劳作型下肢外骨骼动力学分析与控制
2018-06-22曹宇飞
曹宇飞 樊 军
(新疆大学 机械工程学院,乌鲁木齐 830047)
目前,外骨骼机器人在农业领域的研究和应用很少。因此,本文设计出一种可以减轻农民工作强度与节省体力的劳作型下肢外骨骼机构,通过对其自由度与二连杆模型运动学分析,采用PD控制策略检验了系统稳定性。最后,在一定约束条件下,对其运动空间进行分析仿真,结果证明,该机构具有良好的稳定性。
1 机构模型的建立
本文设计了一种劳作型下肢外骨骼机构,具有易穿戴、运动灵活的特点。模型及模型简化图如图1所示。
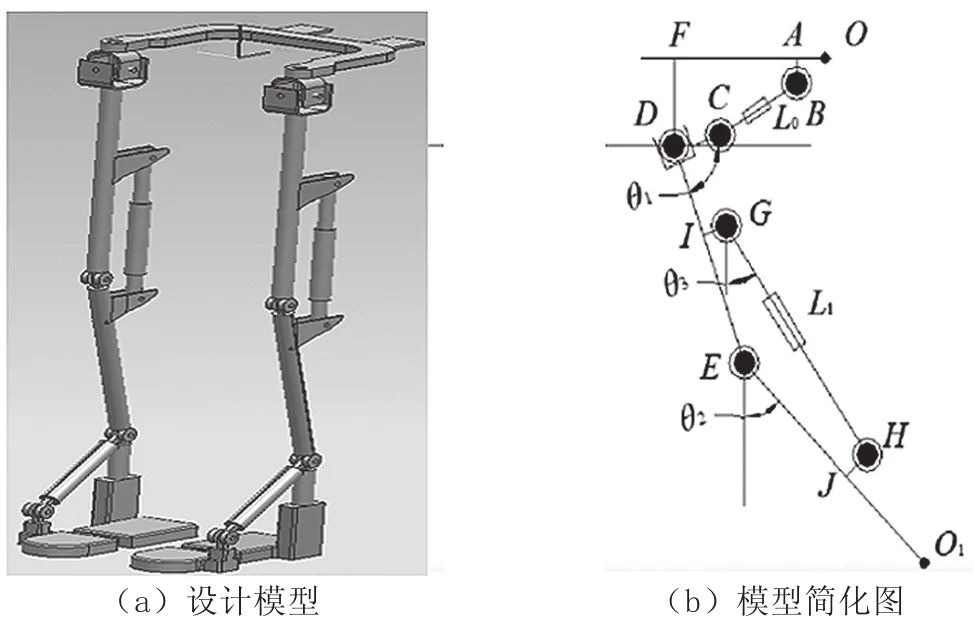
图1 劳作型下肢外骨骼机构设计模型与简化图
自由度修正公式如式(1)所示。

式中,F为机构自由度;d为机构阶数;n为机构个数;g为运动副的数目;fi为第i个运动副的相对自由度。
此外,骨骼机构有8个自由度,有的在X、Y平面内可自由移动,为移动副;有的绕Z轴可自由转动,为转功副[1]。
2 下肢外骨骼二连杆建模
在人体实际运动过程中,腿的运动是对称的,因此只需建立单腿的动力学模型[2]。本文采用Lagrange法进行动力学建模,首先定义Lagrange函数为:
L=Ek-Ep(2)
式中,Ek为系统动能;Ep为系统势能。
由式(2)进一步可以得到:

系统在髋、膝关节处进行主动驱动,即有两个主动自由度,即髋、膝关节。因此,可将下肢简化为二连杆机构,模型如图2所示。以站立相为初始位置,qh、qk:膝、髋关节的角度,(Xc,h,yc,h)、(Xc,k,yc,k):大、小腿杆的质心。
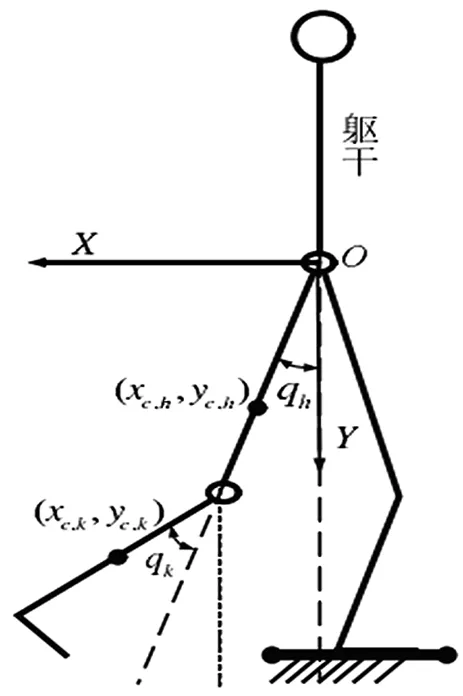
图2 外骨骼二连杆模型
根据模型,可以得到质心到关节旋转中心的距离为:

