基于联合直方图的自适应粒子滤波跟踪算法
2018-06-20刘少林朱文球孙文静王业祥
刘少林,朱文球,孙文静,王业祥
(1.湖南工业大学 计算机学院,湖南 株洲 412007;2.智能信息感知及处理技术湖南省重点实验室,湖南 株洲 412007)
0 引 言
实时的运动目标跟踪算法一直是当今计算机视觉与图像处理领域中的一个热门研究领域,在日常生活以及科学研究中具有广泛的应用[1-2]。目标在图像中的描述在目标跟踪中至关重要,通常采用的特征包括灰度、颜色、边缘和LBP纹理等[3]。
1993年由Gordon等[4]等提出了一种基于贝叶斯理论的粒子滤波算法,但将其引入计算机视觉领域进行运动目标跟踪却是在1998年由Isard M等提出[5-6]。由于粒子滤波跟踪算法在处理非线性、非高斯问题时的独特优势,因此在目标跟踪领域受到了更多研究者的重视。但是,它的缺陷也是很明显的,即只有当粒子数量足够时,加权粒子才能更好地模拟后验概率分布,因此计算量十分大,无法保证算法的实时性,这使得它无法在目标跟踪中得到广泛的应用。为了解决粒子滤波计算量庞大的问题,近年来涌现出很多解决方法。其中,最常见的是将粒子滤波算法与快速收敛的mean shift算法[7]相结合的Kernel粒子滤波[8]。基于上述分析,文中提出一种基于颜色纹理联合直方图的自适应粒子滤波跟踪算法。
1 基础理论
1.1 颜色直方图模型
颜色直方图[9-10]是一种全局特征,由于其计算简便、处理速度快、对目标尺度、旋转部分遮挡不敏感等优点而受到广泛应用。
假设被跟踪的目标是中心为y0,窗宽为h的矩形。文献[5]将目标在图像中的大小以及每一个像素点在矩形中所处的位置对直方图构建的影响体现在算法中,依据像素点在矩形中的位置分配不同的权值,位置离目标中心的距离越小其权值越大,权值函数为:
(1)
其中,r为像素点位置到矩形中心的距离。
目标的加权颜色直方图为:
(2)
其中,Ch为归一化系数。
(3)
1.2 LBP纹理直方图模型
局部二值模式[11](local binary pattern,LBP)是一种用来描述图像局部纹理特征的算子,具有灰度和旋转不变性且计算复杂度低等优点。
原始的LBP算子定义在3×3的窗口内,对比窗口中心像素与相邻的8个像素的灰度值,若周围像素值大于中心像素值,则该像素点赋值为1,反之为0,从而得到一串二进制串,作为该像素点的LBP纹理特征值。计算公式如下:
(4)
其中,P为邻域像素的数目;R为中心像素xi与邻域像素的距离;gc为对应图像块中心的灰度;gp表示以yc为圆心,半径为R的圆环上第p个等分点的灰度。函数s(x)仅与像素点的相对灰度有关,不受像素整体亮度变化的影响 。函数s(x)的定义如下:
(5)
其中,T为减轻噪声及局部灰度变化影响所设置的阈值。
1.3 巴氏距离
某一区域的颜色直方图pu和目标颜色直方图qu之间的相似性用巴氏距离[9]来描述:
(6)
其中,ρ∈[0,1]称为巴氏系数。
巴氏距离表示为:
(7)
d越小,表明该矩形为目标的概率越高。
2 自适应粒子滤波跟踪算法
2.1 联合颜色纹理直方图

(8)
(9)
其中,r为抗扰动因素,r的绝对值越大,表明该值对于灰度变化越鲁棒。

(10)

在维度的选取上,在实验中令m=8×8×8×5,其中用前三维分别计算HSV颜色通道的值,第四维按照式10计算5种纹理模式中的值[14]。
2.2 算法流程

(11)

