基于无人机的船舶尾气检测系统设计
2018-06-29史华杰安博文潘胜达白响恩
史华杰,安博文,潘胜达,白响恩,周 凡
(上海海事大学 信息工程学院,上海 201306)
随着我国航运事业的高速发展,各大港区的船舶流量不断加大,船舶尾气污染日趋严重。为应对当前节能减排的国际形势,国内部分港区开始建立船舶尾气排放区。经调研,目前在海事监管领域中对于港区船舶尾气排放的监管,首先人为通过视觉观察船舶烟囱口的尾气排放情况,然后选择性地登船,进行燃油取样,送第三方检验部门做化验分析,最后以油样的相关指标参数作为船舶是否排放超标的依据。而得到检查结果一般需要2天以上的时间。因此,该方法检查目标较随机,针对性不强,效率相对较低。
无人机因具有轻巧灵活、装载方便等优点,在船舶的动态管理、防污染监视、执法取证等方面具有其他方式不可比拟的优势。用无人机装载气体检测设备,沿港区航线飞行,就可以快速检测港区各艘船舶的尾气浓度,根据燃料油的硫含量与尾气中SO2浓度关系,即可间接检测出燃料油中的硫含量范围。然而,现今国内已有的气体检测设备[1-3]主要针对火力发电厂、石油化工企业等行业,其主要检测方式都需要固定安装在烟囱上,设备体积庞大,因此无法装载到无人机上。此外,还必须先通过燃烧试验,确定燃料油的硫含量与尾气中SO2两者的定量关系。针对以上问题及需求,文中设计了基于无人机的船舶尾气检测系统。
1 系统总体规划
基于无人机的船舶尾气检测系统的整体结构如图1所示。其结构分为3层:数据采集层、处理层和表示层。

图1 检测系统的整体结构Fig.1 Overall structure of detection system
数据采集层包括气体检测吊舱系统和AIS基站,分别用于采集气体浓度和船舶信息。其中气体检测吊舱系统选用STM32为主控芯片,以GPRS(general packet radio service)作为网络基础,将检测数据通过IP数据流的方式传输至数据处理层。AIS(automatic identification system)基站通过 VHF天线,可接收附近海域船舶的VHF信号,并通过RS485将AIS报文传输至数据处理层。
数据处理层主要实现2个功能模块:①接收、解析并存储AIS和气体检测信息;②融合船舶和吊舱系统的GPS信息,识别对应船舶的尾气浓度。
数据表示层利用WebGIS技术,将船舶与吊舱设备制作成地图符号,在地图界面上动态渲染检测信息。
2 系统设计及实现
2.1 气体检测吊舱系统
针对无人机载重的局限性,设计了气体检测吊舱系统。吊舱系统负责气体浓度的检测、传输。
2.1.1 气路结构
气体检测的主要对象是停靠于港区船舶的烟囱口排放的尾气。为了提高检测结果的可靠性与精度,在检测时需要控制检测设备靠近尾气排放的烟囱口。由于所排放烟气带来的高温会对检测设备产生影响,降低检测设备的检测精度和使用寿命,严重时甚至造成设备的永久损坏。为此,气体检测吊舱系统采用如图2所示的气路结构设计。