那么杆件质心的速度为:

膝关节与髋关节的角度与关节角速度为:
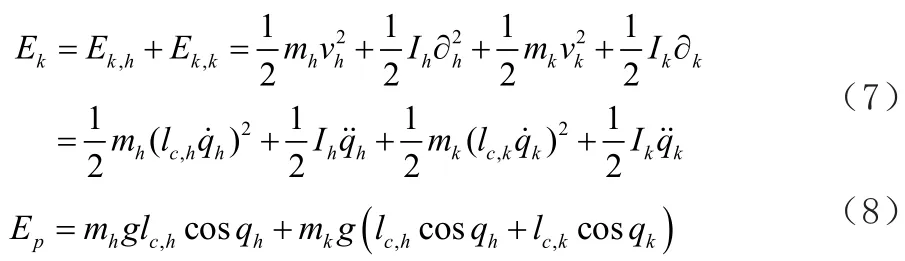
系统动能与势能可表示为:
基于式(3),得到下肢运动时的动力学方程,其可以表示为:

综上可以得到人体运动时腿部的关节运动轨迹。
3 PD控制策略
下肢外骨骼控制过程是控制器发出命令,控制驱动系统动作,驱使外骨骼运动,从而实现人机协调。同时考虑力、力矩以及大腿杆与小腿杆间作用时,为了使下肢外骨骼的末端能够实时跟随一个确定的预测位置,并到达这个位置,采用PD控制策略,可以满足控制要求[3]。根据所建的二连杆模型,在有重力因素、忽略外部影响时,控制系统的输入为:)

T由于采用固定点控制,因此预判关节角度qd为常数,可得=≡0,设重力矩能够实现准确估计,即(q) = G(q),此时动力学方程变为:

应用李雅普诺夫稳定性定理]证明此系统的稳定性,如式(12)、式(13)所示[4]。

PID半负定,Kd正定,得到当VPID≡0 时,e˙≡0,得出˙e˙≡0,Kpe=0,由于Kp具有可逆性,求得e=0。根据拉萨尔不变性定理可得,(e,e˙)=(0,0)为受控外骨骼全局渐进稳定的一个平衡点,即取任何初值(q0,q˙0),都会得到q→qd,q˙→0的结果[5]。
4 工作空间分析
外骨骼的工作空间是人体运动时可操作的活动区域。并联机构的工作空间指其末端执行器的执行工作范围[6]。
4.1 影响工作空间的主要因素
杆长限制条件:Lmin≤Li≤Lmax;关节角限制条件:θzmin≤θzi≤θzmax;转动副转角约束条件:θimin≤θzi≤θimax。
4.2 建立工作空间的面积函数
机构的工作空间面积是一个随着连杆长度Li、转动副转角θ2和θ3、关节角θ1、并联杆安装位置a、b(a为AF之间的距离,b为DI之间的距离)等机构参数变化而改变的不规则形状。工作空间的面积S如式(14)所示。

