双螺杆压缩机转子反向设计及动力学仿真研究
2018-06-22郭高锦
郭高锦
(豪顿华工程有限公司,北京 100031)
1 双螺杆压缩机转子反向设计
在反向设计时,相关转子mesh线以及型线方程要通过相匹配的坐标系进行表述。阴转子、阳转子以及mesh线坐标系,如图1所示。
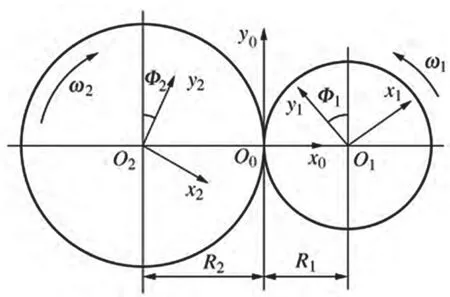
图1 反向设计坐标系
mesh线坐标系O0x0y0的中心处在转子节圆的切点区域,O1x1y1即滞留在阳转子的动坐标系,O2x2y2也就是滞留在阴转子的动坐标系[1]。Z轴方向都要依附于转子的基本轴向,从转子的传动关系能够计算出:

式中,i为传动比;n为转速;R为转子节圆半径;θ为转子的转角;ω为角速度。下标1和阳转子有关,下标2和阴转子有关。
上述坐标系间的变换计算如下。
阳转子动态坐标系O1x1y1与啮合线坐标系O0x0y0间变换:

阴转子动态坐标系O2x2y2与啮合线坐标系O0x0y0间变换:

阴转子动态坐标系O2x2y2与阳转子动态坐标系O1x1y1间变换:)

在反向设计过程中,啮合线的区间曲线通过设计人员提前定义,已知方程,令某区间曲线的方程为:

而未知阳转子型线方程x1和y1能够通过式(3)与式(4)予以表示:

依附于压缩机工作状态下双螺杆间mesh特性,两极的转子处于mesh区域,其速度具有一定的制衡性,方向和mesh区间的公切线方向相统一,即速度方向以及法线方向全部是一致的[2]。在此基础上,人们可以得出:n·v=0。
将式(8)代回至式(7),能够计算出阳转子型线方程,在此基础上匹配于坐标转换,即式(4)、式(6)、式(8)就能够得出阴转子型线方程。

反向设计需提前定义匹配于要求的啮合线,经以上公式计算出相对应的阴阳转子型线方程。若想合理设计啮合线,那么啮合线一定要达到基本条件[3]。
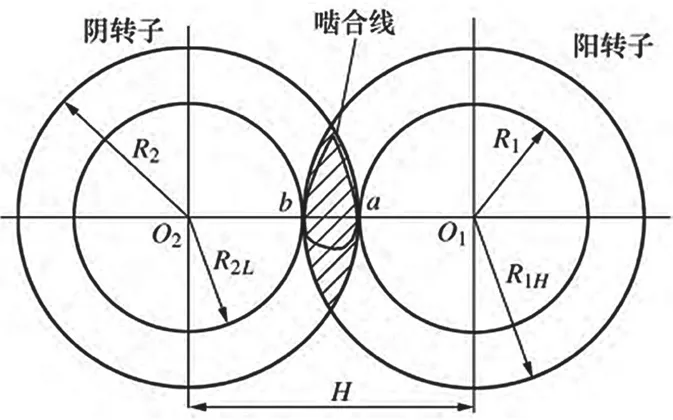
图2 阴阳转子啮合范围
遵循双螺杆压缩机运动的基本形式,只在阴阳转子mesh的区间出现接触线,空间接触线体现于边缘平面,即为mesh。因此,mesh必须处于阴阳转子mesh区间,图2阴影中,a、b两点是转子的齿顶圆和其他转子的齿根圆相交点,全部在转子的连线上,阴影范围内就是阳转子齿顶圆与阴转子节圆相交所形成的区间。
a、b两点是两个转齿的至高点与低谷,a、b间距是转子齿高。所以,反向设计的啮合线一定要经过a、b两点。因为对式(8)分母的基本需求,啮合线不存在和X轴相重叠的曲线段,换而言之,除了a、b两点,啮合线上不会出现y0=0。接触线把高、低压腔予以隔离,需要具有连续性。依附于啮合线和接触线间的联系,啮合线一定是连续且闭合的曲线。
2 双螺杆压缩机反向设计转子型线流体研究
计算流体动力学是在设计过程中用于分析双螺杆压缩机性能的主要方式。在仿真过程中,双螺杆压缩机流体模型内,螺杆啮合区域范围会持续发生改变,网格会重新生成,所以择取非结构化网格划分双螺杆压缩机流体模型,在此基础上通过弹簧振子模型控制网格。若流场无显著变化,即可把网格相关节点通过弹簧进行关联,若网格具有显著改变时,节点间的力要根据弹簧理论进行计算。在流场明显变化的状态下,人们可以通过区域重组模型对出现变化的流场予以重新划分。
目前,SRM型线已被广泛应用于转子型线中,其流线型优异。研究表明,高压端相关齿间的压强按轴向以进气口作为基点,在此基础上传输到排气端,此过程为递增关系,各转子间具备明显的分界,高压及低压气体分离,处于接触线两端。而反向设计转子型线在排气口的气体压强大于0.7MPa,与SRM型线转子在排气口区域最高气体压强值近似,超过98.1%。
3 试验结果
选用科莱特半导体产品有限公司的XTL-193-190(M)传感器,其具有超高的分辨率,精度可超过0.61%,频率为720Hz,额定工作压力超过3MPa,超过试验最高压力0.9MPa,在零下55~200℃都能够稳定运行。
试验结果表明,实测的参数和仿真数据无显著差异,不过实际和仿真参数间具有一定的压力差,而且会存在压力波动的情况。这是由于转子在制造过程中的误差和安装时出现的误差有关,它直接造成双螺杆压缩机在工作状态下中高压气体发生泄漏。因此,在有效区间中仿真结果是正确的,由此可以证明,反向设计转子的性能和SRM型线转子的性能基本一致。
[1]张宇昕,卢涛,江波,等.高聚合物在双螺杆挤出机中预热融化过程的数值模拟[J].机械工程学报,2015,(4):42-43.
[2]唐斌,刘广彬,杨启超,等.小型LNG装置混合制冷剂螺杆压缩机工作过程模拟[J].流体机械,2016,(11):105-106.
[3]周巍,栾慎勇,董素霞,等.天然气螺杆压缩机组的设计计算[J].流体机械,2007,(10):44-45.
