海上风电机组延伸腿上移式张力腿基础的运动性能研究
2018-06-28上海绿色环保能源有限公司任浩翰顾李凌
上海绿色环保能源有限公司 ■ 任浩翰 顾李凌
上海勘测设计研究院有限公司 ■ 范可*
0 引言
深远海域风能资源丰富,可开发性好。漂浮式海上风电机组不仅能适应深远海域的水深条件,弥补了固定式海上风电机组基础因水深不足而造成经济性差这一缺点,而且对远海孤立岛屿的开发有着重大意义。张力腿(Tension Leg Platform,TLP)基础作为海上风电漂浮式基础最重要的基础结构形式,研究其运动响应影响因素具有重大意义。
现有的TLP式海上风电机组基础主要有经典TLP式、海之星TLP式和赛莫斯TLP式[1],如图1所示。由于TLP式海上风电机组基础是由TLP式海上石油基础演变而来,且目前建成的TLP式海上风电机组基础的工作水深基本达百米深,张力筋长度足够。但对于我国东海海域而言,水深条件较差,张力筋长度的缩短会大幅增大基础结构的固有频率,对其运动性能有不利影响。本文的研究基于一种延伸腿上移式TLP基础,如图2所示,研究结合上海周边水文测站及已建风电场的水文、风资源数据,建立与上海市外海环境荷载相适宜的数学模型。