选取机构参数优化的目标函数:
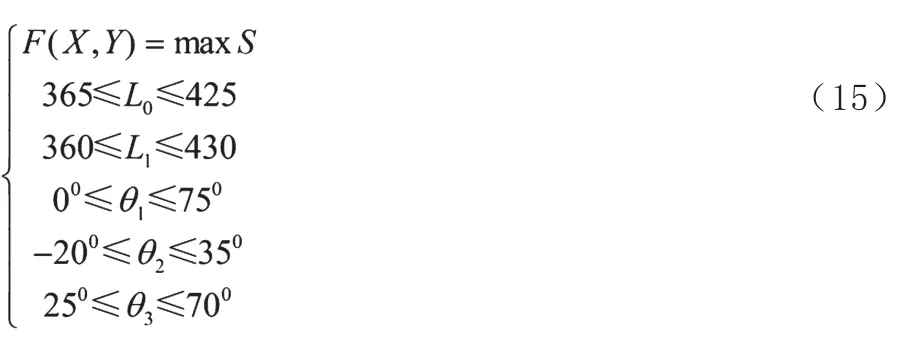
已知 AB=IG=HJ=75mm,AF=a,OF=400mm,CD=38mm,DI=b,DE=40mm,EO1=43mm, 且 0< a≤ 150,0< b< 350,L20=(XC-AB)2+(YC-AB)2。
由式(15)得到的具体参数,通过算法优化后利用MATLAB软件计算出工作空间最大面积为9576.22mm2,且a=194.43mm,b=402.32mm。此时,机构的运动空间在工作区域上更大程度上接近人体下肢正常步态运动区域,同时也避免了运动中奇异位置的出现。
5 模拟仿真
设置两组起点和终点为(-400,-240)、(-40,-480)与(-400,-560)、(-40,-240),且末端起始速度及加速度设定为已知值,使机器人运动末端由起始点直线运动到终点。通过MATLAB仿真,得到两组各个关节运动角和电动机长度数值变化图,如图3~图6所示。表1为人体行走时下肢各关节的标准运动范围。

