压浪板对两栖车辆水动力特性影响的数值分析
2018-06-20,,,,
, , , ,
(1.中国特种飞行器研究所,湖北 荆门 448035;2.江麓机电集团有限公司,湖南 湘潭 411100;3.西递安科软件技术(上海)有限公司,上海 200120)
随着大功率推进装置在两栖车辆上的应用,提高和改善两栖车辆的水动力性能已成为各国研究的重点[1-3]。两栖车辆与一般舰船的运动方式相似,但与舰船的黏性绕流场相比,两栖车辆的流线型较差,方形系数较高。两栖车辆周围绕流场存在大量的分离,再加上自由液面的影响,导致水动力特性数值计算难度增加[4]。目前应用的试验方法基本上参照船舶设计中的拖模试验方法,虽然该方法可靠性强,但是成本高、周期长。随着计算机硬件与计算流体动力学(CFD)的迅猛发展,使得采用数值计算方法研究两栖车辆周围的黏性绕流场成为可能[5-6]。近年来,国内外一些研究者采用数值计算方法对两栖车辆的绕流场及重叠网格进行了数值模拟[7-9],但没有考虑空气的影响。空气阻力在两栖车辆受到的总阻力中所占比例较小,简化后的模型假设流体在自由液面上是不可穿越的,即不考虑车辆的兴波和喷溅。这种假设会使总阻力计算值随着航速的提高误差不断增大[10-12],因此有必要对两栖车辆带自由液面黏性绕流场的数值计算进行深入研究。本文基于计算流体动力学理论,建立两栖车辆带自由液面黏性绕流场的数学模型。采用Realizablek-ε两方程湍流模型、流体体积(VOF)法及重叠网格法对两栖车辆绕流场进行三维瞬态数值计算,得到绕流场、阻力、纵倾与升沉。在此基础上,对两栖车辆外形提出优化方案,计算分析两栖车辆改型前后的水动力特性及流场。
1 静水阻力数值预报方法
1.1 研究对象
本文以两栖车辆(见图1)为研究对象,对车体尾部加装压浪板的两栖车辆进行水动力性能分析,并优选出最佳性能的车型。本文所选取的速度为两栖车辆的设计航速25 km·h-1,雷诺数为2.7×107,长度弗劳德数为1.108。在进行水动力计算时,采用实车尺寸进行仿真。由于两栖车辆是左右对称的,因此采用实车的一半进行计算。本文仅对阻力、纵倾、升沉等3个自由度进行研究。

图1 两栖车辆尾部示意图Fig.1 Afterbody of amphibious vehicle
1.2 控制方程
两栖车辆的自由液面绕流是两相流动问题,自由液面即为水和空气的交界面。由于速度较低,空气可作为不可压缩流体处理。自由液面的捕捉采用VOF法,VOF法是一种固定欧拉网格下的表面跟踪方法,用于构造和捕捉自由液面的数值计算。该方法可以处理具有空气和流体交界面的稳态和瞬态等问题。在VOF法中,不同流体组共用一套动量方程,计算时在全流场的每个计算单元内,记录下各流体组分所占体积。本文使用的湍流模型为Realizablek-ε两方程湍流模型。该模型已经有效地应用于各种类型的流动模拟,包括边界层流动和管内流动,比RNG(Renormalization group)k-ε两方程模型有更广泛的适用性。Realizablek-ε两方程湍流模型不仅适用于充分发展的湍流,也适用于近壁区内的流动以及Re数较低的流动。
1.3 网格处理方法
区域离散的实质就是用有限个离散点来代替原来的连续空间,即生成计算网格。可以采用2种网格对两栖车辆进行计算:整体网格和重叠网格。如图2所示,采用整体网格进行计算时,由于车体姿态变化显著,容易发生自由液面移动出网格加密区的情况,因此计算精度大幅降低。

