风电机组塔筒连接螺栓检修机器人结构设计
2018-06-22崔家平李赢正吴若虞肖东硕马铁强
崔家平,李赢正 ,杨 洁,吴若虞,肖东硕,马铁强
(1.沈阳工业大学 电气工程学院,辽宁 沈阳 110870;2.沈阳工业大学 新能源研究院,辽宁 沈阳 110870;3.沈阳工业大学 机械工程学院,辽宁 沈阳 110870)
0 前言
随着清洁能源的迅速发展,风力发电在我国所有发电方式中占比越来越大,截止2016年,中国风电机组总装机容量已达到1.69亿千瓦,风力发电已成为我国第三大类型电源。预计到2020年底,风电机组累计并网装机容量将达到2.1亿千瓦以上。而随着近年来我国装机规模不断扩大,风电机组设备的检测维修问题也愈显突出。
关于维修成本方面,根据欧洲风能协会的统计,陆地风电机组每千瓦时发电量的运行维护费用占总生产成本的20%~25%,对于海上风电场,其运行维护费用高达35%;关于运行安全方面,长期工作在野外的暴晒和雷雨等恶劣环境中的风电机组,其连接件损坏率高达40%~50%,一旦其关键连接件发生扭断,会使设备损坏、机组停机,严重者造成机组崩塌,带来巨大的经济损失。由此可知风电机组设备的检测与维修是一个亟待优化的问题。
近年,在风电机组连接件的检测维修理论发展中,重庆大学[1]用法兰连接有限元模拟方法对轮毂主轴法兰连接螺栓进行建模分析,得到了各工况下螺栓的应力结果,并对比分析了螺栓组的危险截面应力,对危险螺栓处的法兰连接进行了安全校核;许昌许继风电科技有限公司[2]针对MW级风机变桨轴承连接螺栓的强度问题,采用周期性建模的方式建立了螺栓的有限元分析模型,并基于GL规范计算了螺栓的极限强度及疲劳强度;太原理工大学[3]基于Schmidtand-Neuper非线性理论,分析了法兰螺栓连接系统的受载关系,并推导了在叶根法兰中心弯矩作用下的螺栓工作应力和法兰中心弯矩之间的关系。以上研究对风电机组连接件的检修理论分析做出多项贡献。
然而,在具体风电机组连接件检修方法中,仍旧依靠工人攀爬风机定检维修连接件。在此过程中存在许多问题,首先由于人力检修存在不准确性,操作中可能产生疏忽和错漏,二是人力维修耗时长、效率低,三是因为风电机组过高,工人检修具有较大风险与困难。人力检修的弊端问题至今还未得到有效解决。
本文介绍一款自主研发的风电机组塔筒螺栓检修机器人,以期其能应用在风电机组塔筒连接螺栓的维修领域,减少人力检修带来的不便因素。
1 机器人方案设计
本文介绍的机器人主体由上下近似对称的两部分组成,每一部分由三块功能各异的矩形板构成。为了实现机器人在塔筒内壁法兰处固定,根据三点固定原理设计了W型加紧结构,该结构在此范围弧度内可实现无障碍运动,并设计了滑块与圆弧齿条相结合的前进(交替移动)机构;为了实现力矩扳手在矩形板上适时升降,根据升降机原理,设计了夹持(固定扳手)机构;为了适应在不同曲率的工况,根据曲柄滑块机构工作原理,设计了机器人的自适应机构,机械功能如图1所示。
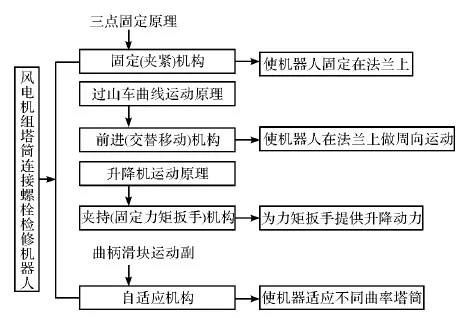
图1 机器人各部分机械功能
2 机器人结构设计
2.1 固定(夹紧)机构设计
在风电机组塔筒中,由于可供固定的支撑只有塔筒壁、法兰和塔筒螺栓,可用支撑点较少且形状不规则,利用三点固定原理,借助塔筒壁和塔筒法兰两个支撑,设计出了W型夹紧结构。其中W型的左臂和右臂为弹簧滑杆加滚轮结构,此结构可保证在夹紧状态时滚轮时刻与塔筒壁接触且弹簧处于被压缩状态,即左臂和右臂与塔筒壁在夹紧状态时与塔筒壁有较大的力的作用。W型的中心处在夹紧状态时与塔筒螺栓处接触。在夹紧状态时,螺栓对W型中心处的力的方向与塔筒壁对左右臂滚轮的力大小相等,方向相反,则夹紧机构将机器人固定在法兰上。