表1 人体下肢各关节的标准运动范围
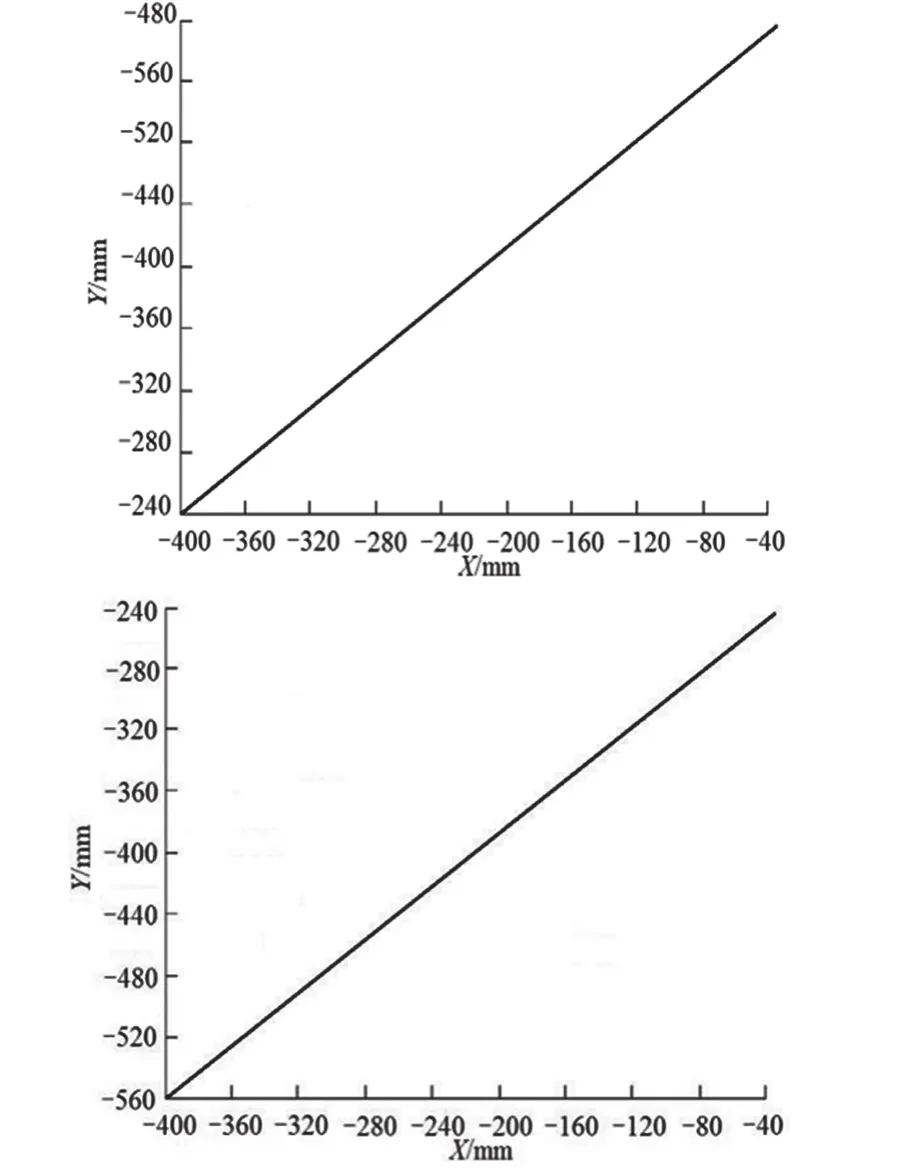
图3 两组机器人末端运动轨迹
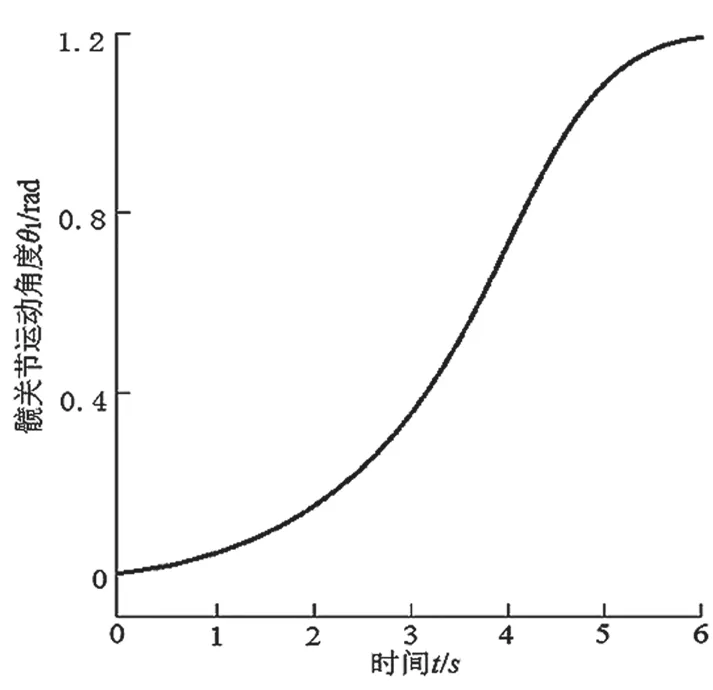
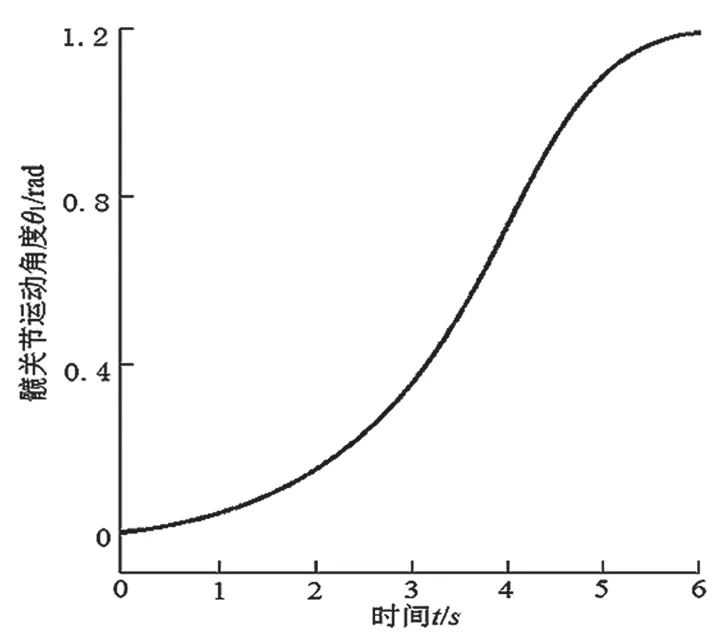
图4 两组髋关节运动角θ1变化值
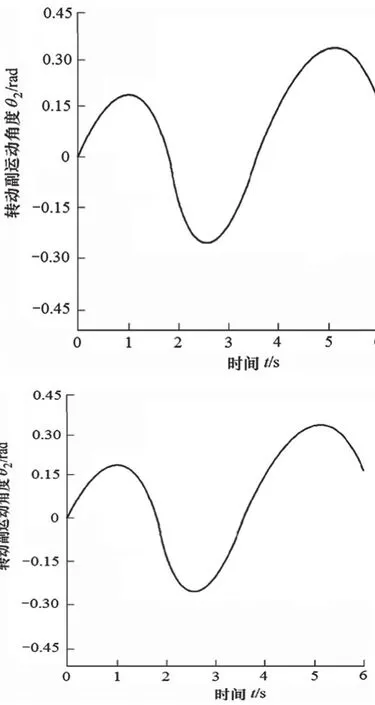
图5 两组膝关节运动角θ2变化值
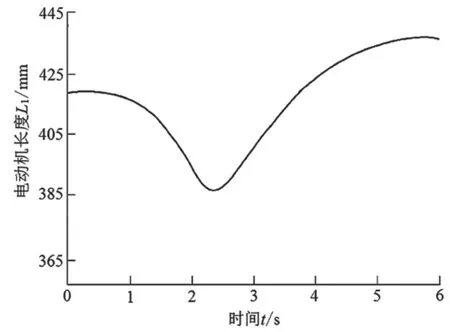
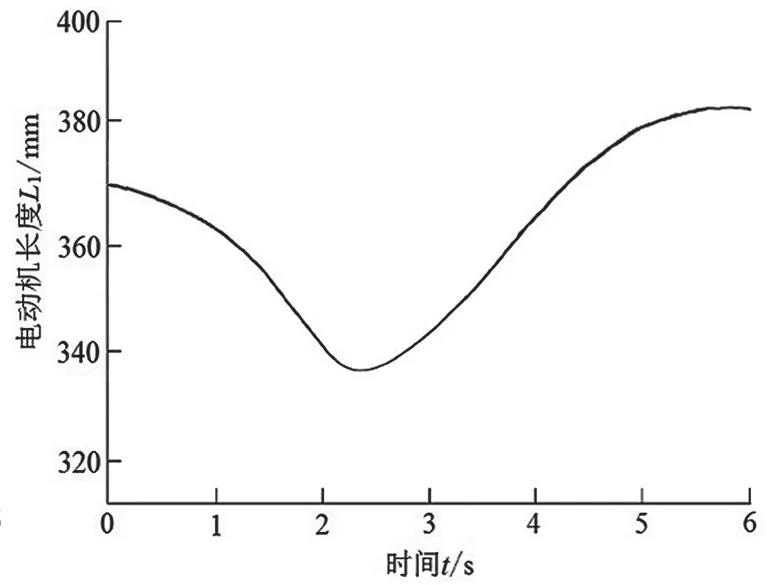
图6 两组电动机推杆长度L1变化值
由图3~图6可知,人体关节角、运动副转角、电机推杆长度都在运动限制范围之内,所以本文设计的劳作型下肢外骨骼机构符合设计要求。
6 结论