图2 整体网格不同时刻的网格变化Fig.2 Gridding variation of global grid in different times
从图2可以看出,在初始姿态下,自由液面位于网格加密区内,可取得良好的自由液面捕捉效果。计算过程中,车体发生大幅度的纵倾与升沉变化,计算区域随车体整体移动,使得针对自由液面的网格加密区与自由液面不能实现良好的位置匹配,导致对自由液面的捕捉精度大幅降低,如图3所示。从图3的兴波图像上看,计算所得自由液面出现了“凹凸不平”的现象,这主要是由于姿态的变化使得自由液面移动出了网格加密区,导致网格与自由液面不匹配。
要使计算域发生纵倾与升沉后自由液面仍然能够落在加密区内,就必须增加自由液面加密区的高度。加密区高度的增加导致网格大幅增加,极大地影响了计算效率。为了保持一定的计算效率,在划分网格时采用重叠网格。结合扰流情况,把计算区域划分为2个区域,分别为内区域(车体附近)和外区域(离车体较远),如图4所示。由于流场情况比较复杂,因此对车体及行走机构周围所在的内区域采用适应性很强的非结构网格进行离散;对远离车体的流场外区域采用结构网格(六面体)进行较疏离散,以减小网格数量。2个区域之间采用重叠网格技术进行流动参数插值,从而保证模型发生大幅运动时自由液面的加密网格不发生移动。从图4可以看出,对重叠区域附近的网格加密,而且背景网格加密区域较大,这主要是考虑到背景网格加密区域要覆盖整个重叠区域运动时所能到达的极限位置。另外,由于车体姿态变化显著,因此需要较大的背景加密区域,以保证计算精度。在一次初始姿态修正后,计算所得自由面十分“光滑”,所得结果更加可靠。
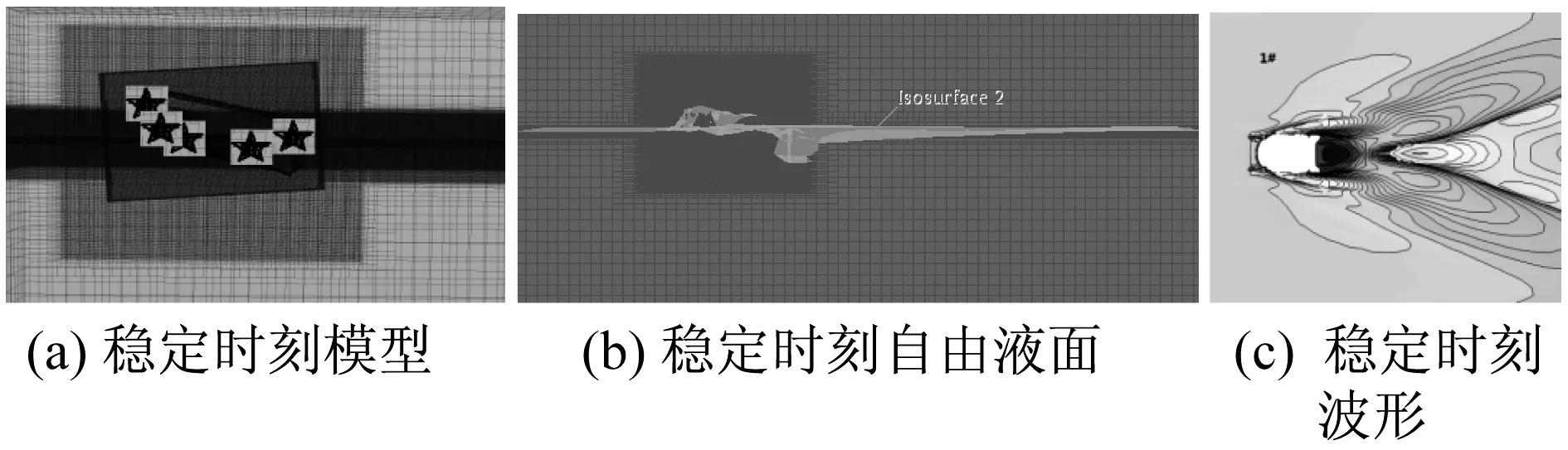
图4 重叠网格及运动效果Fig.4 Overset mesh and moving effect
2 计算结果及分析
2.1 网格无关性验证
网格划分是一个比较关键的环节,计算网格的质量对结果的稳定性、准确性、收敛性以及计算效率和计算精度影响很大。由于计算时将连续域离散化,网格节点的密度及分布就会影响流体的性质,因此应根据流场中各物理量的分布特点对计算域进行合理地网格划分,尤其是对一些关键部位。
计算网格需满足以下基本要求:①计算域的尺寸与常规的水动力计算尺寸保持一致;②模型在航向上有200个左右网格,应不低于100个,局部特征较小处网格加密;③车身姿态角较大,采用重叠网格;④在自由液面附近进行网格加密,自由液面Z方向的网格加密区域有2个,在自由液面上下两侧是对称关系,第一层加密高度是0.1 m,第二层加密高度是0.2 m;⑤自由液面加密处X、Y、Z向尺寸分别为Z=L/1 000,X=Y=50Z,其中L为车身长度;⑥网格质量必须满足面网格变化率≥1、体网格变化率≤1的要求。计算网格在满足以上要求时,选用2种网格进行计算,如表1所示。本文计算结果是按某比例缩放的数据,非原始数据。