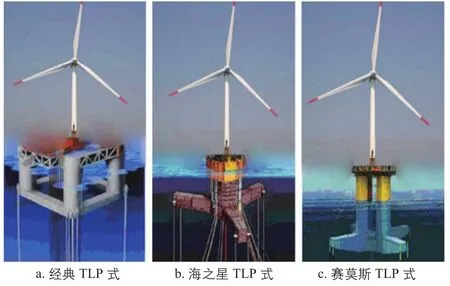
图1 3种TLP式海上风电机组基础
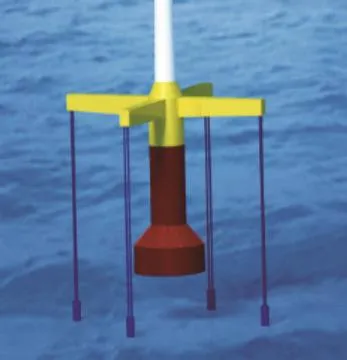
图2 延伸腿上移式TLP基础
1 荷载条件
1.1 波浪荷载
波浪数据利用东海海域大戢山海洋测站的长期观测数据,得到用于数值模拟的风电场波浪数据,如表1所示。
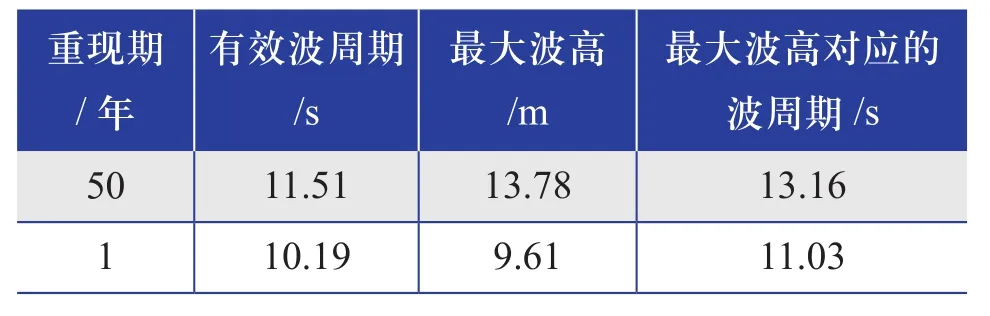
表1 波浪条件
1.2 海流荷载
海流数据参考大戢山海洋测站4个站点E1~E4的长期观测数据,得到用于数值模拟的风电场海流数据,如表2所示。其中,H代表水深;V代表海流流速;D代表海流的流向角度。
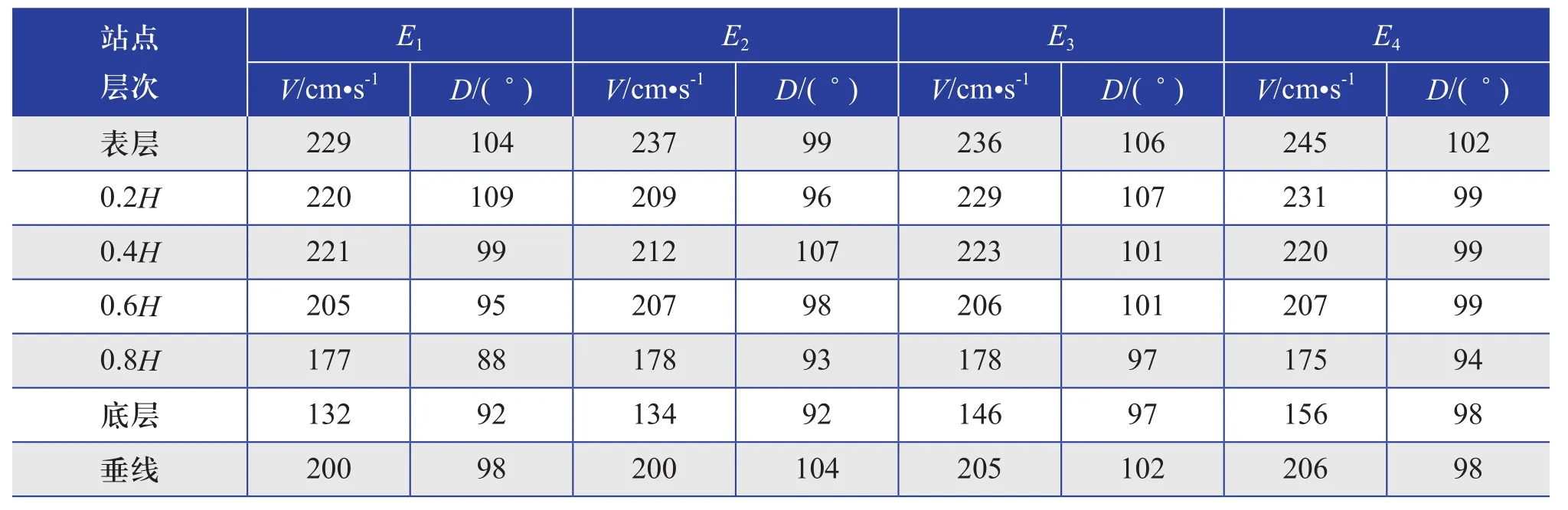
表2 最大海流流速
1.3 风电机组荷载
风电机组荷载包含风荷载因素,参照已建海上风电场的同等量级发电量的风电机组荷载参数实测数据,模拟计算使用对应工况的风电机组荷载时程曲线进行加载。
