精确直线可展机构及其动力学分析
2018-06-19畅博彦李文启金国光宋艳艳
畅博彦 李文启 金国光 宋艳艳
1.天津工业大学机械工程学院,天津,300387 2.天津工业大学天津市现代机电装备技术重点实验室,天津,300387
0 引言
可展机构是由预制单元集成的,能够从初始的紧密构形展开到预先设定的展开构形,且是具有一定承载能力的机构。可展机构中的直线可展机构在交通运输和航空航天等领域[1-3]有着广泛的应用前景。
直线运动机构是构造直线可展单元的基础,如 Peaucellier-Lipkin机构、Kempe机构、Sarrus机构、Hart直线机构、Bricard直线机构和Radasat雷达天线展开机构[4]等,均可实现精确直线运动;Watt机构、Roberts机构、Chebyshev机构、Hoekens机构、λ形机构等[5-7]可实现近似直线运动,且以上所述直线运动机构中均只含有转动副。LU等[8]以Hoekens机构为基础,设计得到一种新型直线可展单元,研究了该可展单元的模块化组成原理,构造出了一种大型直线可展机构,并对机构的静刚度进行了分析。YANG等[9]以混联运动支链替代Sarrus机构原有支链,设计得到6种对称结构的直线运动机构,所得机构与Sarrus机构相比,具有更好的力承载性能。张武翔等[10]以调整结构势能最小为目标,研究了Radasat机构尺寸调整的数学模型,给出了2种有效的杆长尺寸调整方法。WEI等[11]对单闭环空间对称8R机构的几何运动特性进行了分析,构造出一种空间直线可展单元,并通过扩展设计得到一种新的矩形直线运动机构,该机构只有一个自由度,属于高度过约束机构。DING等[12]依据多面体几何理论,将一种特殊结构的空间连杆机构用于直线可展机构的设计,并对可展机构的运动特性进行了分析。
剪叉机构因其具备可展性好、制造安装方便的优点,是直线可展单元模块化扩展时的一种常用机构[13]。李端玲等[14]基于螺旋理论和球面几何理论,对单个球面剪叉单元的自由度特性进行了研究,建立了包含n个支链、m个剪叉单元的球面可展机构运动学模型。袁茹等[15]、孙远涛等[16]分别以剪叉式环形阵列机构和直线阵列机构为对象,建立了机构的运动学和动力学模型,并对机构展开过程中的动态特性进行了研究。
本文将Hart直线机构和剪叉机构相结合,提出一种仅含转动副的直线可展单元,经模块化组合和扩展后,构造出一种精确直线可展机构,并对该机构的结构学、运动学和动力学进行分析和仿真研究。
1 精确直线可展机构及其组成原理
图1为精确直线可展机构实物图,该机构由图2所示的3种模块(即底部模块、中部模块和顶部模块)经转动副顺序连接而成。3种模块均为轴对称结构,并由2组同类型的直线可展单元反向对称安装而成,其中直线可展单元根据所在模块位置不同,其结构略有差异,但均以Hart直线机构和剪叉机构为基础构造得到,构造过程见图3。
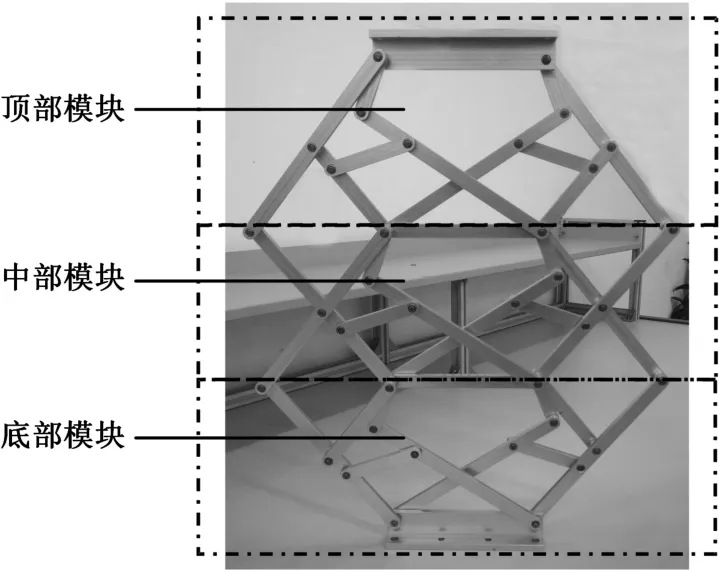
图1 精确直线可展机构实物图Fig.1 Physical map of the accurate straight-line deployable mechanism
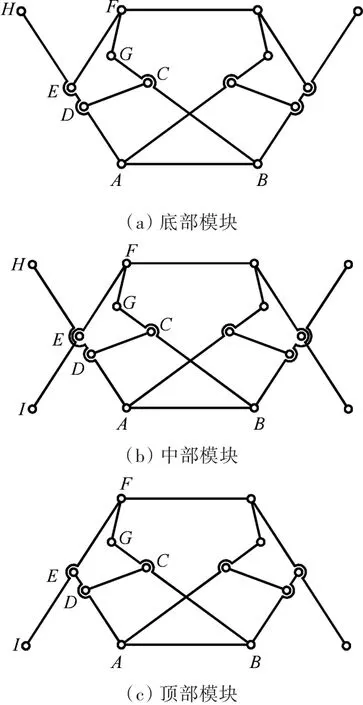
图2 三种模块简图Fig.2 Diagram of the three modules
Hart直线机构是一种特殊的平面六杆机构,见图4,其中以杆AB为机架,可将杆BG的摆动转化为点F沿y轴方向的精确直线运动。根据该机构的几何尺寸要求,需要有 LAE=LFE成立,由此关系可得配对剪叉机构的杆长约束条件为LAE=LEH=LFE=LEI,因此,在直线可展单元中,有如下关系成立:

