基于CarSim与Simulink车辆防抱死系统仿真分析
2018-06-28姜宏霞刘垚均张涵
姜宏霞 刘垚均 张涵
上汽通用五菱汽车股份有限公司 广西柳州市 545007
1 引言
汽车防抱死系统(简称ABS),是通过传感器检测车轮每一瞬时运动状态,自动控制制动力的大小,防止车辆出现抱死现象,保证车辆与地面处于最大的附着力,尤其是车辆处于不同摩擦系数路面,ABS系统可以明显的维持方向盘稳定性和缩短制动距离,有效提高行车安全。
由于ABS系统应用日趋广泛,且只能通过主观评价去测评ABS对整车的性能影响,调试周期长,效率低,故对ABS控制模块的研究及其在整车紧急制动仿真工况中的模拟尤为重要。
2 汽车防抱死系统结构及控制策略
2.1 ABS系统结构组成
ABS系统主要由传感器、电子控制装置和执行器三个部分组成。其系统原理结构图如图1所示,车速传感器分别安装前后四个车轮上,当ABS启动工作时,ECU接收车轮轮速信息,各个车轮的制动压力 通过ECU根据各个车轮的速度来控制,车轮液压控制单元接受控制信号对车轮分泵的压力进行调节。
2.2 ABS工作原理
ABS的工作原理是依靠车速传感器和轮速传感器检测车速和轮速状态,并由电子控制单元计算出实际的车辆滑移率,再通过电磁阀增减制动器的制动力,来控制汽车在车轮紧急制动过程中的实际运动状态,从而使车轮始终保持在最佳的紧急制动状态下,获得最佳制动效果[1]。
2.3 ABS控制策略
在制动主缸/轮缸压力和车速/轮速控制模块中写入ABS的PID控制策略,其策略是以紧急制动时轮胎所期望达到的滑移率为控制目标,通过轮速与车速传感器收集汽车车速、转速信号,同时计算出各车轮轮胎滑移率,并与期望目标滑移率进行比较分析,计算出二者的偏差,并将其输入量输入给PID控制器,在控制的过程中不断的调整PID各个参数值,从而使得制动力大小、实际滑移率也相应改变,反复调节控制参数,最终使实际滑移率处于最佳滑移率附近[2],使汽车在最佳滑移率所对应的地面制动力下进行制动。
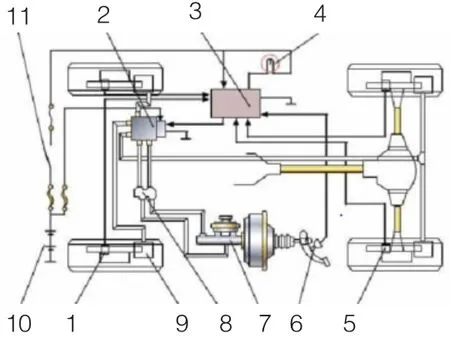
图1 ABS系统结构图
3 建立基于CarSim与Simulink联合仿真模型
3.1 建立CarSim整车模型,
建立的CarSim整车模型如下图2所示。
3.2 建立CarSim与Simulink联合仿真的模型
3.2.1 创建紧急制动仿真工况
参数设置按照以下步骤进行:
(1)速度控制
输入初始速度65km/h。
(2)制动控制