2 数值分析
本研究以6 MW海上风电机组作为目标基础风电机组,建立延伸腿上移式TLP基础模型,如图3所示。图4为传统延伸腿式TLP基础模型,其基础结构参数如表3所示。
2.1 基础结构频域分析
RAO(Response Amplitude Operator)为幅值响应算子,是波浪波幅到漂浮式基础各位置参数的传递函数,反映单位波浪作用下漂浮式基础自由状态的运动情况。
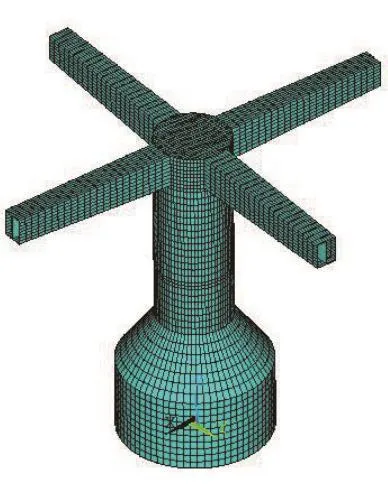
图3 延伸腿上移式TLP基础模型
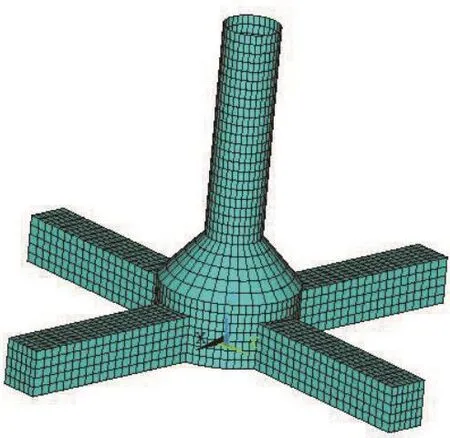
图4 传统延伸腿式TLP基础模型
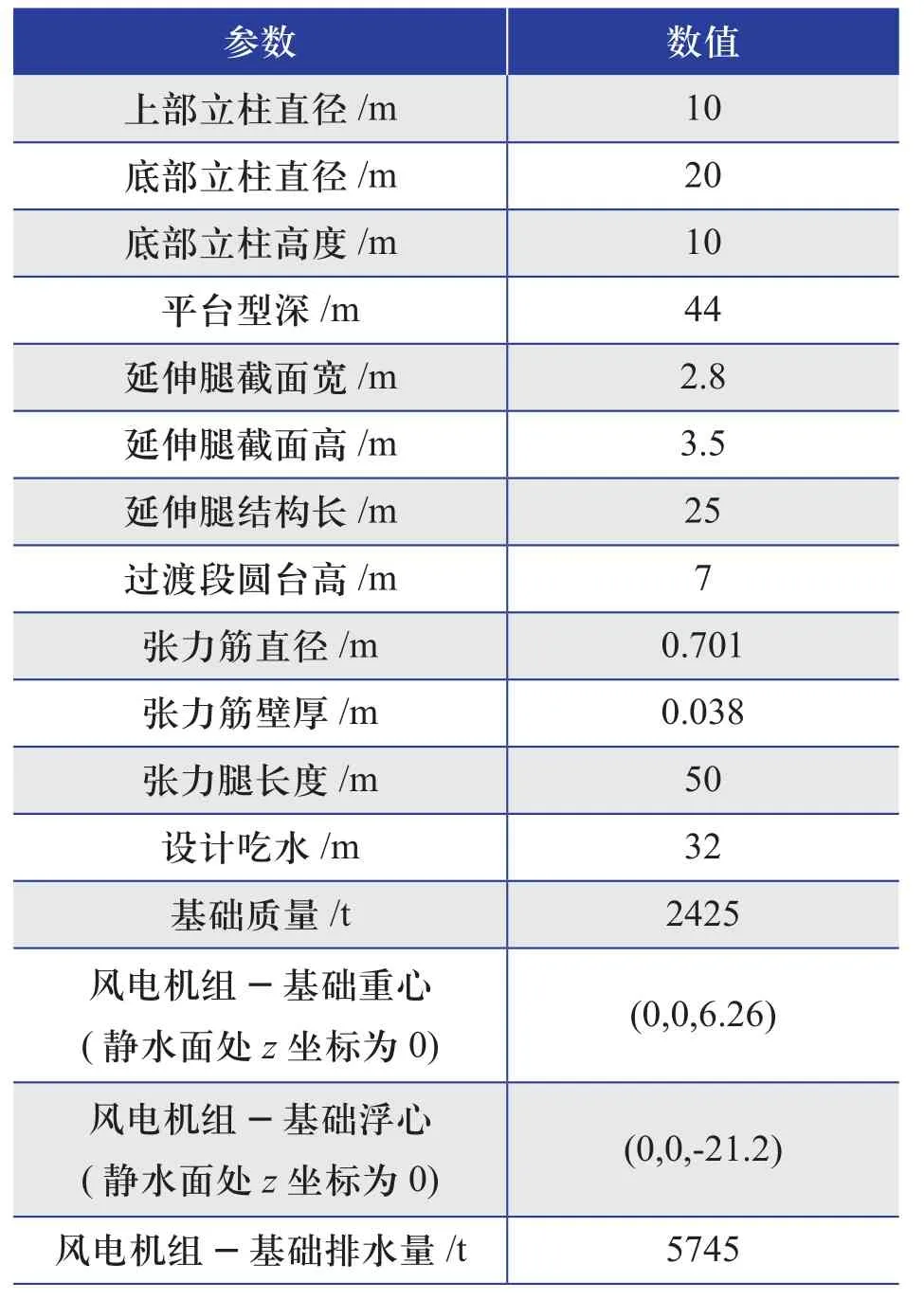
表3 传统延伸腿式TLP基础结构参数
从图5~图8的基础结构自由运动响应RAO可以看出,该基础纵荡自由度上的运动响应RAO随着频率数值的增大而减小,并随波浪入射角的增大而减小;对于基础垂荡自由度上的运动响应RAO,不随波浪入射角的改变而改变,在频率为0.33°/s时有最大值,即对应波浪周期为19 