即I点的运动轨迹为沿x轴方向的精确直线,用于实现剪叉机构的开合运动。
机构模块化装配时,可通过改变中间模块的数量来调节机构的行程;机构模块化装配完成后,通过控制剪刀叉的开合可实现相邻模块间运动和动力的传递,并最终实现机构的展开或收合运动,见图5。
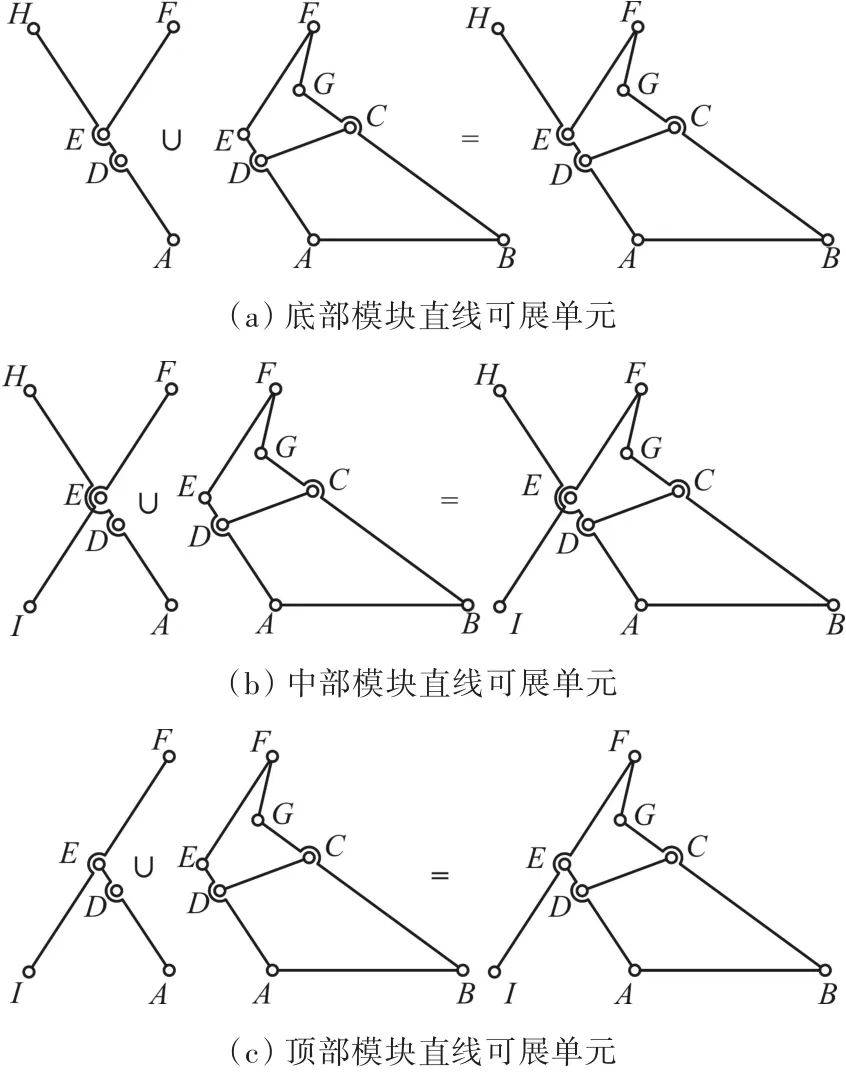
图3 三种直线可展单元构成简图Fig.3 Diagram of three straight-line developable units