如图2a所示,L形直角臂和滑动直杆组成了W型夹紧结构。图2b为夹紧状态,图2c为松开状态。当处于夹紧状态时,滚轮与塔筒壁接触,两个L形直角臂交汇处与塔筒螺栓接触,以此达到固定的作用。背景为风电机组的塔筒壁及其与之相连接的法兰。
在此结构中提供动力的是12电机,其通过带有棘轮机构的齿轮将动力传递到齿条上,齿条前后运动控制W型开口张角的大小,使得1滚轮接触塔筒壁或离开塔筒。的作用是当L形直角臂处于夹紧状态时卡住,以便电机通过棘轮机构向其他机构输送动力而固定机构仍处于夹紧状态。

图2 夹紧机构
2.2 前进(交替移动)机构设计
由于绝大部分风电机组塔筒内部为圆形,为了使得机器人能在圆周环境中进行工作,根据过山车可以在一定范围内的弧度上无障碍运动以及过山车与轨道的固定方式,设计了本机器人的前进机构。本机器人的滑块相当于过山车的本体,圆弧齿条相当于过山车的轨道,限位滑轮相当于过山车的车轮,由此可使滑块与圆弧齿条做沿圆弧齿条的相对运动且不发生其它方向的无关运动。
如图3所示,前进机构由五个零部件组成。其中滑块主体与机器人上半部分结构相固定,圆弧齿条与机器人下半部分固定。滑块主体与滑轮共同构成了完整的一个滑块,其中滑轮包括上下限位滑轮和左右限位滑轮。电机通过电机支架与滑块主体连接,电机轴端配合一个齿轮,齿轮与圆弧齿条相啮合,该齿轮不但可以传递转矩使机器人上下两部分交替移动,同时还起到了左右限位的作用。
假使机器人下半部分固定在塔筒法兰处,上半部分保持松开的状态,此时电机转动,则机器人上半部分将会相对下半部分发生相对前移,反之,下半部分将会发生前移。上下交替前移,实现机器人周向运动。

图3 前进机构
2.3 夹持(固定扳手)机构设计
由于现在市场上已经有较为成熟的力矩扳手,所以只设计了可以搭载力矩扳手的夹持机构,并且根据升降机的原理,设计出了可以升降力矩扳手的夹持机构,以便于力矩扳手可以在适时的场合进行升降。在力矩扳手运行到螺栓正上方时,电动推杆收缩将扳手准确套在螺母上,紧固作业完成后,电动推杆升高,将力矩扳手抬起,进行下一步作业。
如图4所示,夹持机构由电动推杆和夹具两个零部件组成,电动推杆为提供升力的动力来源,夹具的作用为夹持力矩扳手,当把力矩扳手放置好以后,上紧夹具的螺栓。当到达塔筒螺栓上方位置时,电动推杆将夹具连带力矩扳手一起放置到螺母上,进行检修作业。

图4 夹持机构
2.4 自适应(适应不同曲率塔筒)机构设计
由于不同容量的风电机组的塔筒直径不同,且同一塔筒的直径也是按照一定比例进行变化的,所以为了适应不同曲率的塔筒,根据三点固定原理原理设计了本机器人的自适应机构。机器人上半部分(下半部分)由三块主板构成,其中两侧主板分别与中间主板相连且主板两侧边形成一定角度,角度不同,则适应的曲率也不同,而自适应机构则是用来调节这两侧边的角度且将这一角度固定在某一值保持不变。
如图5所示,自适应机构由曲柄和滑块两个零部件组成,曲柄和滑块共同组成了曲柄滑块机构,其中曲柄与中间的矩形板相连接,滑块与两侧的矩形板相连接。当曲柄与滑块的相对位置发生变化时,两块矩形板间的角度便也随之发生变化,以达到机器人适应不同曲率下的风电机组塔筒。

图5 自适应机构
2.5 整体结构概述及其运动学分析
如图6所示,机器人由四个固定(夹紧)机构,一个前进(交替移动)机构,一个夹持(固定力矩扳手)机构和四个自适应机构组成。