s时,其自由运动状态下运动响应有最大值,考虑TLP基础对垂荡方向的约束较为严格且其在垂荡方向上会产生高频振动,因此其频率值较安全;该基础横摇自由度上的运动响应RAO随着波浪入射角的增大而增大,在频率为0.3°/s时有最大值;该基础艏摇自由度上的运动响应RAO数值较小,随波浪入射角的增大先增大后减小,在入射角为45°时有最大值,在频率为0.7°/s时有最小值,在频率为1.48°/s时处有最大值。
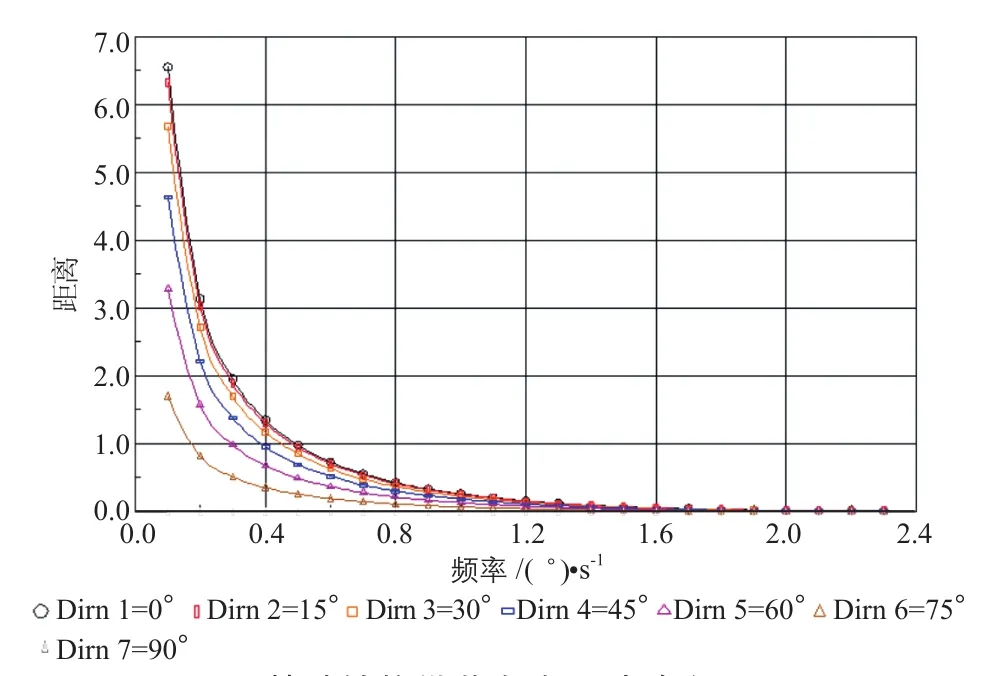
图5 基础结构纵荡自由运动响应RAO

图6 基础结构垂荡自由运动响应RAO
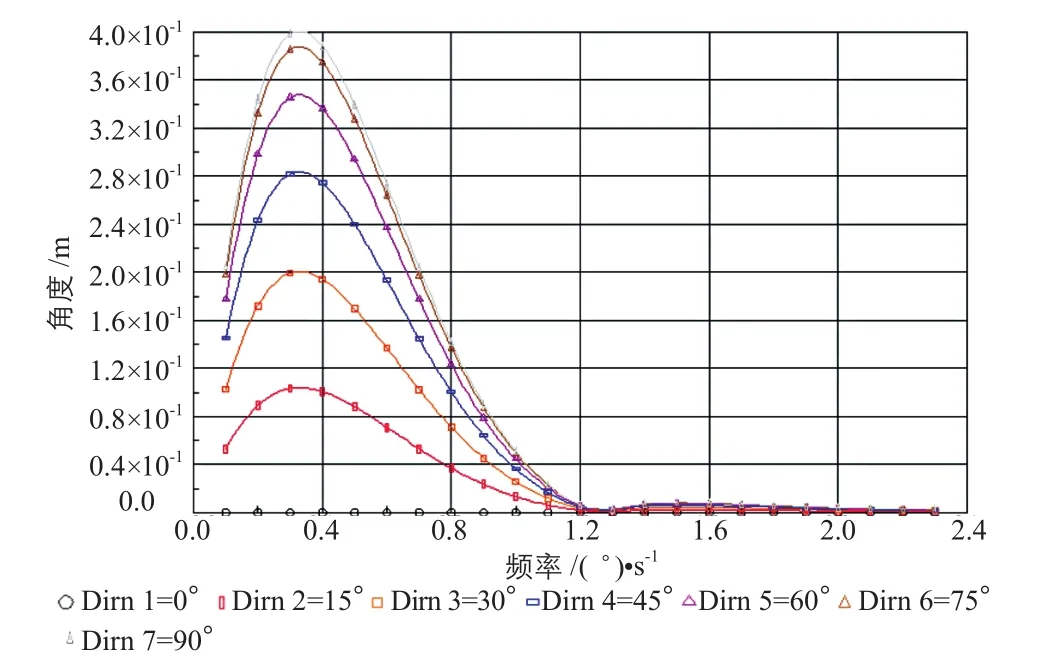
图7 基础结构横摇自由运动响应RAO
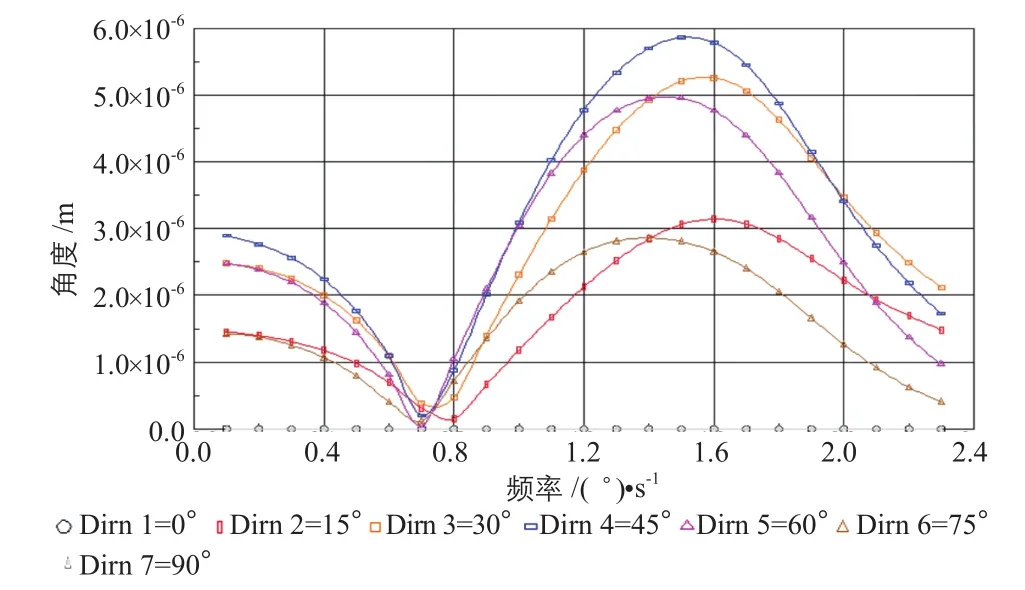
图8 基础结构艏摇自由运动响应RAO
2.2 基础结构时域分析