表1 不同网格的计算结果Tab.1 Numerical results in different griddings
一般来说,网格节点数越多,计算精度越好。从表1的计算结果可以看出,2种网格的计算结果相差不大。为了提高计算效率,采用220万网格进行计算,如图5所示。

图5 200万网格Fig.5 2 000 thousand gridding
2.2 压浪板对车体绕流的影响
两栖车辆是同时具有陆地和水上行驶性能的车辆,兼顾到陆地和水上的使用环境,结构外形不能像船一样做成流线形。端面形状变化较剧烈的车体首部导致两栖车辆在水中行驶时阻力较大,兴波严重,尤其高速时车体首部上水会造成埋首等问题,严重时车辆不能前进。通过数值计算,分析加装压浪板前后3种车型在航速为25 km·h-1时的流场特性。表2所示为设计航速下三自由度运动仿真结果。
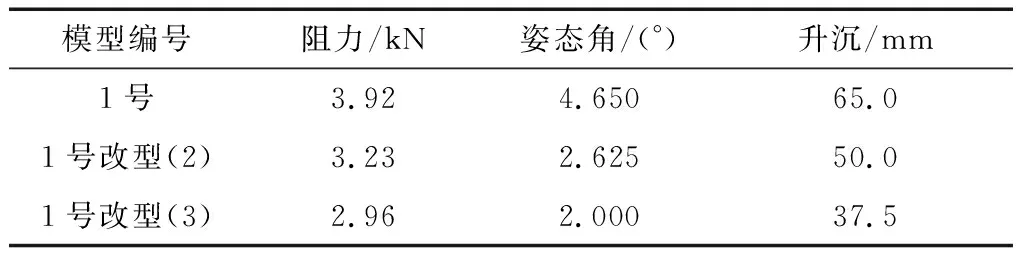
表2 25 km·h-1航速时的计算结果Tab.2 Numerical results at the speed of 25 km·h-1
从计算结果可以看出,1号改型(3)阻力最小,并且姿态角最小。在航速25 km·h-1时,改型车辆总阻力分别减小17.6%、24.6%,可使改型车辆在相同功率下水上航速显著提高。
图6和图7是加装压浪板前后车体周围流场及对称面。模型在两栖车辆尾部产生空气涡旋,方尾下端低于弦侧水面,水流向后形成一个凹槽,出现明渠流中的“水跃”现象,这与高速艇的尾流情况一致。气水两相之间有掺混,车体尾部后方水面下降,车辆陷入由自身运动形成的盆状空间内,整体车辆尚未因滑行而完全托出水面。同时可以看出,加装压浪板对车体周围绕流有较大影响,并且加装压浪板后两栖车辆姿态角明显降低。
车体尾部形状的急剧变化引起突然去流,形成了很大涡旋,涡旋的存在势必造成车体尾部压力的骤降。压差阻力占两栖车辆总阻力的绝大部分,因此有必要对车体和流场的压力分布进行分析。由于3种模型的车体压力分布及周围流场压力、速度分布情况基本相同,因此本文仅给出1号改型(2)相应的计算结果。从图8车体压力云图可以看到,车体首部产生的压力较大,车体尾部位产生的压力较小,这就形成了压差阻力,阻碍车辆的前进。

