焊接机器人技术研究与应用现状探讨
2018-06-22费存华
费存华
(广州数控设备有限公司,广州 510530)
对于焊接机器人技术而言,在实际使用的过程中,其可通过自动化的焊接方式,替代传统的人工焊接,以保证焊接产品的质量和外观的一致性。我国在汽车工业方面与大型管道方面,已经开始大量应用焊接机器人技术,并形成高生产效率的发展模式,可降低人工劳动强度。焊接机器人技术的应用,能够保证产品质量,并在科学的管理下,提升生产效率。
1 焊接机器人国内外现状与趋势分析
1.1 国内外的状况
1959年,美国发明了第一台工业机器人,促进了工业机器人的应用。当前,工业机器人受到广泛关注与重视,其中,焊接机器人可以划分为三个阶段。
1.1.1 示教与再现类型的机器人
当前,此类机器人已经广泛应用在焊接生产中,并且机器人只需要工作人员编辑程序,为机器人提供相应焊接电流、电压、焊丝直径等数据,就可以使得机器人进行再现焊接,并达到理想的效果。但是,此类机器人无法获取外部反馈数据信息,不利于提升应变能力,无法合理地适应外界环境变化情况。
1.1.2 感知类型的机器人
感知类型的机器人中添加了传感技术(电弧传感器,激光传感器等),对于外界环境具备一定的感知能力,能够获取与处理信息数据,针对获取的信息进行轨迹控制,在传感器技术使用期间,还可以结合离线编程技术对其进行辅助处理,能够进一步降低编程的工作量,提升工作效率,并在积极设计与创新的过程中,提升整体表现的效果。
1.1.3 智能类型的机器人
此类机器人能够对外部环境进行感知、记忆和学习,能够对其进行自主编程,并且拥有逻辑思维与判断能力,能够进行决策。在任何焊接环境中,机器人都能提升自身的适应能力。但是,我国在机器人人工智能技术方面还处于探索阶段。
1.2 发展趋势分析
在未来实际应用中,焊接机器人具备良好的发展前景,从技术的发展方向来看,焊接机器人与其他工业机器人一样,会逐步将通用化、智能化、柔性化作为主要的发展方向。
1.2.1 智能化趋势分析
焊接机器人在焊接期间会面临复杂的流程,主要涉及电流电压与热变形方面的问题,受到各类因素的影响,难以创建数学模型。因此,需针对现实情况进行智能化分析,明确信息容量特点与计算特点等,创建焊接机器人的智能化系统,在合理分析与研究的情况下,更好地进行处理[1]。
1.2.2 多学科交叉融合的趋势分析
对于焊接机器人而言,在实际发展的过程中,会融入微电子技术与计算机技术,将软件系统与硬件系统融入其中,有利于提升整体处理效果。在实际发展的过程中,可将PC控制器作为主要依据,建设现代化的焊接机器人系统,能够将声音识别系统、图像处理系统等有效整合,更好地开展设计工作[2]。
1.2.3 多设备协调工作技术的趋势分析
焊接机器人焊接产品的过程中,有时并不能独自完成任务,通过先进的调控技术,明确具体的方向与目标,与变位机机构或者其他焊接机器人合作。如图1所示,焊接机器人与变位机协同工作站,二者可创建系统通信,其间需要协调好机器人与变位机的配合,保证二者能够更好地完成工作,使其可以满足焊接复杂工件的需求[3]。
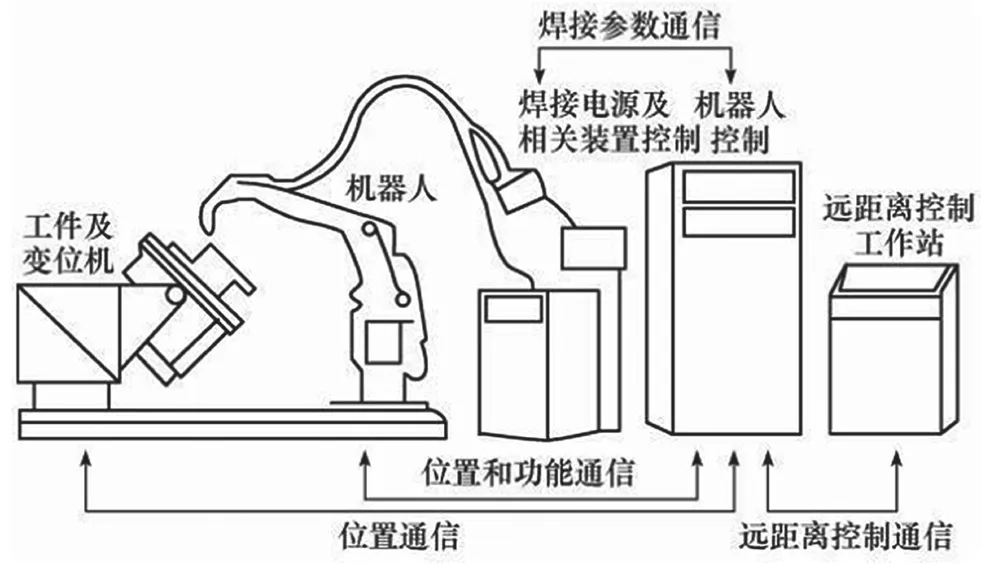
图1 焊接机器人与变位机协同工作站
