深远海域漂浮式风电基础水下安装机器人的适用性分析
2018-06-28上海电力实业有限公司董渝瑾
上海电力实业有限公司 ■ 董渝瑾
同济大学机械与能源工程学院 ■ 陆亮* 蔡文琪 乌建中 訚耀保
0 引言
近几十年来,伴随科技进步与经济发展,化石能源作为推动人类活动发展的载体日渐枯竭,而风能因具有较好的经济性、环保性及可持续性,成为新能源领域国家战略重要指向及政策扶持对象。围绕陆地风电和近海风电,国内已形成体系成熟、运作规范的风电市场。但近年来,由于陆地资源日益紧张、风电价格下调等原因,风电技术逐渐转向风力资源更为丰富、稳定、对环境影响相对较小的深远海域(离岸〉30 km,水深〉50 m)。深远海域风电因漂浮式基础而显著区别于陆地和近海风电,且其拖航与安装的工艺、设备及方法与其他二者存在本质区别,原有经验不具备完全的继承性。本文结合目前正在开展的上海市深远海域漂浮式风电示范工程项目,针对拟施工的上海东海海域的水下环境,展开了水下机器人的技术需求论证与分析,以求获得适用的水下机器人选型依据。
1 水下机器人技术发展简介
水下机器人是以最小风险帮助人类完成水下作业的先进设备,最早由军队开发,用于排除鱼雷。1966年,美国海军生产的世界第一台遥控型水下机器人“Curv”号于西班牙海域成功打捞起一枚因事故而遗失的氢弹,加速了各国对于水下机器人技术的研发[1]。10年后,海洋开发速度加快,因开发深度超过潜水员下潜深度,水下机器人成为深海开发不可缺少的技术手段。20世纪80年代,世界石油行业衰退导致经济增速放缓,但因水下机器人在海洋战略中的重要地位,各国对其的研究开发未曾中断。1995年,日本自主研发的“海沟号”水下机器人成功下潜至马里亚纳海沟最深处(10991 m),创造了人造深潜器下潜深度的世界纪录[2]。在下潜能力不断加强的同时,水下机器人也在朝着智能化的方向发展。伊拉克战争期间,美国在伊拉克盖斯尔港投放使用了新式智能型水下机器人“海神之子”,使原来需要21天完成的排雷工作缩减至16 h。除科研考察、水下排雷、敷设电缆等常规任务外,水下机器人还被用于进行事故残骸的探测工作,比如,1985年“泰坦尼克”号残骸位置的发现,以及对于MH370残骸的打捞,均使用了水下机器人技术[3]。