在算法重采样过程中,不考虑权值小于阈值的粒子,而将权值比阈值大的粒子,按照粒子权值重新分配粒子。
基于联合直方图的自适应粒子滤波跟踪算法实现过程分为以下4个步骤:
步骤1:粒子初始化。粒子数的初始值设定为N,t= 0时刻,在初始帧手动框选跟踪区域,根据式10得到目标的颜色纹理直方图表达式q(u)。
步骤2:状态预测。粒子通过运动模型进行传播,使用的运动模型如下:
(12)
其中,Vt-1为一个高斯随机变量。
步骤3:权值更新。
(1)利用式10计算经过运动传播之后新粒子所在区域的颜色纹理直方图P(u)。
(2)利用式7计算巴氏距离d。
(3)利用式11计算更新权重,并归一化权值。
(13)
(14)
(2)生成一组服从均匀分布的随机数u~U(0,1)。

步骤5:输出。目标状态的均值估计为:
(15)
3 实验与分析
为了验证提出的跟踪算法的性能,在主频为3.30 GHz、内存为8 G的PC机上使用VS2013编程实现。实验过程中第一帧使用鼠标指定待跟踪目标,分别使用传统的粒子滤波算法与文字中算法进行目标跟踪,跟踪效果分别如图1、图2所示。
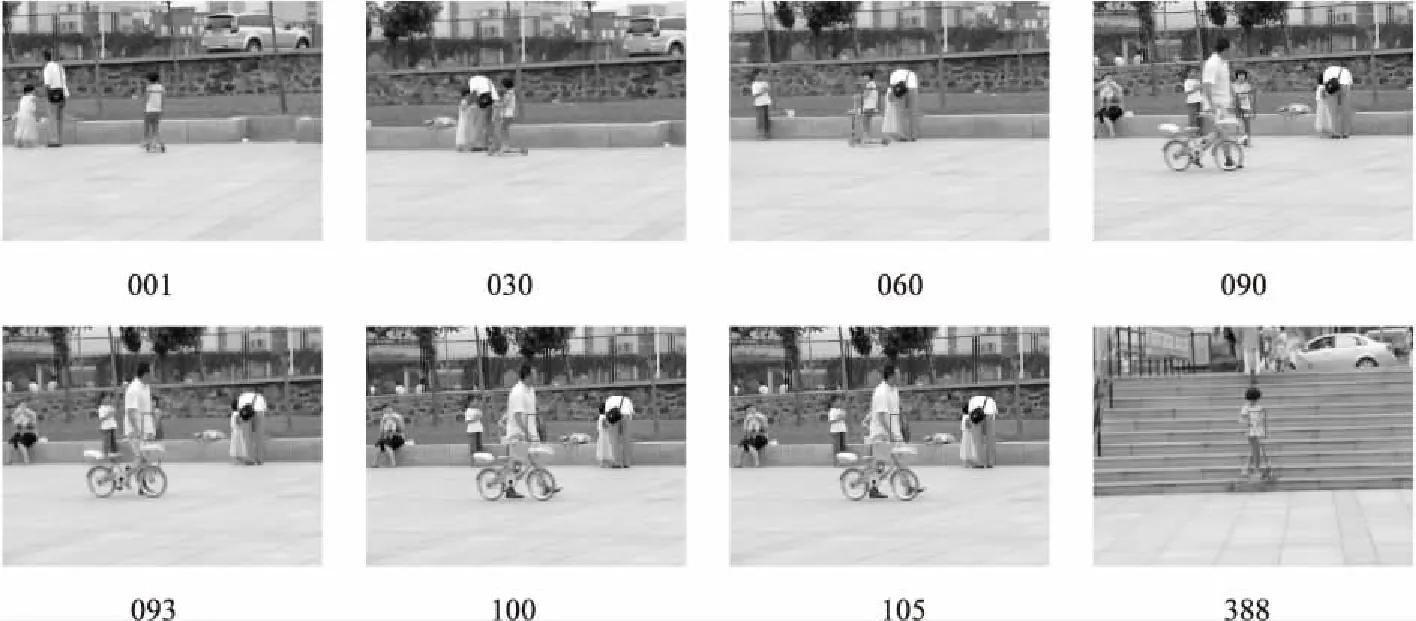
图1 传统的粒子滤波算法
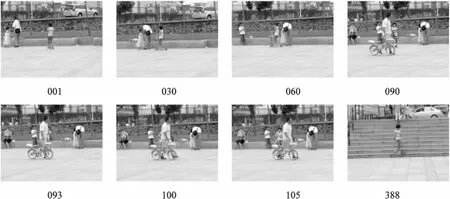
图2 基于颜色纹理联合直方图的自适应粒子滤波跟踪算法
传统的粒子滤波算法由于目标被部分遮挡导致跟踪效果不理想,如图1中第93~105帧所示,后续帧中算法不断在图像中搜索目标,最终在第388帧中正确锁定目标。改进算法由于采用颜色纹理直方图进行跟踪,稳定性有了保障,最终实现对目标物体鲁棒的跟踪,如图2第93~388帧所示。
两种算法在处理速度、平均迭代次数以及成功率的对比如表1所示。实验数据表明,改进算法虽然损失了处理速度,但还是满足实时性的要求,并且跟踪结果更加可靠和鲁棒。
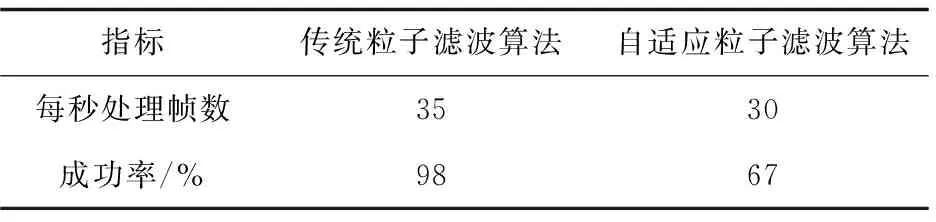
表1 算法性能对比结果
4 结束语
提出了一种基于联合颜色与纹理特征直方图的自适应粒子滤波目标跟踪算法,在利用空间颜色特征的基础上,加入了改进的LBP纹理特征,增强了目标特征的描述。多个不同场景的室内外实验表明,与经典的粒子滤波跟踪算法相比,该算法在抗相似目标的干扰上更加可靠和鲁棒。
参考文献:
[1] YILMAZ A,JAVED O,SHAH M.Object tracking:a survey[J].ACM Computing Survey,2006,38(4):13.
[2] TREPTOW A,ZELL A.Real-time object tracking for soccer-robots without color information[J].Robotics and Autonomous Systems,2004,48(1):41-48.
[3] NUMMIARO K,KOLLER-MEIER E,GOOL L V.An adaptive color-based particle filter[J].Image and Vision Computing,2003,21(1):99-110.
