机动转弯条件下转子有限元建模方法
2018-06-20罗贵火
张 鹏,罗贵火,王 飞
(南京航空航天大学江苏省航空动力系统重点实验室,南京210016)
0 引言
机动性是飞机重要的战术性能指标,良好的机动性能为飞机带来优异的空中格斗和突防能力。机动飞行会使飞机转子系统承受附加离心力及附加陀螺力矩的影响,飞机转子动力特性也将发生改变。文献[1]考虑了圆盘自由度,利用柔度影响系数法建立了双盘悬臂转子的运动微分方程,研究了水平盘旋和俯冲拉起条件下转子的振动特性;文献[2]以Jeff cot转子为研究对象,利用Lagrange方程建立圆盘的运动微分方程,并对机动飞行下转子的非线性特性进行求解;目前诸多研究[3-8]将圆盘和转子轴视为2个单元,利用柔度影响系数法或Lagrange方程进行建模,在保证计算正确性的同时有效地减少了计算量,但由于转子简化后的自由度较少,计算得到的振型误差相对较大,难以获得转子轴上各位置的响应情况,有一定的局限性。
本文针对机动转弯飞行动作,利用能量法对各有限单元的矩阵进行推导,并对各单元的载荷向量进行推导,建立能够考虑转弯过载的转子有限元建模方法,为机动转弯条件下转子动力学研究提供1种新方法。
1 单元矩阵的推导
1.1 刚性圆盘单元
由文献[9]结论可得圆盘惯性矩阵Me和陀螺矩阵Ge
式中:md为圆盘质量;Id为圆盘直径转动惯量;IP为圆盘极转动惯量。
1.2 线性弹簧单元
由文献[9]结论可得线性弹簧单元的刚度矩阵Kse和阻尼矩阵Cse
式中:Ks1、Ks2分别为线性弹簧在x、y正交方向的刚度系数;Cs1、Cs2分别为线性弹簧在x、y正交方向的阻尼系数。
1.3 Timoshenko梁单元
本文采用考虑剪切变形和转动惯量的Timoshenko梁单元建立转子模型。梁单元局部坐标如图1所示,考虑剪切变形的梁单元如图2所示。
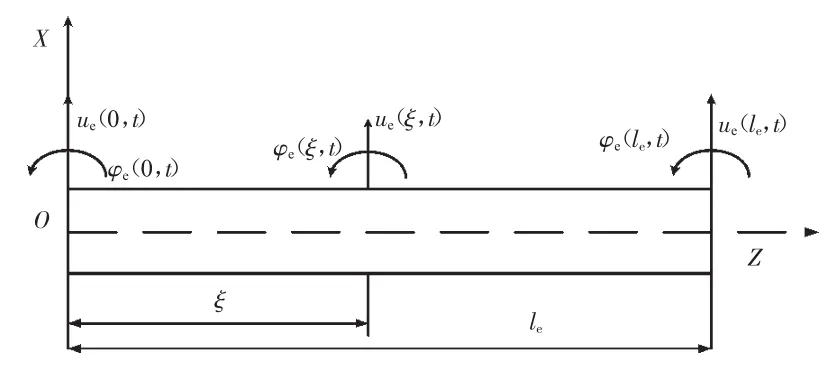
图1 梁单元局部坐标
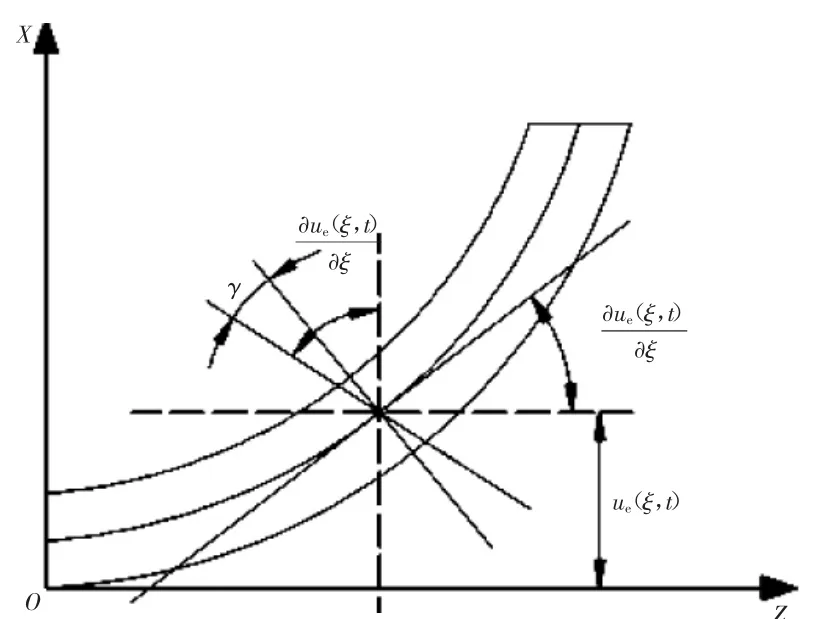
图2 考虑剪切变形的梁单元
梁单元内任一点位移用形函数和节点位移表示为