国内水下机器人研究起步较晚,20世纪70年代末,由沈阳自动化研究所和上海交通大学联合研制出国内第一台无人下潜器“海人一号”,受限于当时的条件,其下潜深度仅200 m,但“海人一号”的诞生为国产水下机器人的发展打下了坚实的基础[4]。1994年,由封锡盛院士主持开发的无缆型水下机器人“探索者号”在三亚成功下水,并下潜至1000 m水深处[5]。2年后,为加快开发海洋资源,作为国家“863计划”之一的“CR-01”无缆型水下机器人,随海洋考察队赴太平洋进行了为期39天的海洋考察任务,历经数百次下水作业,下潜深度达到了6000 m[6]。此后在“CR-01”的基础上,我国又相继开发了“潜龙一号”“海潜二号”“北极ARV”等国产水下机器人,其中“北极ARV”[7]参与了2008年北极科考,获得了关于北极冰川厚度、海冰形状等一系列的科研数据。2012年,我国自主研制的“蛟龙号”[8]载人潜水器成功下潜至7062.68 m,并利用机械手完成了水下标本的采集。
综上所述,水下机器人因实际需求,已开始向更深海域、更复杂功能及更完备人机交互方向发展。就漂浮式海洋工程装备与风电基础的施工辅助而言,水下机器人需要具有良好的监测能力,甚至需要进行稳定作业。根据施工需求的不同,水下机器人分为观测级和工作级。观测级水下机器人通常配备照明系统、拍摄系统及通信系统,工作级还需配备高性能推进器及机械手[9]。从通信与电力传输方式上看,水下机器人还分为有缆型和无缆型。有缆型作业时,先由母船将机器人投放至水中,下潜至一定深度后在定位系统引导下,机器人靠近目标并使用拍摄系统对目标进行近距离识别、拍摄及作业,完成作业后,操纵水下机器人回到母船附近水域,通过回收系统进行回收[10-11]。无缆型水下机器人通常用于勘测,在下水前向其控制器输入巡航轨迹,在巡航结束回收后再对其进行数据采集。由于无缆型水下机器人在巡航途中无法得到电源补充,因此,尽管其运动范围较有缆型更大,但续航能力较差,一般不用于监测与作业辅助。
随着海洋开发的快速发展,水下机器人产品大量涌现。除加拿大Shark Marine、荷兰Fugro及美国Oceaneering等欧美企业外,近年来,我国也出现了如RobotFish、深之蓝等生产水下机器人的公司,对市场技术也有较大贡献。表1为水下机器人主流产品的技术参数,针对海洋作业需求,水下机器人技术参数主要包括推进器、照明、通信及有无机械手等,这些参数与作业实际工况密切相关,欲获得合理选型,需结合实际海域情况及作业需求进行详细地论证分析。