基础运动响应时域分析结果是基础运动特性的直观反映。首先可以通过模拟静水衰减实验得到基础的固有频率;然后选取正常使用状态极限工况和承载力极限状态工况进行运动响应时域分析,通过得到的基础结构纵荡(横荡)、垂荡、横摇(纵摇)和艏摇自由度上的基础位移和加速度变化,可以直观反映出基础结构的水动力特性;同时还可以通过得到的张力筋腱的拉力曲线来判断张力筋的受力情况。
2.2.1 基础结构固有周期
结构的固有周期影响着结构的运动响应及结构疲劳。通过模拟静水衰减实验,得到如表4所示的结构固有周期。从图4可以看出,相比于传统延伸腿式TLP基础,延伸腿上移式TLP基础横荡、纵荡自由度上的固有周期有了显著提高。由于延伸腿上移式TLP基础结构在垂向抑制、水平向自由的特点,其垂荡固有周期较小,为0.4 s;横摇、纵摇自由度上固有周期受到结构垂向位移的限制,其固有周期较自由运动状态下大幅减小,为0.8 s;而在水平面内,由于没有约束作用,其横荡、纵荡周期均为24 s;基础艏摇周期为3.2 s,相比传统延伸腿式TLP基础有所减小,这与基础结构延伸腿的提高改变了基础重心和浮心的相对位置有关。延伸腿上移式TLP基础的6自由度固有周期均避开海浪能量集中区域周期5~15 s,结构运动性能良好。