其中
根据文献[11],Timoshenko梁单元的形函数为
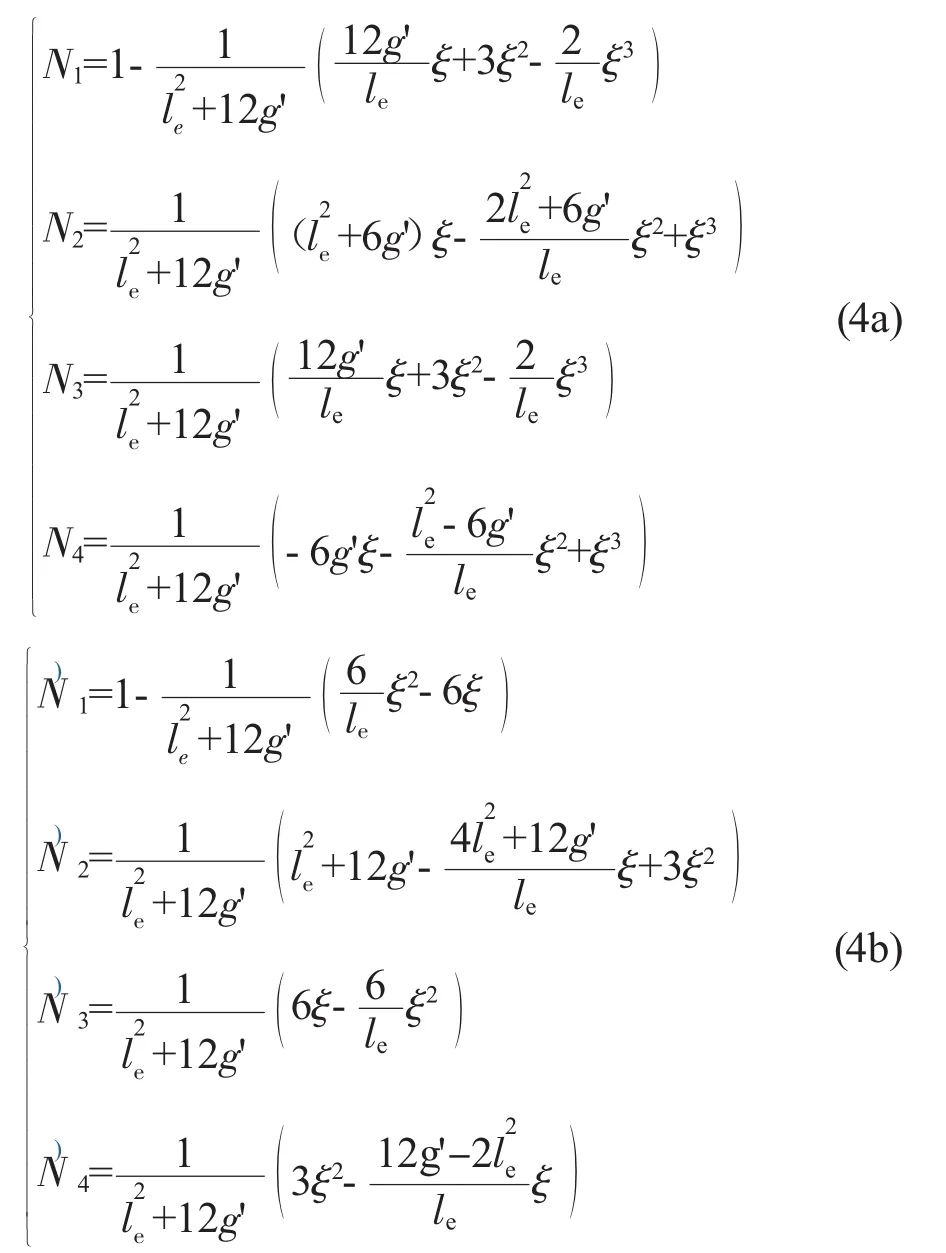
定义剪切修正系数为