2 基础安装与水下机器人功能需求分析
现有商用的漂浮式风电项目仅有已于2017年投入运营的Hywind项目。此项目位于纬度较高的欧洲海域,无长距离大江大河汇聚,水中的浮游生物及藻类少,水体自身透明度较高;同时地势平缓且海床稳固,桩基安装二次泥沙浑浊程度低。
本文所述的上海市深远海域漂浮式风电示范工程项目拟开展海域位于温带海域纬度较低的东海佘山岛附近,离岸800~1000 m,水深40 m左右;浮游生物、藻类易繁殖,水体自身透明度不高;同时长江水系流入,泥沙俱下,造成水体透明度差、水下可见度低等水下作业难题,对水下机器人选型设计提出了更高要求。
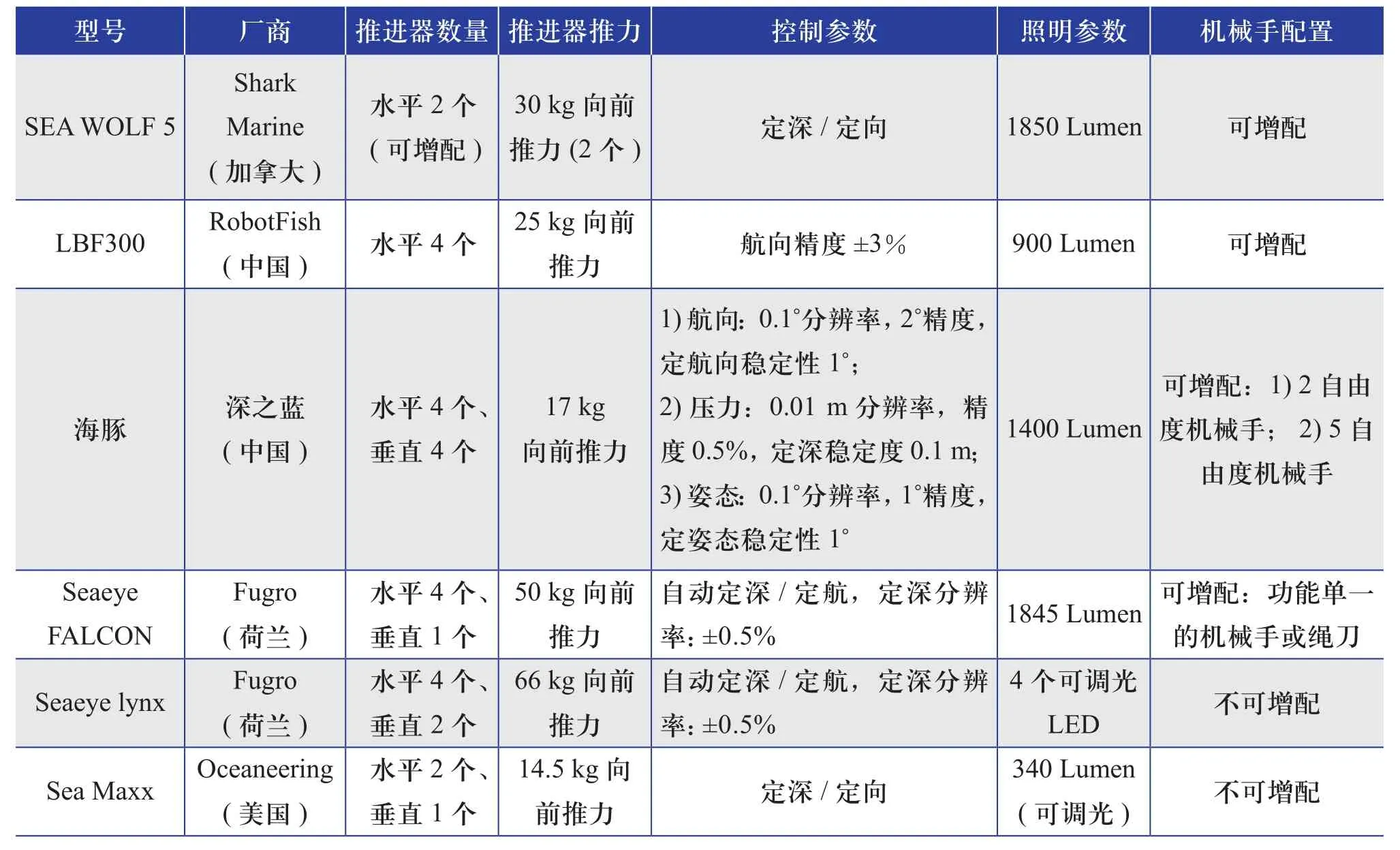
表1 水下机器人主流产品与技术参数
在对水下机器人具体功能参数做进一步筛选之前,首先要了解基础的拖航与安装流程,才能确定水下机器人的功能选项。就目前本项目40 m左右的水深而言,理论上,张力腿(TLP)式和半潜(Semi-Sub)式都可作为本项目实施的基础形式,但从风机基础一体化设计及服役过程的运维调控角度考虑,目前选择TLP式为主要研究对象。
图1给出了TLP式漂浮式基础拖航与安装的初步设想。首先,将风机与基础拖运至码头,完成组装后进行吊装;在驳船贴近风机后,使用驳船上的固定装置将驳船与基础进行系固;完成固定后,拖船将风机整体拖航至指定安装地点;在指定地点完成进点后,待驳船松开基础后进行筋腱安装;驳船脱离,安装完毕。
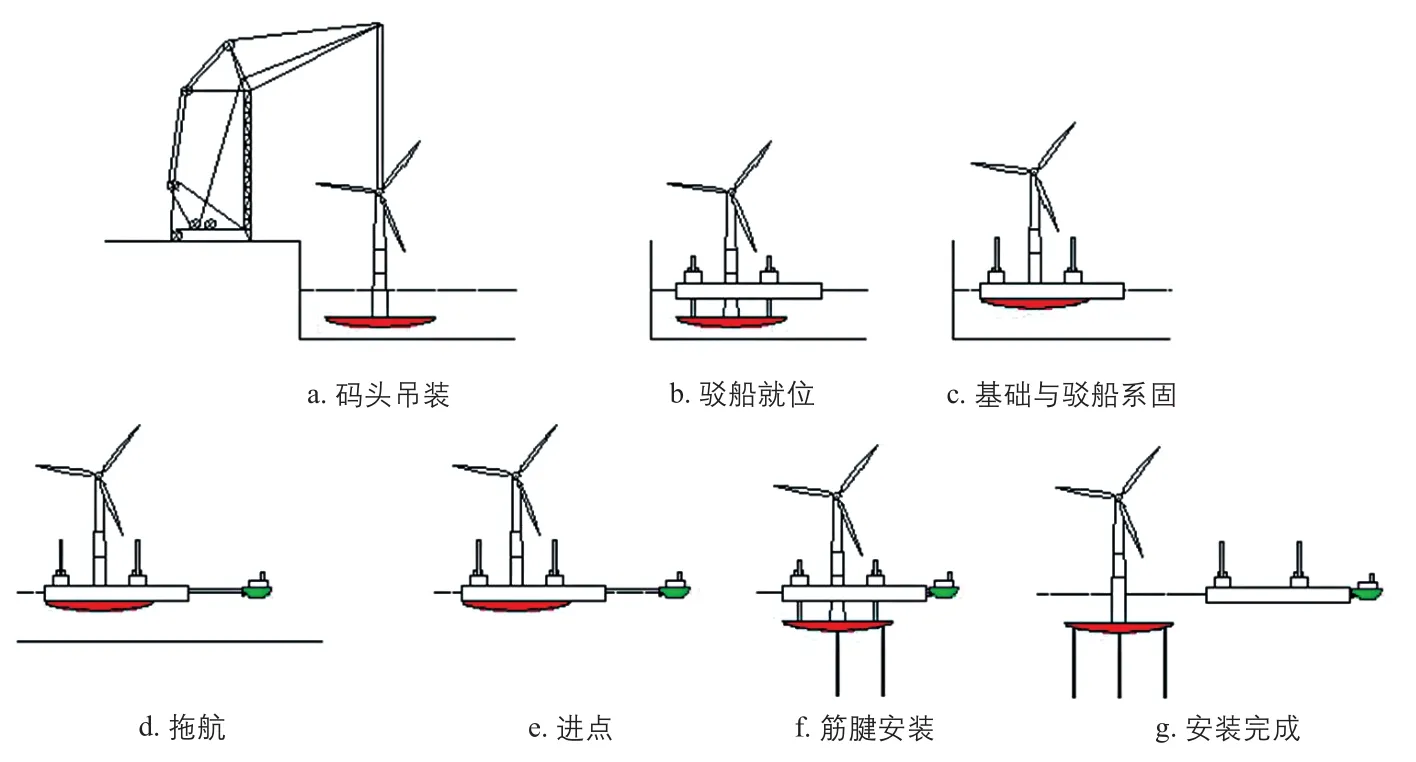
图1 本项目拟采用的施工与安装流程
就目前设想的拖航与安装流程而言,在驳船就位及其与基础系固的过程中(见图1b及图1c),可能需要使用水下机器人,且主要为观测级监测,也可以采用其他定位方式而不使用水下机器人。在筋腱安装环节(图1f)若采用水下机器人,则可大幅简化安装装置与工艺要求。