输入时间与制动压力的关系曲线,设置0.2s后紧急制动。
(3)路面轨迹
选择对开路面,选择Ground and Roads->Road:3D Surface(All Properties)->straight ->split mu。
(4)仿真时间
输入仿真开始0s和结束时间10s。
(5)建立结果输出变量
添加输出变量:侧向加速度、转向盘转角、横摆角速度、车速、车身侧倾角、轮速等。
3.2.2 建立CarSim与Simulink的导入导出变量
(1)创建CarSim导入变量
定义CarSim导入变量:IMP_PBK_L1、IMP_PBK_R1、IMP_PBK_L2、IMP_PBK_R2,其参数分别为四个车轮的轮缸压力Mpa。
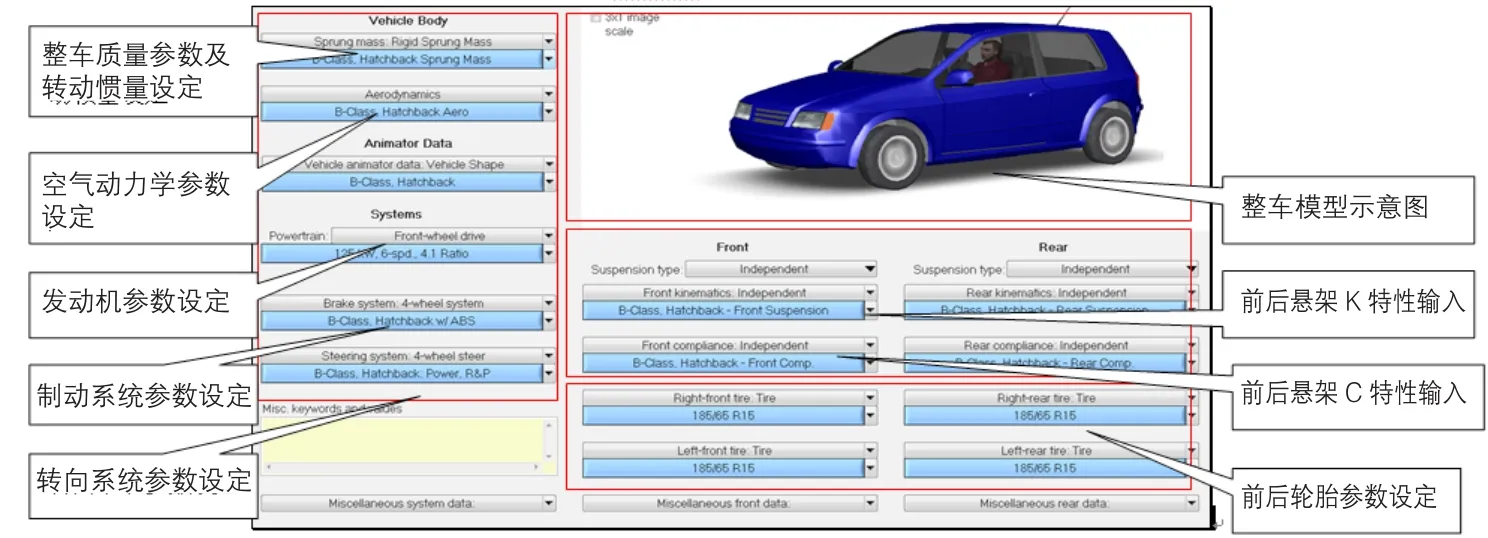
图2 CarSim整车模型
(2)创建CarSim导出变量
定义CarSim的导出变量:Vx_L1、Vx_R1、Vx_L2、Vx_R2、 Vx_SM、Pbk_Con其参数分别为四个车轮轮速km/h,汽车质心处的速度km/h、 主缸压力的控制输入MPa。
3.3 运行CarSim与Simulink联合仿真模型
在制动主缸及轮缸压力控制模块和车速及轮速控制模块中对ABS控制策略进行修改并运行,如图3所示。
4 仿真结果分析
在针对车辆防抱死制动系统测试的双路面紧急制动测试工况下,对于有无ABS控制进行仿真,仿真结果如图4、图5所示,通过对比分析可以明显的看出,加入ABS后,使车辆具有很好的稳定性能,无ABS,车辆横摆角变化特别大,很容易造车车辆侧翻。
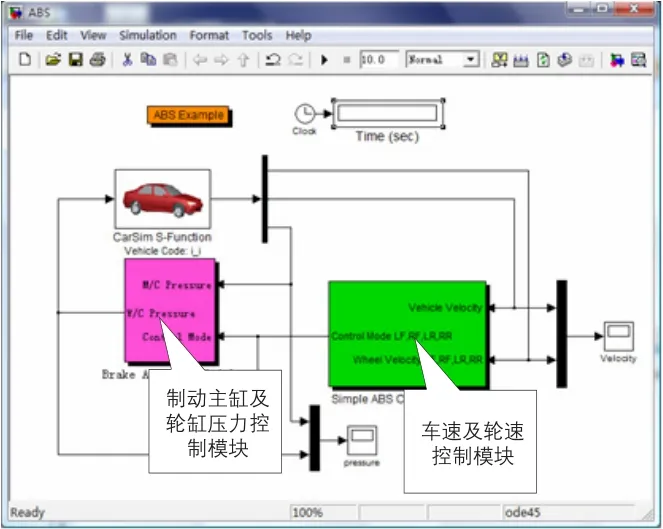
图3 CarSim与Simulink联合仿真的ABS控制模型
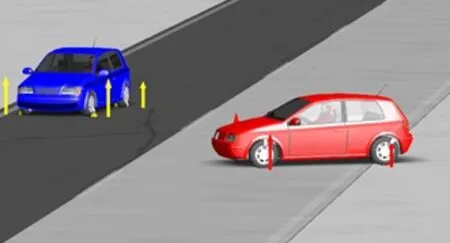
图4 有ABS和无ABS时车辆的制动情景
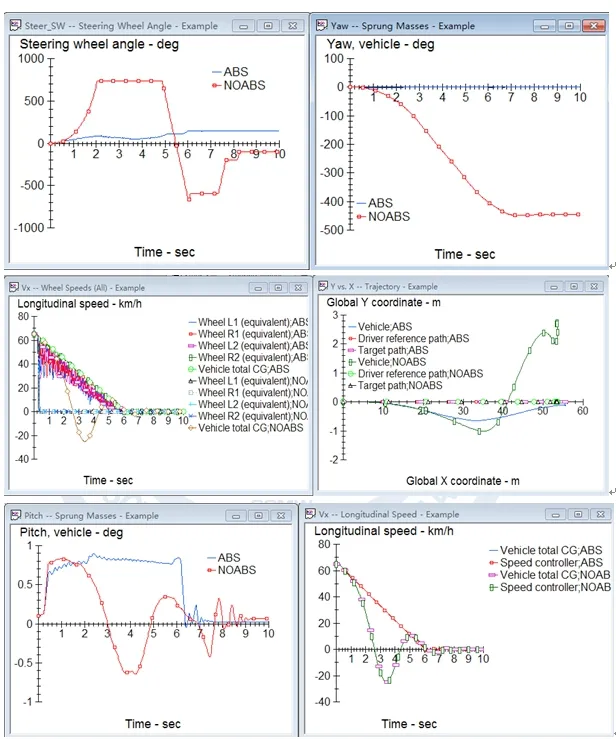
图5 有无ABS部分曲线图
5 结语
在本文中,主要是介绍关于ABS的控制算法的研究,在CarSim中建立Simulink接口,并在Simulink中利用由CarSim导入带有自定义的输入输出汽车模型,进行ABS算法搭建,在基于某乘用车车体,悬架KC特性,轮胎等等模块的基础上搭建相应的控制算法,并比较在双路面紧急制动霞有无ABS控制的汽车运行情况,为产品开发调试阶段提供有力的理论依据,大大缩短产品开发周期,减少试验成本。