表4 基础结构固有周期
2.2.2 基础结构运动响应
在时域分析中,选取正常使用状态极限工况和承载力极限状态工况;波浪荷载采用1年一遇和50年一遇的Jonswap谱,海流作用方向与波浪荷载方向一致;风荷载使用对应工况的风电机组荷载时程曲线进行加载,风向与波流方向夹角从0°~45°不等,得到基础结构运动响应均值,如表5所示。
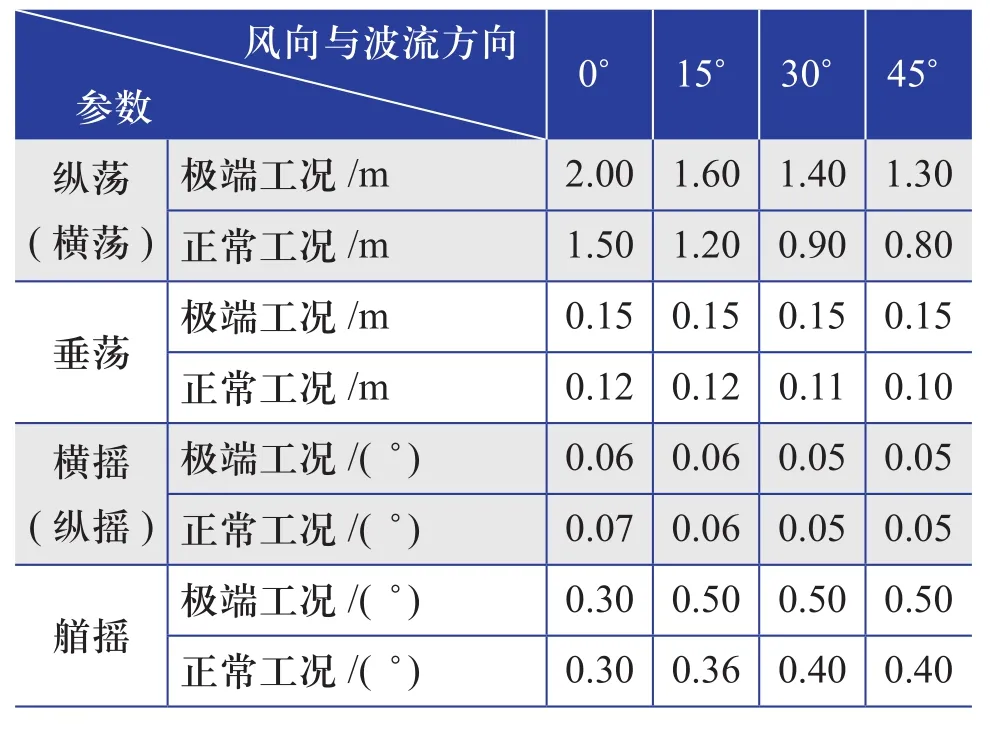
表5 基础结构运动响应均值
由风电机组基础运动响应结果可以看出,在纵荡和横荡自由度上的运动响应随风浪流夹角的增大而减小,运动响应数值较大;极端工况中,风浪流同向时基础最大平均漂移为2.0 m,这是由于结构在水平面内约束自由,风浪流同向作用在结构上时会加剧结构在该方向上的运动偏移。基础垂荡自由度上的运动响应受风浪流夹角影响较小,垂荡运动较为稳定,这与TLP基础系泊方式有关,其运动响应满足TLP基础结构运动响应要求。基础横摇、纵摇和艏摇自由度上的运动响应受荷载作用影响较小,符合TLP基础结构运动响应特点,满足运动响应要求[2]。