图2为某石油平台TLP基础筋腱水下连接过程与机器人辅助示意图[12-13]。如图2所示,首先进行沉桩(图2a);然后在指定地点进行打桩(图2b);将桩基打至固定深度后进行下连接部分桩套的安装(图2c);待筋腱部分在施工船上完成连接后,将其与桩基进行连接(图2d);完成下连接部分后,将基础部分拖至点位(图2e);之后对基础进行压载,使其沉至指定深度(图2f),完成与筋腱部分的上连接。在此过程中,水下机器人不仅通过监测功能配合了安装过程中的定位,也协同进行了辅助作业。
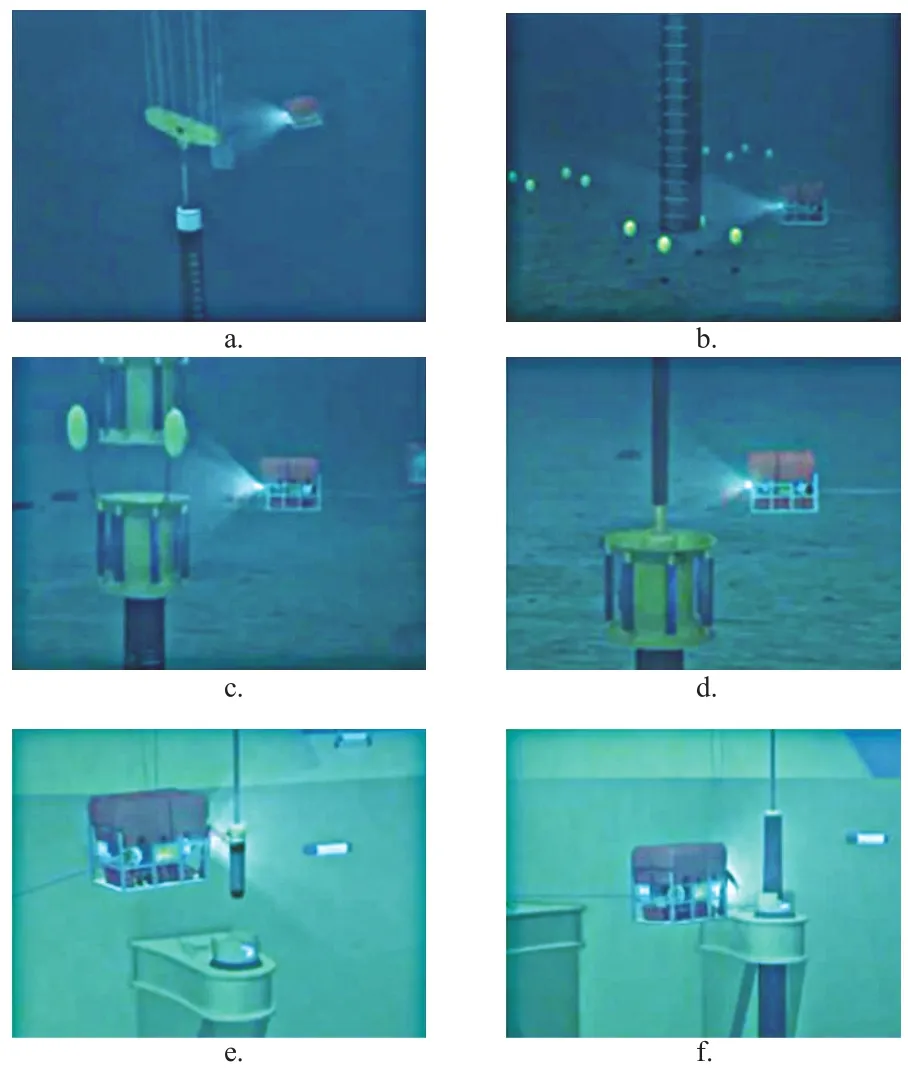
图2 筋腱安装过程[12-13]
基础、筋腱的安装过程中,需要使用水下机器人对桩基连接、筋腱连接进行监控;而在监控过程中,需要保证监控画面的实时性及平稳度。基于此,提出对水下机器人的需求在于水下监控的位姿控制、可视化清晰度及40 m深度通信的实现方式。
3 水下机器人论证选型
3.1 位姿控制
水下机器人在水下观测或作业时,受海流影响易失稳甚至抖动,因此,位姿控制十分重要。根据国家海洋局东海分局及国家海洋监测中心的数据显示[14],上海市佘山岛附近水深30~40 m的水域,海流平均速度为0.5节左右,一年中大部分时间为西南流。
就TLP基础水下连接而言,机器人在筋腱连接及灌浆过程中的监视或作业需保持稳定,而海流冲击,甚至脐带缆效应,均能影响机器人的稳定位姿。稳定位姿与推进器的动力及其分布密切相关。就动力大小而言,机器人需要抵抗海流的冲击[15],其中最主要的是抵抗水平方向上的海流。表2基于项目所在海域的海流情况,综合分析了海流产生的水平阻力和各水下机器人相应的推力数据,数据显示,表2所列产品均满足水平动力要求。

表2 机器人动力参数
另外,推进器的布置对稳定性的影响也十分关键。推进器的布置通常分为水平方向分布与垂直方向分布。水平方向上的主流形式为4个推进器前后分布,实现平移运动控制;针对目前工况,应该还需要转向动作,因此搭配可旋转推进器,可使机器人在保持稳定的同时更为灵活的调整位姿。而在垂直方向上,布置过多的推进器会产生相互影响[16],因此布置1~2个推进器为宜。表2中,Fugro公司Seaeye lynx与Seaeye FALCON两款产品在拥有较大的单位质量下前进推力的同时,还满足机器人推进和旋转的复杂功能需求,因此,这两款产品在位姿控制方面的优势较大。