式中:μ为轴段材料的泊松比;λ=ri/ro,为内径与外径之比。
轴段的截面惯性矩表达为

式中:R1为轴段内圈半径;R2为轴段外圈半径。定义常数

式中:Ge、Ae分别为剪切模量和截面面积;Ee、Ie分别为材料弹性模量和轴段截面惯性矩。
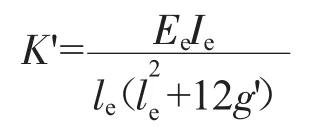
根据文献[11],长度为le的Timoshenko梁单元刚度矩阵Ke可表达为
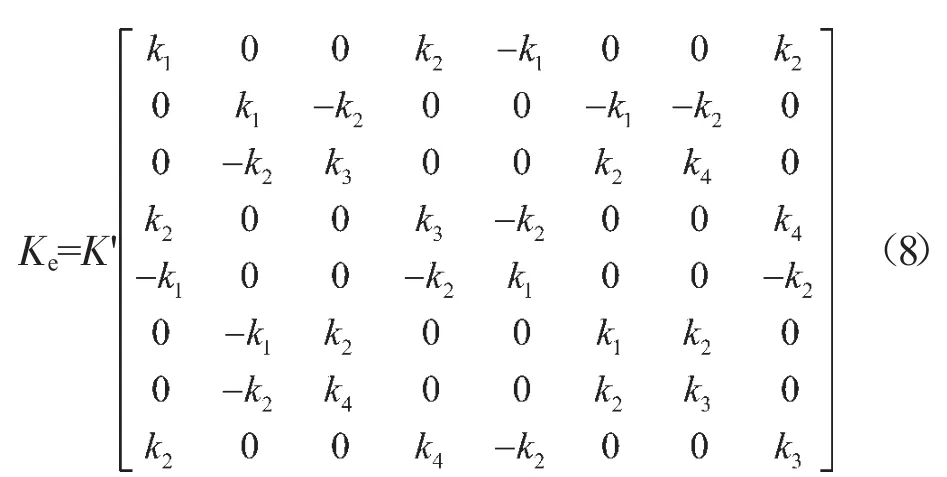
其中
单元的惯性矩阵Me可表达为
其中
单元的陀螺矩阵Ge可表达为

其中
2 载荷向量的推导
2.1 机动转弯轨迹建模
为便于描述机动飞行过程中飞机的姿态,建立机身坐标系如图3所示。其中o0x0y0z0为静止的地面坐标系,obxbybzb为固定在机身上的机身坐标系。

图3 飞机姿态坐标系
飞机的整个机动转弯过程如图4所示,机身姿态如图5所示。飞机在直线段Ⅰ以平飞姿态进行直线飞行;在转弯段Ⅰ内,飞机沿机身中轴线zb滚转角度θB,并且以正弦变机动角速度ωB通过转弯段Ⅰ;随后,无人机以转弯段Ⅰ末的姿态完成转弯段Ⅱ的飞行;在转弯段Ⅲ内,飞机沿机身中轴线zB滚转角度-θB,并且以余弦变机动角速度ωB通过转弯段Ⅲ;最后,飞机完成转弯,沿直线段Ⅱ进行直线平飞。