[4] GORDON N J,SALMOND D J,SMITH A F M.Novel approach to nonlinear/non-Gaussian Bayesian state estimation[C]//IEE proceedings F (radar and signal processing).[s.l.]:IET,1993:107-113.
[5] ISARD M,BLAKE A. ICONDENSATION:unifying low-level and high-level tracking in a stochastic framework[C]//European conference on computer vision.[s.l.]:[s.n.],1998:893-908.
[6] MENG Bo,ZHU Ming.Nonlinear object tracking using particle filter[J].Optics & Precision Engineering,2007,15(9):1421-1426.
[7] 董恩增,苏丽娅,付艳红,等.融合颜色纹理特征的自适应粒子滤波跟踪算法[J].计算机测量与控制,2014,22(4):1182-1184.
[8] DEGUCHI K,KAWANAKA O,OKATANI T.Object tracking by the mean-shift of regional color distribution combined with the particle-filter algorithm[C]//International conference on pattern recognition.Cambridge,UK:IEEE,2004:506-509.
[9] 庄 严,战洪斌,王 伟,等.基于加权颜色直方图和粒子滤波的彩色物体跟踪[J].控制与決策,2006,21(8):868-872.
[10] 张 楠,蔡 念,张海员.基于空间直方图的粒子滤波目标跟踪算法[J].计算机工程与应用,2011,47(21):210-213.
[11] 刘 豪,杨永全,郭仙草,等.用于纹理特征提取的改进的LBP算法[J].计算机工程与应用,2014,50(6):182-185.
[12] NING Jifeng,ZHANG Lei,ZHANG D,et al.Robust object tracking using joint color-texture histogram[J].International Journal of Pattern Recognition & Artificial Intelligence,2011,23(7):1245-1263.
[13] 于亚风,刘光帅,马子恒,等.用于纹理特征提取的改进的成对旋转不变共生局部二值模式算法[J].计算机应用,2016,36(12):3389-3393.
[14] 王保云,范保杰.基于颜色纹理联合特征直方图的自适应Meanshift跟踪算法[J].南京邮电大学学报:自然科学版,2013,33(3):18-25.