3.2 水下监控
海底环境对机器人视觉的影响中,浊度为主要影响因素。按照国际标准化组织ISO的定义,浊度是由于不溶性物质的存在而引起液体的透明度降低的一种量度[17]。不溶性物质是指悬浮于水中的固体颗粒物(泥沙、腐殖质、浮游藻类等)和胶体颗粒物。水的浊度反映了水的光学性质,表示水中悬浮物和胶体物对光线透过时所产生的阻碍程度。浊度的大小不仅与水中悬浮物和腔体物的含量有关,而且与这些物质的颗粒大小、形状和表面对光的反射、散射等性能有关。据资料显示[18],本项目施工海域水体浊度与深度分布情况如表3所示。由表3数据可知,施工地点海水的浊度随深度的增加而急剧恶化。
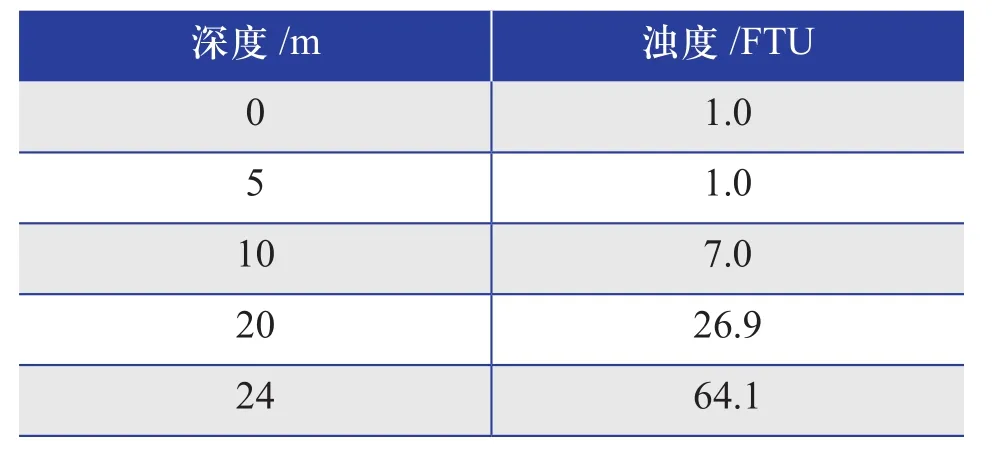
表3 本项目施工海域水体浊度与深度对照表[18]
可见光中,由于海水对蓝绿波段的可见光吸收损耗极小,因此蓝绿光通过海水时,不仅穿透能力强,而且方向性极好,所以,选择以蓝绿光为依据,研究浊度对于可见光的影响。查阅相关资料可知[19],在13.23 FTU下,蓝绿光的衰减系数为4.33 m-1(即传输长度为1/4.33 m),而施工水深的浊度超过64.1 FTU,其衰减系数倍增。由此可见,其他可见光在海水中面临比蓝绿光更加严重的衰减。因此,进行水下监控时,需要感光度较低的摄像头,同时需配备照明设备。
综上所述,能够兼容低感光镜头、高照度照明系统的水下机器人较适用于本项目。表1中的SEA WOLF 5、Seaeye FALCON、Seaeye lynx及Sea Maxx均符合此项要求。
3.3 数据通信
本项目需对基础下沉及水下连接进行连续、实时的监测,相应的通信手段不仅要有足够的传输速度,还需在水下环境保证数据的有效性和稳定性。现有水下通信主要分为有线通信与无线通信两种[20],其中无线通信又包括光波通信、电波通信和水声通信。
光波通信是以光作为载体传输信号,因此其对水体清澈度要求较高。本项目位于东海海域,水体较为浑浊,透光性较差,故光波通信不易实施。
电波在水中传输时能量衰减较为严重[21],且衰减随频率的增加而加大,无法适用项目工况。