图4 机动转弯轨迹

图5 机动转弯机身姿态
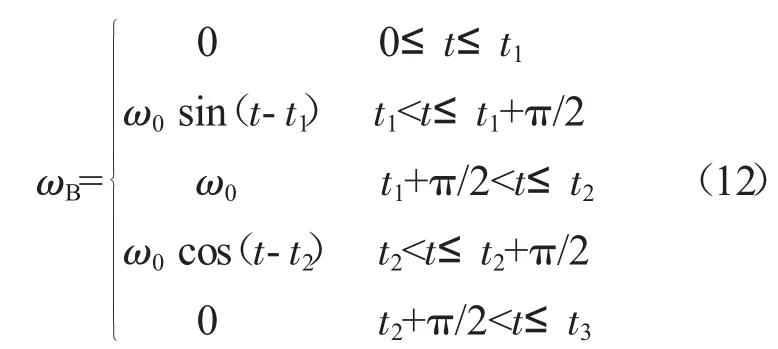
根据以上叙述,假设机动转弯过程中飞机的机动角速度表达为[3]式中:ω0为稳定的机动转弯角速度;t1、t2、t3分别为直线段Ⅰ、转弯段Ⅱ、直线段Ⅱ结束的时刻。
假设机动转弯过程中飞机的滚转角度表达为

式中:θ0为稳定的机身滚转角度。
2.2 梁单元的附加离心力载荷向量
机动转弯条件下单位长度梁单元所受的附加离心力作功为

式中:ωB为机动角速度;RB为转弯轨迹半径;ρe为轴的密度;Ae为轴的截面积;dξ为微元段长度。
对式(14)沿梁单元长度方向积分得

定义
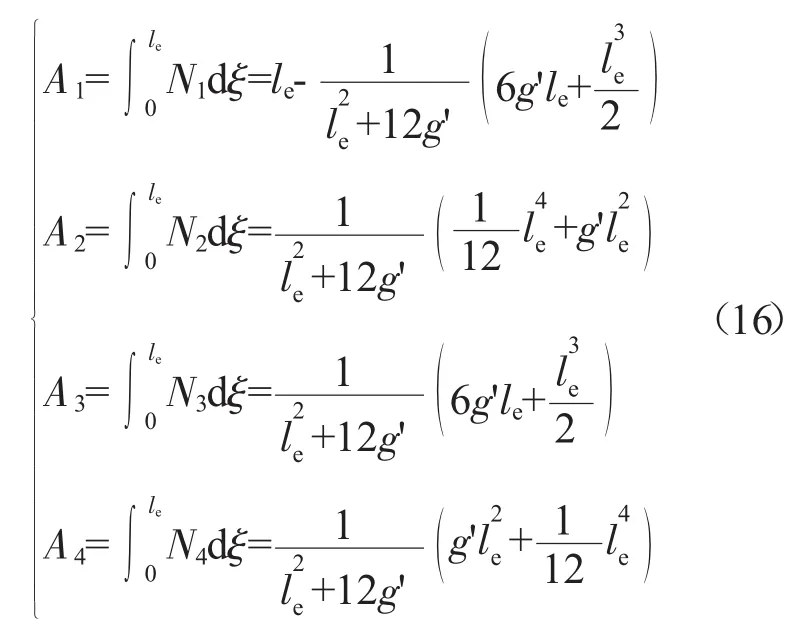
将式(3)、(16)代入式(15)得

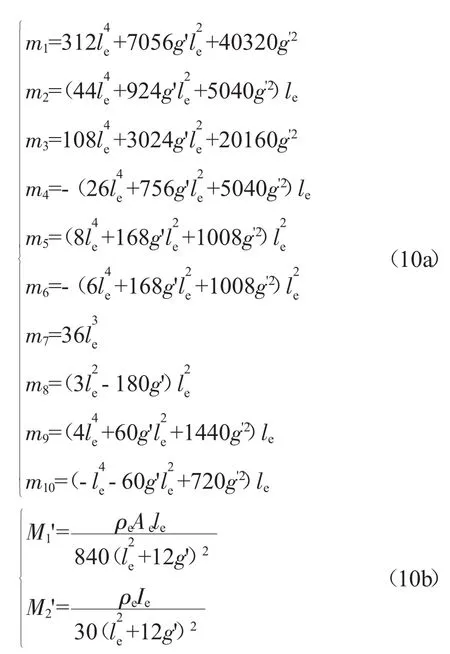
其中
由Lagrange方程得梁单元附加离心力向量为
其 中
2.3 梁单元的附加陀螺力矩载荷向量
机动转弯时梁单元微元段由于转动所承受的动能增量为