图2 气路结构Fig.2 Gas path structure
由图可见,在轻量化外壳内部设定了1个小型气泵负责抽取冷却管中的气体,烟气体通过长度1 m的耐高温冷却管,冷却降温后再进行尾气检测,以防止烟气温度过高对传感器以及控制中心的破坏;使用除湿过滤装置,对采集的气体进行除湿过滤,以防硫氧化物遇水形成液态酸性物质腐蚀整个设备;待测气体进入传感器室,经过渗透膜后进入电解槽,使在电解液中被扩散吸收的气体在规定的氧化电位下进行电位电解,根据耗用的电解电流求出该气体的浓度,获取气体中的含硫浓度,最后气体从出气接口排出。
2.1.2 电子学结构设计
气体检测吊舱系统电子学结构图3所示。在该结构中设计两级电源转换,采用MP2303A作为一级电源,MP2303A将28 V降至5 V,为SIM868模块和传感器模块提供工作电压;AMS1117-3.3作为二级电源,将5 V降至3.3 V,其主要作用是为STM32提供稳压电源。其中SIM868模块作为通讯模块,该模块需外接GPS和GPRS天线,用于获取经纬度信息和传输检测信息,为此轻量化外壳设计了GPS和GPRS天线接口。核心板选用STM32F103作为主控芯片。
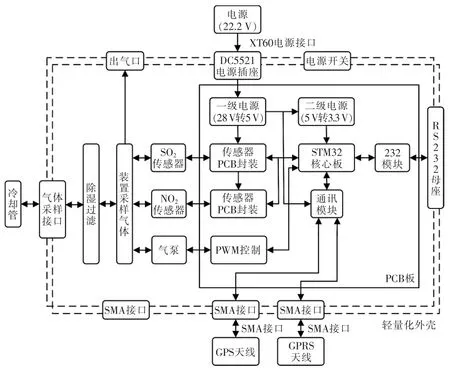
图3 吊舱系统电子学结构Fig.3 Pod system electronic structure
2.1.3 软件设计
该系统采用 FreeRTOS操作系统[4],FreeRTOS每个执行的线程都被称为“任务”。程序设计中需要对各个任务进行调度。FreeRTOS共有4种任务状态,分别为挂起、就绪、阻塞、运行。任务之间的数据传输,设计使用向队列中传入结构体的方式来实现。如图4所示,首先队列中数据为空,当任务A完成后,将数据发送到指定队列中,然后任务B从队列中获取数据,最后删除队列中已被获取的数据,队列再次为空。
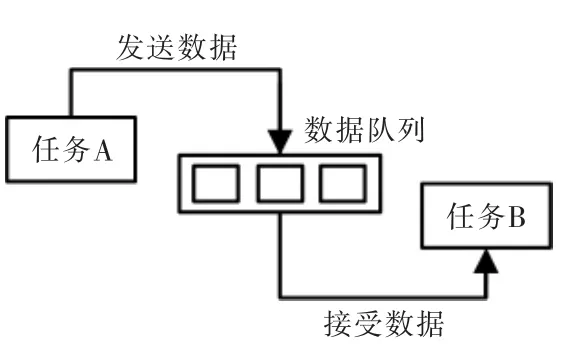
图4 数据传输方式Fig.4 Data transmission method
该检测系统的主要任务是传感数据的采集和传输。针对传感数据的采集和传输,采用阻塞态的同步事件和队列数据传输方式实现。数据采集和传输流程如图5所示。

图5 传感器信息处理流程Fig.5 Sensor information processing flow chart
当UART中断未发生时,中断服务例程和中断延迟处理均处于阻塞状态,当UART中断发生,中断服务例程从阻塞状态转换成就绪状态,等待任务调度器调用,中断服务例程完成后,将采集数据结构体存放至数据队列中。中断延迟处理函数首先获取信号量,若信号量有效,则等待延迟,接着从数据队列中获取采集数据结构体,然后控制中心通过AT指令集,控制通讯模块SIM868芯片,获取当前GPS信息和网络时间,最后将数据信息编码,通过IP数据流的方式传输到数据服务器。其中对于数据处理层和气体检测吊舱系统的双向数据传输,气体检测吊舱系统设定为客户端,主动连接数据处理层的IP和端口。