图2a中的电机提供四个夹紧机构的动力。电机在正转时给机器人左上半部分提供动力并通过大齿轮传递动力至右上部分(即机器人上半部分都接受到了动力)。当W型夹紧机构到达规定区域内,电动推杆起作用将其卡住,这时,电机便可以进行反转。反转时,则通过图3中的万向节联轴器给机器人下半部分提供动力,达到的效果与正转时相同。
其次,自适应机构与固定在各个主板上的大齿轮能同时作用互不影响,由图6a可知,大齿轮的分度圆在各个主板连接处相切,一定角度范围内,两侧矩形板可以和中间矩形板调整其间的夹角以适应不同曲率的塔筒内壁。
如图3所示,换向机构通过滑块与机器人上半部分连接,圆弧齿条与机器人下半部分连接,固定在滑块上的主动轮提供转矩,使机器人上下两部分的交替前移,实现机器人在塔筒法兰上周向运动。
通过以上四个机构之间的相互配合可实现机器人在塔筒法兰上对螺栓自动检修的功能。
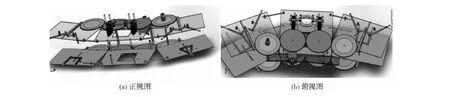
图6 风电机组塔筒连接螺栓检修机器人
3 总结
本文介绍一款自主设计沿塔筒法兰周向运动检测并自动拧紧螺栓的机器人,用以检修塔筒连接螺栓。该方法不同于人力检修,采用全自动化机器人,自主沿法兰周向运动,定位螺栓,固定机体并通过电动力矩扳手检测螺栓的拧紧程度,对其进行拧紧。避免人为操作的高危险性,不准确性,降低劳动力成本,提高了作业效率,作业精度和检测维修的自动化程度。
在国内还没有将机器人运用于风电机组检测维修领域的实例,本文对促进国内风电机组检修过程的自动化发展具有一定的参考价值。
[1] 高培昱. 风力发电变桨连接螺栓故障诊断和可靠性分析[D].太原理工大学,2017.
[2] 董姝言,杨扬,齐涛,苏凤宇,晁贯良,何海 建.基于周期对称模型的MW级风电机组变桨轴承连接螺栓强度计算[J].机电工程,2017,34(04):357-360.
[3] 龚国伟. 风电机组法兰螺栓连接建模与仿真技术研究[D].重庆大学,2014.
[4] Jeon M, Kim B G, Hong D. Maintenance robot for wind power blade cleaning[J]. Gerontechnology, 2012, 11(02).
[5] 王忠锋,余泉.风电机组高强螺栓试验与安装技术总结[J].风能,2018(01):78-82.
[6] 高培昱. 风力发电变桨连接螺栓故障诊断和可靠性分析[D].太原:太原理工大学,2017.
[7] 朱少辉.风电机组塔筒设计和优化[J].机械工程与自动化,2016(06):115-117.
[8] 周舟,杨理诚,梁勇,等.大型风力机基础法兰高强度螺栓断裂失效分析[J].太阳能学报,2016,37(09):2230-2235.
[9] 庞渊.风电机组典型事故及预防措施分析[J].中国高新技术企业,2015(29):123-125.
[10] 王娜,高文英,陈璐.兆瓦级风电机组塔筒法兰螺栓连接强度计算实例[J].科技展望,2015,25(12):91.
[11] 李晓松. 大型风力发电机组塔筒载荷特性分析[D].沈阳:沈阳工业大学,2015.
[12] 王淼,徐占,姚亮,等.风电机组塔架高强度螺栓的质量控制研究[J].风能,2014(01):104-107.
[13] 史文超. 风电机组塔架高强螺栓应用中存在问题的分析[A].中国农机工业协会风能设备分会《风能产业》(2013年第9期)[C].,2013(09).
[14] 时代儒. 分析风电机组整机倒塌与安装因果关系[A].中国农业机械工业协会风能设备分会2012年度论文集(上)[C].:中国农业机械工业协会风力机械分会,2012(03).
[15] 牛兴海. 风电机组中关键零部件的疲劳分析及应用[D].重庆:重庆大学,2012.