对式(20)沿梁单元长度方向积分得

定义
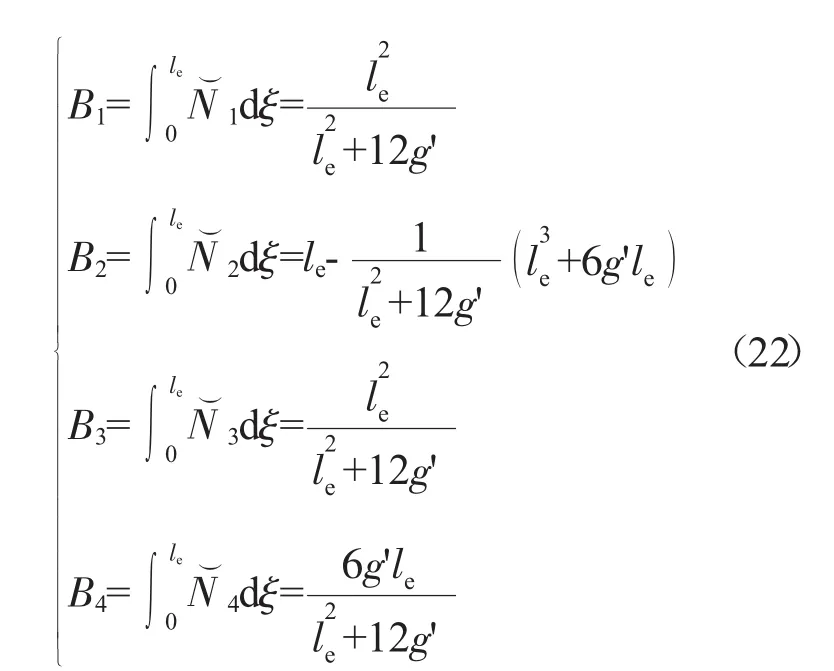
将式(3)、(22)代入式(21)得

其中

由Lagrange方程得梁单元附加陀螺力矩向量为
其中 B'=2ρeIeΩzωB。

2.4 梁单元的重力载荷向量
类比轴所受附加离心力的推导过程,可得机动转弯时轴所受重力载荷向量为

式中:Z2n-1=-Ansin θB;Z2n=Ancos θB,(n=1,2,3,4);An的定义见式(16),Z(=gρeAe,g为重力加速度。
2.5 圆盘的载荷向量
机动转弯时盘承受附加离心力为

盘所受附加离心力在机身坐标轴的分量为

机动转弯时盘承受附加陀螺力矩大小为

盘所受附加陀螺力矩在机身坐标轴的分量为

将盘在机动转弯过程中所受的附加载荷写成向量形式

由图5可得,机动转弯时,盘所受重力在机身坐标系x、y方向的分解为
因此,盘的重力载荷向量为

由于制造误差等因素,盘的质心会偏离盘心一定的距离,使得盘在转动过程中会承受不平衡力载荷,可表达为

式中:me为不平衡量;Ω为自转转速;t为时间。
3 单元矩阵及载荷向量的组装
根据文献[12],对上述推导的单元矩阵和载荷向量进行组装,形成系统惯性矩阵、刚度矩阵、陀螺矩阵和阻尼矩阵分别为M、K、G、C,系统总外载荷向量Psum为