水声通信是无线通信领域中最为复杂的一种方法,以声波作为载体传输信号。相比前两种通信方式,水声通信的优点在于衰减较低;但声波传播受海洋波浪起伏、海水介质的非均匀性影响,易产生散射、折射效应,导致信号缺失[22],稳定性较差。此外,水声通信数据传输速度也无法满足本项目要求,现有技术手段在理想环境下只能达到20 kbps,但项目所需监控摄像码率至少要在400 kbps以上,难以有效实施。
相比于无线通信,有线通信成本低廉且安全可靠,使用脐带缆直接与水下机器人相连,是目前常用的通信手段,其活动范围主要受限于脐带缆的长度,而现有的脐带缆技术可达到的最大深度为2743 m[23]。本项目施工作业水深约40 m,且对水下机器人活动范围的要求不高,因此有线通信技术更为适合。表1中列举的水下机器人均符合使用要求。
3.4 电力传输
从电力传输方式进行分类,水下机器人分为有缆型与无缆型。无缆型可减少缆绳对机器人的束缚,提升活动范围和自由度,但现有的储电技术水平导致机器人个体庞大,岸上配件较多。而有缆型机器人由电缆连接,在满足数据传输要求的前提下,可将电缆整合至脐带缆中。尽管脐带缆效应会影响机器人水下动作[24],同时需要搭配成套的脐带缆回收系统(包括导向机构、牵引绞车、储存绞车等[25]),但如前文所述,本项目施工作业水深约40 m,且对水下机器人活动范围要求不高,因此,有缆电力传输方式更为适合。表1中列举的水下机器人均符合使用要求。
3.5 有无机械手
就目前设想的拖航与安装流程而言,在驳船就位及其与基础系固过程中,可以使用观测级水下机器人;在筋腱安装环节,采用水下机器人可大幅简化安装装置与工艺要求。事实上,根据本文研究团队以往的经验,可不采用水下机器人,也可仅采用观测级水下机器人,当然也可采用作业级水下机器人,整体方案的选择除了考虑安装设备与工艺,以及机器人本身的技术条件外,也要综合考虑项目成本等各方面的因素。但无疑的是,采用水下机器人,可降低工装与工艺的要求、复杂度和安装成本。
3.6 综合分析
本文对水下机器人的论证分析,旨在为项目的实施提供思考。事实上,除了上述功能需求外,水下机器人对密封性、抗压性等同样存在功能指标点的考虑。而从本项目水深约40 m的环境来看,表1中所列水下机器人在密封与抗压方面均能满足要求,故不再赘述。