图6 流场Fig.6 Flow field

图7 对称面Fig.7 Plane of symmetry

图8 压力云图Fig.8 Pressure diagram
3 结论
(1)加装压浪板的两栖车辆水上性能更优。通过数值计算分析了某型两栖车辆黏性绕流场的关键信息,结果表明加装压浪板的两栖车辆流场特性得到了较大改善,有效降低了航行总阻力。
(2)采用重叠网格法和VOF法,可计算两栖车辆在一定航速下稳定行驶时的航态和水动力特性。数值计算中考虑了兴波的影响,捕捉到的自由液面波形与实际情况相符。由于考虑了兴波阻力,保证了车体航行时总阻力的计算精度。
(3)计算两栖车辆水动力特性时,车体绕流场区域采取分区混合网格划分方案。该方案不仅减少了网格总数,还保证了足够的计算精度。设置网格参数时,从内到外的网格尺寸比例不要超过1∶4。
参考文献:
[1] 崔金一,赵又群,阮米庆.过渡型两栖车辆造型设计及水上性能数值分析[J].中国机械工程,2011,22(8):989-993.
CUI Jinyi,ZHAO Youqun,RUAN Miqing.Transitional amphibious vehicle shape-designing and numerical analysis of its water performance[J].China Mechanical Engineering,2011,22(8):989-993.
[2] 余祖耀,廖远才,李锦云,等.滑板角度组合对两栖车辆升阻比影响的仿真研究[J].船舶工程,2015(3):26-29.
YU Zuyao,LIAO Yuancai,LI Jinyun,et al.Simulation analysis of effect of different skateboard angles on lift-drag ratio of amphibious vehicle[J].Ship Engineering,2015(3):26-29.
[3] 黄劲,余志毅,刘朝勋,等.基于CFD的两栖车辆水动力导数的计算方法[J].车辆与动力技术,2014(2):39-43.
HUANG Jin,YU Zhiyi,LIU Zhaoxun,et al.Numerical method for hydrodynamic coefficient of an amphibious vehicle based on CFD[J].Vehicle & Power Technology,2014(2):39-43.
[4] 程龙.履带式两栖车辆绕流场的数值计算[J].装备制造技术,2015(7):9-18.
CHENG Long.Numerical simulation of flow around crawler-type amphibious vehicle [J].Equipment Manufacturing Technology,2015(7):9-18.
[5] 毛明,汪建兵.防浪板对排水型两栖车辆水动力学的影响研究 [J].兵工学报,2016,37(9):1553-1560.
MAO Ming,WANG Jianbing.Research on influence of breakwater on hydrodynamic characteristics of displacement amphibious vehicles[J].Acta Armamentarh,2016,37(9):1553-1560.
[6] 彭锟,刘影.尾翼板对轮式两栖车辆航行阻力特性影响的研究 [J].车辆与动力技术,2014(4):15-19.
PENG Kun,LIU Ying.Influence of empennage on resistance characteristics of a wheeled amphibious vehicle[J].Vehicle & Power Technology,2014(4):15-19.
[7] 李莉,王宪成,韩束,等.2栖装甲车辆兴波阻力的计算及流场分析 [J].兵工学报,2010,31(8):1102-1105.
LI Li,WANG Xiancheng,HAN Shu,et al.Calculation of wave-making resistance and analysis of flow field for amphibious armored vehicles[J].Acta Armamentarh,2010,31(8):1102-1105.
[8] 王丽丽,李新颖,黄淼,等.基于重叠网格的水陆2栖飞机浮筒水动性能研究[M].北京:海洋出版社,2017.
WANG Lili,LI Xinying,HUANG Miao,et al.Hydrodynamics research of amphibious aircraft float based on overset mesh[M].Beijing:Ocean Press,2017.
[9] 孙伟,韩建礼,刘西侠.基于动网格模型的两栖车辆数值模拟[J].舰船科学技术,2009,31(1):146-150.
SUN Wei,HAN Jianli,LIU Xixia.Numerical simulation of amphibious vehicle based on the dynamic mesh model[J].Ship Science and Technology,2009,31(1):146-150.
[10] 唐锐.2栖装甲车辆模拟器水动力学研究[D].哈尔滨:哈尔滨工业大学,2011.
TANG Rui.Research on hydrodynamics of amphibious armored vehicle for simulator[D].Harbin:Harbin Institute of Technology,2011.
[11] 王涛,郭齐胜,徐国英,等.基于CFD的两栖车辆水上耐波性能研究初探[J].系统仿真学报,2009,21(10):3142-3145.
WANG Tao,GUO Qisheng,XU Guoying,et al.Preliminary study on seakeeping capacity of sailing amphibious vehicle based on CFD[J].Journal of System Simulation,2009,21(10):3142-3145.
[12] 高富东,姜乐华,潘存云.基于计算流体动力学的两栖车辆水动力特性数值计算[J].机械工程学报,2009,45(5):134-139.
GAO Fudong,JIANG Lehua,PAN Cunyun.Numerical calculation on hydrodynamic characteristics for the amphibious vehicle based on computational fluid dynamics[J].Journal of Mechanical Engineering,2009,45(5):134-139.