形成转子运动微分方程

4 机动转弯转子振动响应算例
双盘转子有限元模型如图6所示。以图6中的转子为研究对象,计算转子在机动转弯过程中的响应。转子参数见表1,转弯轨迹参数见表2。
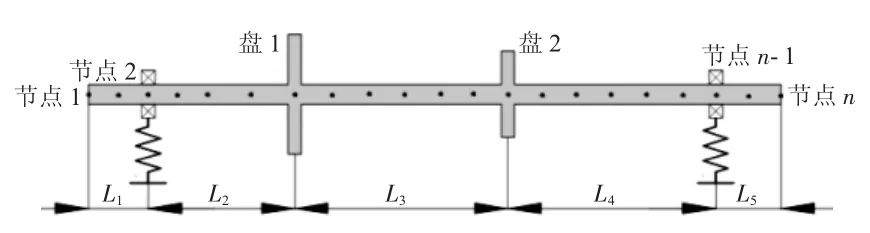
图6 双盘转子有限元模型
将表1和表2中的数据代入式(36),为提高计算效率,利用固定界面模态综合法对系统进行自由度缩减[13-15],对缩减后的模型进行Newmark数值求解[10,16],得圆盘处的瞬态轴心轨迹如图7所示,平飞段稳态轴心轨迹如图8所示,转弯段稳态轴心轨迹如图9所示。