本文设计了一种劳作型下肢外骨骼机构,对其二连杆模型进行运动学分析之后,通过PD控制系统稳定性。最后,在一定约束条件下,笔者对其运动空间进行分析仿真,证明该机构具有良好的稳定性。利用此设计与控制方案,可以使机构的末端执行器按照设定的运动轨迹进行作业劳动,保证机构的稳定性。
[1]张辉,王永兴,王生泽,等.六自由度外骨骼式康复机械臂机构设计[J].机械设计与研究,2014,30(2):26-29.
[2]田浩,余跃庆.柔顺并联机器人动力学及轨迹跟踪[J].机械工程学报,2016,52(13):38-46.
[3]闭业宾,陈伟,曾军.基于PD扭曲滑模CPS阻尼力自适应非线性控制[J].控制工程,2017,24(4):781-786.
[4]刘云平,李渝,陈城,等.基于李雅普诺夫指数的非完整约束系统稳定性[J].华中科技大学学报(自然科学版),2016,44(12):98-101.
[5]李健昌,韦笃取,张波.基于拉萨尔不变集定理控制同步磁阻电动机的混沌振荡[J].微特电机,2013,41(4):5-6.
[6]陈伟海,徐颖俊.并联式下肢康复外骨骼运动学及工作空间分析[J].机械工程学报,2015,51(13):158-166.