为保证延迟处理任务仅处理一次有效的采集数据报文,则三者的时间应满足

式中:Ts为延迟信号量;Ti为传感器数据固定上传传输数据的时间间隔;Td为延迟函数处理时间。
由于网络延迟等其他原因,气体浓度采集报文在GPRS网络传输的过程中,存在信息报文缺失的情况,为保证传输过程中信息的完整性,采用的传输协议见表1。

表1 气体检测传输协议Tab.1 Gas detection and transmission protocol
该协议采用前38按位相加再取反+1方式生成校验码。接收方首先需通过按照前38位生成校验码,然后与传输信息中的第39位校验码对比,若相等,表示气体浓度信息完整,则正常解析;若不相等,表明该信息为错误信息,则丢弃该条报文。
2.2 数据处理层
2.2.1 AIS 数据报文
ITU-R M.1371.5建议书在 VHF水上移动频段使用时分多址的自动识别系统的技术特性[5]确定了AIS报文格式。AIS共有27类不同内容的消息报文。该系统需检测在港区运动船舶的信息。对于运动船舶的消息报文的类型分别为 1,2,3,18,19。 解析这5类消息,可以获取船舶的经度、纬度、地面航速、地面航向等信息。
2.2.2 匹配对应船舶的尾气浓度
将船舶信息和吊舱检测信息进行融合,匹配对应船舶排放的尾气浓度。尾气吊舱和船舶位置关系如图6所示。
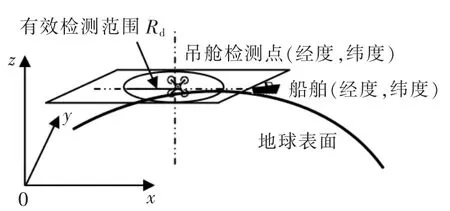
图6 检测点和船舶的相对位置Fig.6 Relative position of detection point and ship
在不考虑其他因素的情况下,可知尾气吊舱设备的有效检测范围为Rd。若可求得附近各艘船舶与吊舱设备的相对距离Lab,那么当船舶与吊舱设备相对距离满足Lab<Rd条件时,吊舱设备当前检测的气体浓度即为对应船舶尾气排放的浓度。根据AIS报文和采集数据报文,已知条件为吊舱设备和船舶的经纬度,为此首先需根据两者间的经纬度求其相对距离 Lab。
设A为船舶,B为吊舱设备,已知A的经纬度为(Aj,Aw),B 的经纬度(Bj,Bw),地球半径为 R。 吊舱设备相对于地面的高度相对于地球半径而言相对较小,故在此忽略吊舱设备距离地面的高度。
当两点间距离较近时,采用式(2),求出AB间的距离 Lab,即
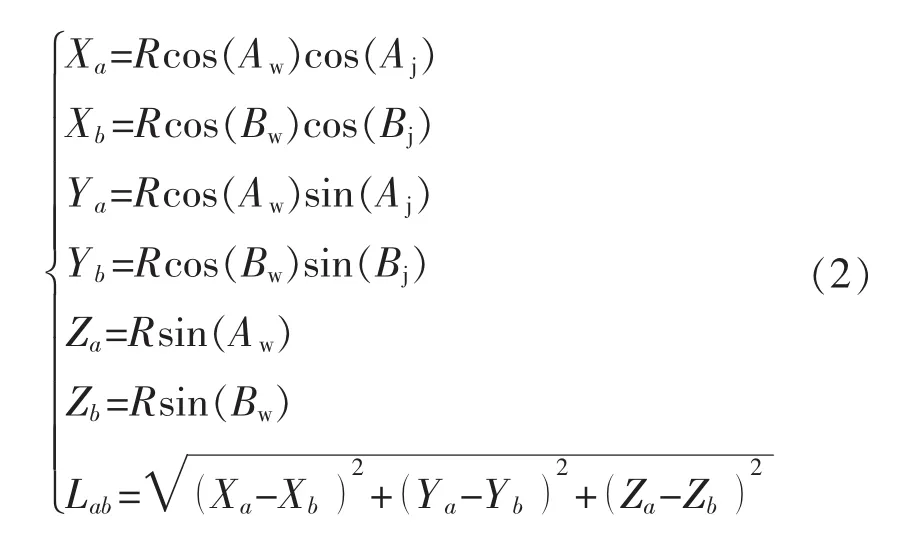
式中:Xa,Ya,Za为三维直角坐标下点 A 的坐标;Xb,Yb,Zb为三维直角坐标下点B的坐标。遍历数据库中的船舶数据,当Lab<Rd时,当前时刻吊舱设备检测的气体浓度即为对应船舶的尾气排放浓度。
2.3 数据表示层
数据表示层以WebGIS的方式实时渲染检测信息。对WebGIS的二次渲染,采用第三方开源库OpenLayers进行地图数据的渲染。OpenLayers是一个专为WebGIS客户端设计并用于实现标准格式发布的类库,其整体结构如图7所示。