由此,基于项目拖航安装工况及海洋环境情况,对比分析水下机器人需求与现有技术,逐项分解指标,在不同的功能参数选项上,分别有不同的水下机器人产品满足要求,具体情况如表4所示。综合考虑后,Fugro公司的Seaeye FALCON和Seaeye lynx两款水下机器人满足主要功能指标;观测级首推Seaeye lynx,而作业级首推Seaeye FALCON。

表4 水下机器人需求与现有技术对比分析表
Seaeye lynx观测级水下机器人,拥有高性能推进器,为“水平4个、垂直2个”分布,满足位姿调整要求;推进器产生的水平推力为2.6 kN、垂直推力为1.3 kN,性能足以抗海流冲击;水下配备了3个摄像头,其中1个为低感光镜头,同时配备可调光LED(即其照明能力可调整以适应水下环境),水下摄像功能搭配可旋转云台,增加了机器人在水下的视野范围;使用无浮力脐带缆,配备了一套完整的投放回收系统,拥有良好的拓展性能;整体为框架式结构,元器件大部分位于耐压壳体中,壳体由聚丙烯与不锈钢构成,质量轻且耐压性、密封性较好。
必须注意的是,Seaeye lynx水下机器人不支持拓展机械手臂,同时该型号水下机器人重200 kg,比其他型号更重,薄弱环节部分(如推进器与框架的连接部分)的密封性尚待考虑。但其性能在观测级水下机器人中已属翘楚,因此,如果本项目首推观测级,则Seaeye lynx较为适合。
4 总结
目前风电技术正逐渐转向深远海域寻求发展的空间,风机基础从固定式变为漂浮式,水下连接装备、工艺与方法需要新的手段。尤其针对漂浮式基础的水下安装,需要水下机器人的视觉辅助,甚至机器人作业辅助。本文基于正在开展的上海市深远海域漂浮式风电示范工程项目,结合风电安装海域水体与气候条件,以及基础水下安装作业需求,从位姿控制、水下监控、数据通信、电路传输和有无机械手5个角度,论证分析了现有水下机器人的技术选型依据和方法,为项目的具体实施提供了技术储备。
水下机器人的监测功能可大幅提高水下安装定位精度,并简化纠错方式,减少预制定位结构复杂程度,对项目的有效开展具有很大的帮助;而水下机器人的辅助作业功能同样可以在一定程度上简化安装流程。但整体方案的选择除了考虑安装设备与工艺,以及机器人本身技术条件之外,也要综合考虑项目成本等各方面的因素。
[1]马继安, 维维.ROV在深海工程中的应用[J].海洋与海岸带开发, 1989 , (1): 77-78.
