Optical lfow estimation for fl ame detection in videos[J].IEEE Transactions on Image Processing,2013,22(7):2786−2797.
8 BARRON J,FLEET D,BEAUCHEMIN S.Performance of optical f l ow techniques[J].International Journal of Computer Vision,1994,12(1):43-77.
9 BRUTZER S,HOFERLIN B,HEIDEMANN G.Evaluation of background subtraction techniques for video surveillance[C]//IEEE Conference on Computer Vision and Pattern Recognition(CVPR),2011:1937−1944.
10 POWER P W,SCHOONEES J A.Understanding background mixture models for foreground segmentation[C]//Proceedings Image and Vision Computing,Auckland:University of Auckland,2002:267−271.
11 ZIVKOVIC Z,HEIJDEN F.Efficient adaptive density estimation per image pixel for the task of background subtraction[J].Pattern Recognition Letters,2006,27(7):773−780.
12 LIPTON A J,FUJIYOSHI H,PATIL R S.Moving target classif i cation and tracking from real-time video[C]//IEEE Workshop on Applications of Computer Vision,1998:8−14.
13 贺贵明,李凌娟.一种快速的基于对称差分的视频分割算法[J].小型微型计算机系统,2013,24(6):966−968.
14 林洪文,涂丹,李国辉.基于统计背景模型的运动目标检测方法[J].计算机工程,2014,29(16):97−99.
15 FERMULLER C,SHULMAN D,ALOIMONOS Y.The statistics of optical f l ow[J].Computer Vision and Image Understanding,2001,82(1):1−32.
16 MEYER D,DENZLER J,NIEMANN H.Model based extraction of articulated objects in image sequences for gait analysis[C]//International Conference on Image Processing,1997:78−81.
17 MAKK,WANGHY.Region-basednonparametric optical f l ow segmentation with pre-clustering and postclustering[C]//International Conference on Multimedia and Expo,2002:201−204.