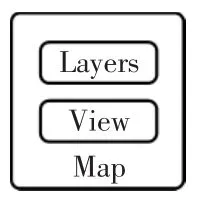
图7 OpenLayers架构Fig.7 OpenLayers structure
图中,Map为地图容器;View为负责地图的中心点和投影;Layer资源数据的图层。其中Layers分为 Tile,Image,Vector三类图层。 Vector层主要用于客户端渲染矢量数据。该检测系统主要在Vector图层对船舶信息和检测信息符号化,对地图进行二次渲染。地图要素是构成地图的基本要素,且各要素具有唯一标识号。根据数据库主键的唯一性约束,设计主键与地图要素标识号一一对应。对船舶和吊舱信息实时渲染的流程如图8所示。

图8 WebGIS数据渲染流程Fig.8 WebGIS data rendering flow chart
客户端首先创建AJAX对象,然后以POST方式向后端请求信息,后端服务器根据请求参数,遍历数据库并查询检测信息,正常获取信息后并将该信息编码成JSON格式的数据报文发送至客户端。客户端获取并解析检测信息报文,根据检测信息的唯一标识号,遍历地图上的已存在要素,若返回值为空,则创建新要素,并添加到矢量图层。反之,则获取该要素并更改要素的属性,最后刷新整个矢量图层。
为了更加明显区分不同时间段的船舶,对于船舶符号,系统设计了2套不同颜色的船舶,黄色船舶符号为当前系统时间与接收到AIS报文时间差超过0.5 h以上的船舶,绿色船舶符号则为时间差在0.5 h以内的船舶。
3 系统的测试与分析
该船舶尾气检测系统设计完成后,分别在实验室和港区对该系统进行测试。尾气燃烧实验室测试现场和港区实测现场如图9所示。
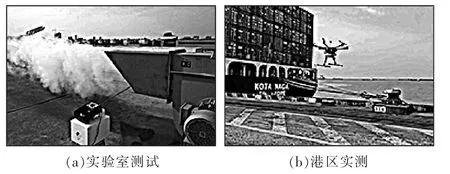
图9 系统测试现场Fig.9 System test site
不同硫含量的燃料油可以影响发动机排放的SO2浓度。实验室分别对硫含量(质量分数)0.52%和0.706%的燃料油进行了燃烧试验,以获得不同硫含量的燃料油与尾气中SO2浓度的定量关系。实验室尾气燃烧的环境参数如下:温度25℃,相对湿度61%,风速3 m/s;发动机转速89 r/min,功率892 kW。实验室烟囱口直接测试所得的实际尾气排放测试结果如图10所示。

图10 实验室烟囱口直接测试的尾气排放浓度Fig.10 Emission concentration of laboratory chimney exhaust gas
根据图10烟囱口的直接测试结果显示,硫含量为(质量分数)0.706%的燃料油,其排放的尾气中SO2排放浓度均值为384 mg/m3;硫含量(质量分数)0.52%的燃料油,其SO2排放浓度均值为228 mg/m3。可见,船舶排放的尾气中SO2浓度,随燃料油中硫含量的减少而减少。
根据港区实际检测数据绘制的数据折线如图11所示。无人机吊舱检测数据受无人机实际飞行时采样点位置的影响,且吊舱测得的数据受风速风向影响较大,因系统测试当天港区风力较大,故测试结果起伏较为明显。