1.2.4 个性化与网络化的趋势分析
在焊接机器人技术实际创新与研发期间,需合理使用控制系统,筛选最佳的传感技术方式,并在虚拟机技术的支持下,创建个性化的模式,提升整体技术的使用效果,确保在新时期发展中提升焊接机器人技术的应用水平,为其后续发展奠定基础[4]。
2 焊接机器人焊接工艺的研究现状分析
焊接机器人对焊缝进行焊接,与焊工操作流程不会完全相同,主要因为在人工焊接期间,可以听到焊接电弧声音,能够感知电弧反冲力情况,观察熔池流动状态,根据反馈信息的情况,更好地进行焊接状态的判断。焊工可以利用自身的工作经验,对工艺参数进行调节,如电弧长度参数、焊接电流、电压参数等,在试焊的过程中,可改进工艺提升整体焊接质量,保证符合规定。
目前,在焊接机器人实际使用的过程中,能够呈现良好的模式,并且在接头与焊缝处理的过程中,能够明确外界环境的实际情况,创建科学的调整机制,并利用科学方式开展熔透状态的调整工作,确保在新时期发展中明确经验参数,创建科学的调整体系。在机器人技术应用的过程中,虽然可以针对焊缝进行合理的焊接处理,但是工作期间不能更好地应变,缺乏经验参数,无法针对焊接内容与工艺要求进行严格的控制。因此,在实际研究的过程中,主要针对焊接机器人可靠性与有效性情况进行分析,了解具体替代的人工内容与特点,在合理分析的情况下,更好地研究细节问题,开展焊接机器人的研究与分析工作[5]。
部分学者已经针对焊接机器人的应用情况进行研究,针对传统熔化焊接方式与活性气体保护焊接方式等进行分析,明确电弧焊的实际特点与情况。焊接期间,会出现焊接电流增大的现象,因此,需开展焊接热输入分析工作,明确残余应力特点与焊接变形情况,并在研究的过程中更好地进行分析与协调,确保可以满足当前的实际发展需求。
在实际运行的过程中,焊接机器人需明确具体的焊接特点与要求,了解焊枪自动摆动与停留特点,并在实际分析与研究的过程中了解自动化技术情况,创建自动化技术的应用模式,保证在实际分析期间总结丰富经验,并针对具体内容进行严格的分析与协调。为了更好地开展焊接机器人技术的研发与创新工作,我国已经开始创建科学化与现代化的焊接机器人技术研发机制,并在科学研究中形成良好的分析体系,从而提升整体技术的分析与研发效果[6]。
3 结语
焊接机器人的应用将会越来越普遍,虽然目前还存在的一些问题,但是随着科技的进步,它们会逐渐得到解决。鉴于焊接机器人在未来的制造与加工业中的地位越来越重要,人们应该重视和发展该技术,关注国外的先进技术,通过引进、消化和提升从而走在前列。
[1]杨立山,张昊,王驰.工业焊接机器人技术的发展分析[J].科技风,2017,(5):17.
[2]王月.焊接机器人技术发展现状与趋势[J].商品与质量,2016,(32):144.
[3]张元良,顾俊.焊接机器人技术研究现状与发展趋势探索[J].才智,2017,(26):252-253.
[4]刘超超.浅析焊接机器人技术及发展方向[J].山东工业技术,2016,(16):2.
[5]莫明朝.焊接智能化与智能化焊接机器人技术研究[J].中国科技纵横,2017,(9):81-82.
[6]张坚.焊接机器人技术现状与发展趋势分析[J].建筑工程技术与设计,2017,(31):2312.