通过水动力特性时域计算,得到正常使用状态极限工况和承载力极限状态工况下的结构加速度运动响应,如表6所示。
风电机组基础运动响应加速度对风电机组的正常运行和维护有着重要的意义,一般要求满足相关风电机组厂家提出的需用加速度即可。计算得出本基础结构运动响应的加速度满足要求。
该结构系泊系统由4根张力筋组成,通过基础结构运动响应时域分析,得到正常使用状态极限工况和承载力极限状态工况下的4根张力筋Tether1~ Tether4各自的受力情况,如表7所示。
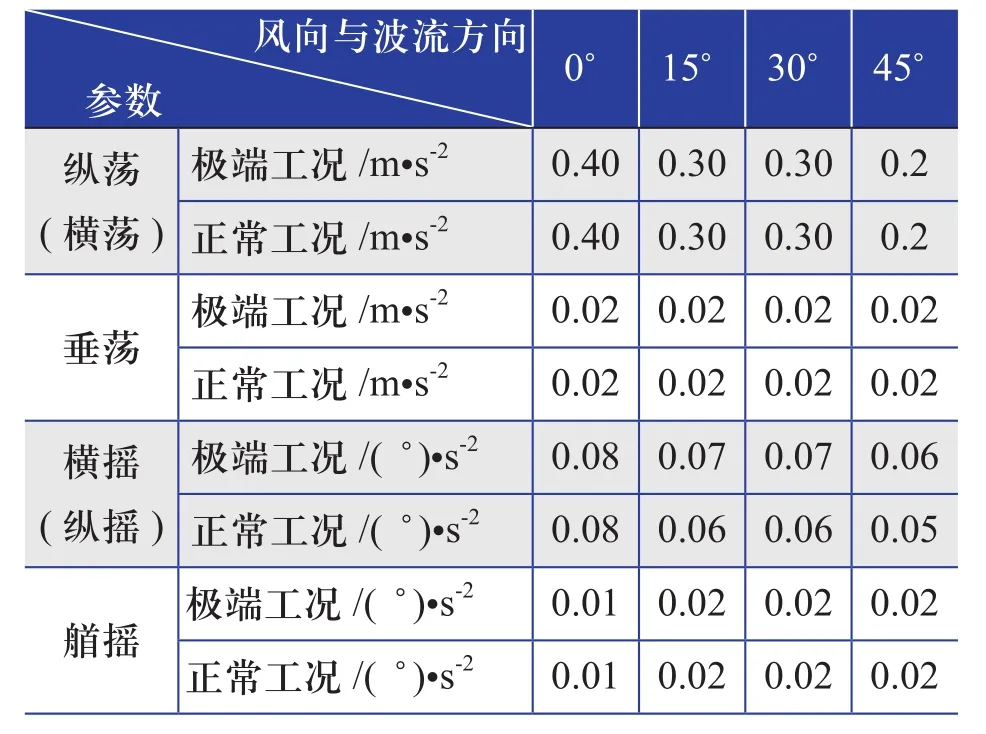
表6 基础结构加速度运动响应
由不同工况下风电机组基础张力筋的受力情况可以看出,基础结构中,基础张力筋受到的最大拉力和平均拉力较为接近,小于张力筋断破强度,张力筋受力均匀,且无松弛现象产生;对于传统延伸腿式TLP基础来说,由于基础结构水深限制,张力筋长度较短,张力筋受力不均匀,常有松弛现象产生,不能满足张力筋工作要求。延伸腿上移式TLP基础较传统延伸腿式TLP基础的张力筋受力性能优。