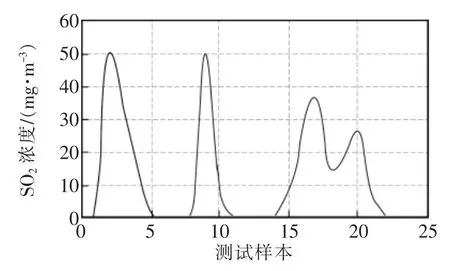
图11 港区无人机飞行检测的数据折线Fig.11 Data folding of flight detection for UAV in port area
数据表示层对检测信息的实时渲染效果如图12所示。其中,图12a为网页地图对于检测信息渲染的整体效果,图12b为无人机吊舱实时显示的检测数据,图12c为船舶运行的动态信息。
数据表示层对于无人机自动巡航检测到的各艘船舶排放SO2的浓度信息统计汇总如图13所示。 其中,SO2浓度/(mg·m-3)和燃油硫含量(质量分数)的映射关系,以实验室燃烧试验的结果作为标准。
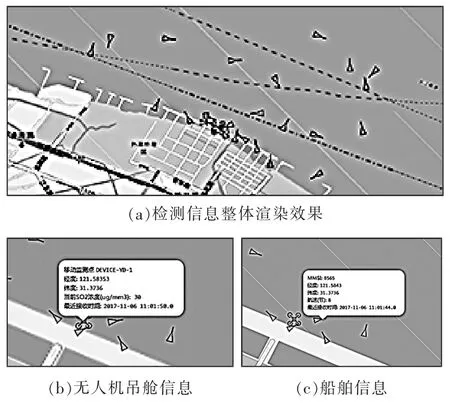
图12 GIS实时信息Fig.12 GIS real-time information
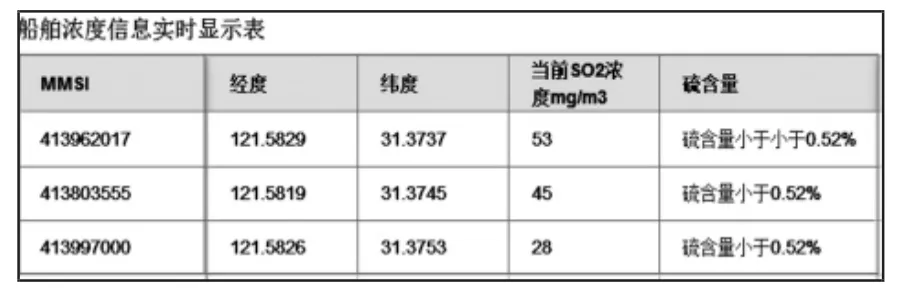
图13 船舶尾气排放实时显示Fig.13 Real-time display of ship exhaust emission
经过实际测试,根据检测尾气中SO2的浓度来间接测量燃油硫含量范围的方法,具有一定的可行性。在港区的实际测试中,该系统可以自动识别船舶,并确定尾气中SO2的浓度以及燃油中硫含量的范围。
4 结语
结合海事监管的实际需求,设计了基于无人机的船舶尾气检测系统。该系统借助无人机灵活、方便装载的优点,能够快速巡航并自动检测船舶的SO2浓度和燃油中的硫含量,与原来的检测方式相对比,降低了人力、时间成本。目前实验室仅对2种不同硫含量的燃料油完成了燃烧对比测试,后续还将开展更多的燃烧测试,以测定不同燃料油的硫含量与尾气中SO2定量关系。
[1] 甘平,徐子航,胡国文,等.基于GPRS的远程可燃气体检测系统研究与设计[J].实验室研究与探索,2013,32(9):54-56.
[2] 郭月俊.采用ARM技术的TDLAS型甲烷气体检测系统的研制[D].北京:中国科学院大学,2014.
[3] 谢宜炜,孙永明,王亮,等.船舶柴油机尾气检测系统设计研究[J].船海工程,2012,41(1):57-59.
[4] Divakaran S,D’Souza D,Kushwah A,et al.Refinement-based verification of the FreeRTOS scheduler in VCC[C]//Formal Methods and Software Engineering.Springer International Publishing,2015.
[5] 国际电联无线电通信部门.ITU-R M.1371-5建议书:在VHF水上移动频段使用时分多址的自动识别系统的技术特性[S].日内瓦:国际电信联盟,2014. ■