从图7中可见,盘心首先在直线段Ⅰ的位置进行圆周运动;当飞机进入转弯段Ⅰ时,盘心沿转弯段Ⅰ的箭头方向进行螺旋运动,最终到达转弯段Ⅱ的位置,在该位置,飞机作稳定的转弯机动,盘心作稳定的圆周运动,但圆周运动的圆心与直线段Ⅰ的不同;当飞机退出转弯机动时,即飞机进入转弯段Ⅲ,此时盘心沿转弯段Ⅲ箭头方向进行螺旋运动退出转弯机动,最终到达直线段Ⅱ的位置,即回到进入转弯段Ⅰ之前的位置继续做圆周运动。
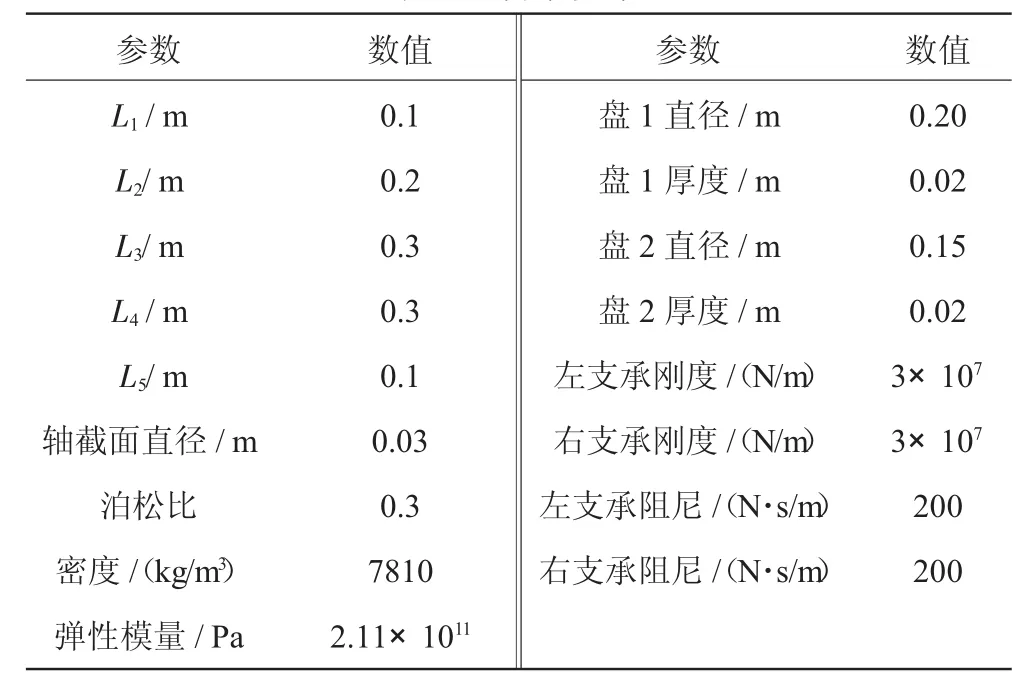
表1 转子参数
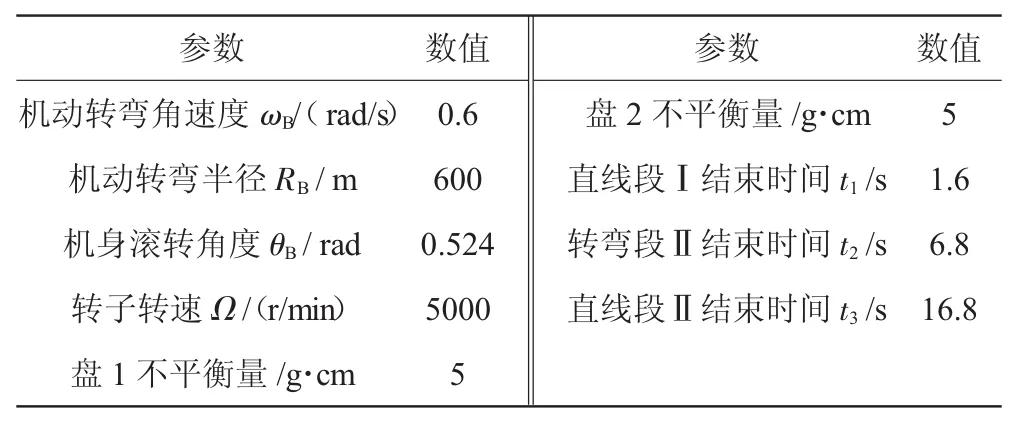
表2 转弯轨迹参数
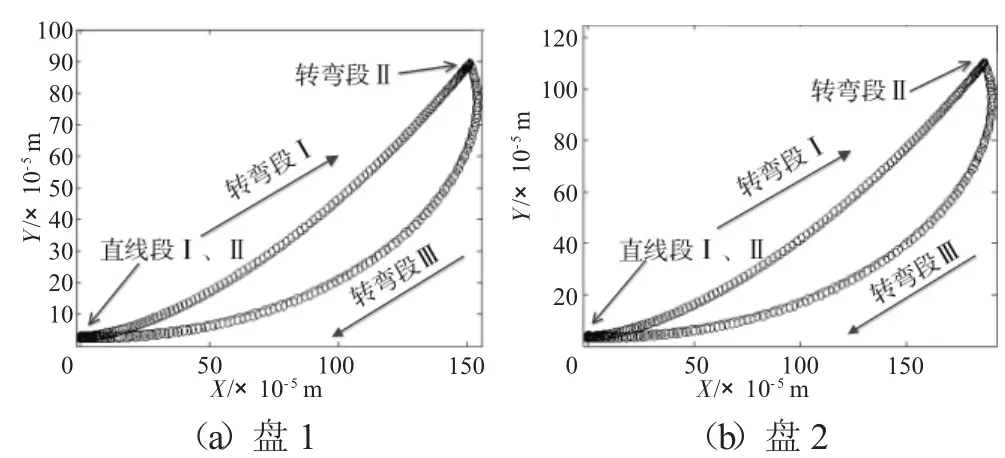
图7 圆盘处的瞬态轴心轨迹(转速为5000 r/min)