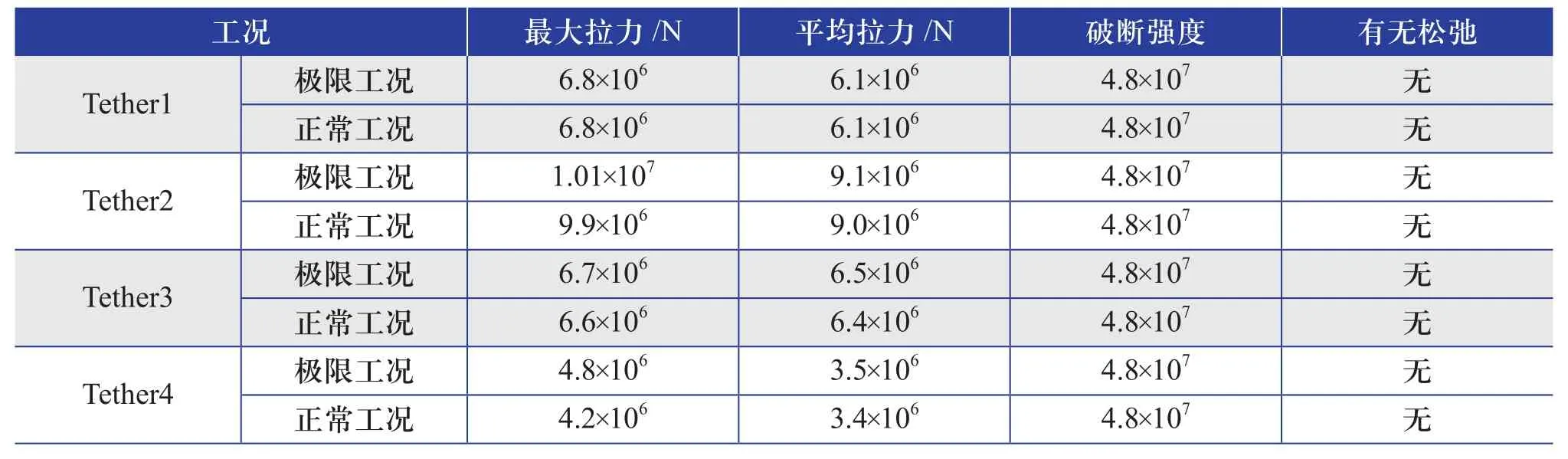
表7 基础结构加运动响应
3 结语
本文提出了一种海上风电机组延伸腿上移式TLP基础,并研究了其频域和时域的运动响应特性,采用实测波浪荷载,对其进行结构特性分析,得到如下结论:
1)延伸腿上移式TLP基础有助于提高结构水平面内自由度的固有周期,结构的纵摇、横摇有较好周期。
2)延伸腿上移式TLP基础增加了张力筋长度,有利于张力筋腱均匀受力。3)延伸腿上移式TLP基础在目标海况下,基础结构运动性能良好,运动响应满足设计要求。
[1]卫涛.基于TLP原理的海上风电机组浮式基础研究[D].镇江: 江苏科技大学, 2014.
[2]Casale C, Lembo E, Serri L, et al.Preliminary Design of a Floating Wind Turbine Support Structure and Relevant System Cost Assessment[J].Wind Engineering, 2010, 34(1):29-50.