[2]茅及愚.“海沟号”潜入万米海底[J].机器人技术与应用,1996, (2): 24-25.
[3]王雷, 陈世海, 汪有军, 等.从马航MH370事件看救捞系统深远海搜寻和打捞能力建设[A].第八届中国国际救捞论坛[C].中国上海, 2014: 148-151.
[4]王去伪.潜水器在海洋水下作业中的应用[J].海洋科学,1989, (4): 71-72.
[5]任平.我国“探索者号”机器人研制成功[J].教师博览,1995, (6): 43.
[6]佚名.6000米水下机器人从太平洋凯旋归来[J].机器人技术与应用, 1997, (6): 25.
[7]程风.“北极ARV”遥控水下机器人[J].共产党员月刊,2009, (1): 53.
[8]谭民, 王硕.机器人技术研究进展[J].自动化学报, 2013, (7):963-972.
[9]PATIRIS I.ROV, Remote Operated Vehicle [D].Helsinki:Helsinki Metropolia University of Applied Sciences, 2015.
[10]赵羿羽.有缆遥控水下机器人发展简介[J].船舶物资与市场, 2017, (4): 39-42.
[11]封锡盛.从有缆遥控水下机器人到自治水下机器人[J].中国工程科学, 2000, (12): 29-33.
[12]Youtube.TLP installation [EB/OL].https://www.youtube.com/watch?v=cgn-7vc_gjs r f, 2013-11-28.
[13]Youtube.Full story of Hywind Scotland–world’s first fl oating wind farm[EB/OL].https://www.youtube.com/watch?v=P UlfvXaISvc & t=200s, 2017-10-17.
[14]国家海洋局东海分局.2016年东海区海洋环境公报[R].国家海洋局东海分局, 2017.
[15]范士波.深海作业型ROV水动力试验及运动控制技术研究[D].上海: 上海交通大学, 2013.
[16]张相闻, 王磊, 李振江, 等.锚泊辅助动力定位推进器布置方式分析[J].实验室研究与探索, 2013, (10): 7-10, 72.
[17]伍培.水浊度的现代定义、表达和测定[J].重庆石油高等专科学校学报, 1995, (1): 51-53.
[18]翟世奎, 张怀静, 范德江, 等.长江口及其邻近海域悬浮物浓度和浊度的对应关系[J].环境科学学报, 2005, (5): 693-699.
[19]丁琨, 黄有为, 金伟其, 等.水下蓝绿激光传输的衰减系数与水体浊度关系的实验研究[J].红外技术, 2013, (8): 467-471.
[20]王毅凡, 周密, 宋志慧.水下无线通信技术发展研究[J].通信技术, 2014, (6): 589-594.
[21]冯振兴.基于CDMA的水下传感器网络MAC协议设计[D].西宁: 青海师范大学, 2014.
[22]贾宁, 黄建纯.水声通信技术综述[J].物理, 2014, (10):650-657.
[23]郭宏, 屈衍, 李博, 等.国内外脐带缆技术研究现状及在我国的应用展望[J].中国海上油气, 2012, (1): 74-78.
[24]FANG M C, HOU C S, LUO J H.On the motions of the underwater remotely operated vehicle with the umbilical cable effect [J].Ocean engineering, 2007, 34 (8): 1275-1289.
[25]陈育喜, 张竺英.深海ROV脐带缆绞车设计研究[J].机械设计与制造, 2010, (4): 39-41.