图8 平飞段稳态轴心轨迹

图9 转弯段稳态轴心轨迹
从图8、9中可见,平飞和转弯时盘心轴心轨迹都是1个圆,半径大小受不平衡量的影响。对比2图可知机动转弯产生的附加载荷会使转子产生不可忽略的静位移,在实际航空发动机中,这会使得转子系统与周围静子件有发生碰摩的危险。
5 结束语
(1)推导了1套机动转弯条件下转子有限元建模方法,能够方便地考虑轴所承受的附加载荷以及转子支承的非线性力,使机动条件下转子系统建模能够方便地考虑更多的自由度。
(2)求解了线性转子系统在机动转弯条件下的响应,结果表明机动转弯产生的附加载荷会使转子产生静位移。
(3)本文算例的研究对象为某线性转子系统,为了更加贴近实际,未来可将转子支承表示为非线性,作为非线性力加在系统运动微分方程的右端。
[1]徐敏,廖明夫,刘启洲.机动飞行条件下双盘悬臂转子的振动特性[J].航空动力学报,2002,17(1):105-109.XU Min,LIAO Mingfu,LIU Qizhou.The vibration performance of the double-disk cantilever rotor in flight misson[J].Journal of Aerospace Power,2002,17(1):105-109.(in Chinese)
[2]侯磊.机动飞行环境下转子系统的非线性动力学行为研究[D].哈尔滨:哈尔滨工业大学,2015.HOU Lei.Research on nonlinear dynamics of rotor systems in maneuvering flight environment [D].Harbin:Harbin Institute of Technology,2015.(in Chinese)
[3]徐敏,廖明夫.机动飞行条件下带挤压油膜阻尼器的Jeffcot转子系统的振动特性[J].航空动力学报,2003,18(3):394-401.XU Min,LIAO Mingfu.The vibration performance of the Jeffcot rotor system with SFD in maneuver flight[J].Journal of Aerospace Power,2003,18(3):394-401.(in Chinese)
[4]杨永锋.机动飞行下裂纹转子的非线性特性研究[D].西安:西北工业大学,2006.YANG Yongfeng.Study on nonlinear characteristics of cracked rotor under maneuvering flight [D].Xian:Northwestern Polytechnical University,2006.(in Chinese)
[5]祝长生,陈拥军.机动飞行时发动机转子系统动力学统一模型[J].航空动力学报,2009,24(2):371-377.ZHU Changsheng,CHEN Yongjun.General dynamic model of aeroengine's rotor system during maneuvering flight[J].Journal of Aerospace Power,2009,24(2):371-377.(in Chinese)
[6]杨蛟.机动飞行条件下航空发动机转子动力学特性分析[D].天津:天津大学,2012.YANG Jiao.Rotor dynamics characteristc analysis of aero-engine subjected to maneuvering condition[D].Tianjin:Tianjin University,2012.(in Chinese)
[7]弓可.微型涡喷发动机转子动力学特性研究[D].南京:南京理工大学,2013.GONG Ke.Research on rotor dynamic characteristics of micro turbojet engine[D].Nanjing:Nanjing University of Science and Technology,2013.(in Chinese)
[8]林富生,孟光.飞行器机动飞行时发动机转子等变速运动的动力学特性研究[J].航空学报,2002,23(4):356-359.LIN Fusheng,MENG Guang.Dynamic of a maneuvering rotor in constant acceleration and deceleration [J].Acta Aeronautica et Astronautica Sinica,2002,23(4):356-359.(in Chinese)
[9]钟一谔,何衍宗,王正,等.转子动力学[M].北京:清华大学出版社,1987:45-48.ZHONG Yie,HE Yanzong,WANG Zheng,et al.Roror dynamics[M].Beijing:Tsinghua University Press,1987:45-48.(in Chinese)
[10]胡海岩.机械振动基础 [M].北京:北京航空航天大学出版社,2005:152-156.HU Haiyan.Fundamentals of mechanical vibrations [M].Beijing:Beihang University Press,2005:152-156..(in Chinese)
[11]Friswell M I,Penny J E T,Garvey S.D,et al.Lees dynamics of rotating machines[M].London:Cambridge University Press,2010:35-43.
[12]关玉璞,陈伟,崔海涛.航空航天有限元法[M].哈尔滨:哈尔滨工业大学出版社,2009:101-105.GUAN Yupu,CHEN Wei,CUI Haitao.The finite element method in aeronautic and astronautic structures[M].Harbin:Harbin Institute of Technology,2009:101-105.(in Chinese)
[13]李洪亮.用模态综合法对双转子系统进行动力学分析[D].哈尔滨:哈尔滨工业大学,2010.LI Hongliang.Dynamic analysis of a dual-rotor system by component mode synthesis[D].Harbin:Harbin Institute of Technology,2010.(in Chinese)
[14]安方.固定界面模态综合法的理论分析[D].南京:南京航空航天大学,2008.AN Fang.Research on the theoretical analysis of fixed-interface modal synthesis techniques[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2008.(in Chinese)
[15]刘明杰.固定界面模态综合法的动力学原理[J].浙江大学学报(工学版),1985(6):189-192.LIU Mingjie.The dynamical principal of fixed-interface modal synthesis metheod [J].Journal of Zhejiang University(Engineering science),1985(6):189-192.(in Chinese)
[16]李庆扬.数值计算原理[M].北京:清华大学出版社,2000:55-60.LI Qingyang.Principle of numerical calculation[M].Beijing:Tsinghua University Press,2000:55-60.(in Chinese)