图4 Hart直线机构Fig.4 Hart straight-line mechanism
图5 精确直线可展机构的两个构态Fig.5 Two configurations of the accurate straight-line deployable mechanism
该精确直线可展机构与现有机构相比具有如下优点:①仅含有转动副,机构具有耐磨性强、使用寿命长、加工制造方便、不易卡死等优点;②采用模块化设计,通过改变中部模块的安装数量可实现最大伸缩量的改变,机构应用范围广,适应能力强;③采用对称布置结构,增大了机构的整体支撑强度,具有承载能力高、力传递性能好的优点;④该机构可实现精确直线运动,且为单自由度机构,有利于实现对机构的精确控制。
2 精确直线可展机构运动学建模
Hart直线机构中各杆件长度需满足:以短杆FG的杆长为单位长度,杆AE和杆FE的长度均为杆FG长度的1/k倍,杆AB的长度为杆FG长度的(1-k2)/k2倍,杆BG的长度为杆FG长度的1/k2倍,杆CD的长度为杆FG长度的(1-k2)/k倍,k为机构的杆长比例系数且0<k<1;点D距点A的长度等于杆CD的长度,点C距点B的长度等于杆AB的长度。
以点A为原点,杆AB为 x轴,建立固定坐标系 Oxy,各杆件与 x轴夹角分别为 θ1、θ2、θ3、θ4、θ5(见图4)。
针对闭环运动链ABCDA,列写闭环矢量方程:

即

针对闭环运动链AEFGBA,列写闭环矢量方程:

即

将各杆件的长度关系代入式(2)和式(3),并结合装配关系可求得

根据几何关系,F点坐标(xF,yF)可表示为


将式(7)代入式(8)中可得即Hart直线机构中,点F的运动轨迹为沿 y轴方向的精确直线,其运动规律可通过式(9)中 yF的表达式求得。
n层精确直线可展机构中共含有n个模块(n≥2),包括1个底部模块、(n-2)个中部模块和1个顶部模块,见图6。以各模块内部的可展单元为研究对象,在各自的动坐标系中,其运动规律均满足式(4)~式(9)。通过各模块的叠加实现了对机构直线运动行程的比例放大,即第n层模块中点F的运动规律可以表示为

图6 n层精确直线可展机构简图Fig.6 Accurate straight-line deployable mechanism consisted with n-layer modules
3 精确直线可展机构动力学建模
基于Lagrange方程进行系统动力学分析,选定系统广义坐标,求出系统动能、势能和广义力的表达式,代入Lagrange方程中,即可导出系统动力学方程

式中,l为系统的自由度;qi为广义坐标;U为系统的总势能;T为系统的总动能;Qi为对应于广义坐标qi的广义力。
3.1 系统的总重力势能
图6中,3种模块中共有8种杆,分别是杆AB、杆AE、杆AH、杆BG、杆CD、杆FE、杆FI、杆FG,对应杆件的数量分别为(n+1)个、2个、2(n-1)个、2n个、2n个、2个、2(n-1)个、2n个,各杆件质量分别用 m1、m2、m3、m4、m5、m6、m7、m8表示。
假设机构中各构件均为匀质杆,且其质心为杆件的几何中心,根据机构的组成原理和轴对称性,可得8种杆件质心坐标的通用表达式为
由式(12)~式(19)可求解得到n层精确直线可展机构中全部杆件的质心坐标。根据所求质心坐标,n层精确直线可展机构的总重力势能为

3.2 系统的总动能
n层精确直线可展机构中,所有杆件均作平面运动,各杆件动能的通式为

式中,J为各构件绕质心的转动惯量;ω为各构件绕质心转动的角速度;m为各构件的质量。
根据式(21),可得到系统中8种类型杆件的动能分别为
式中,J2、J3、J4、J5、J6、J7、J8分别为杆AE、杆AH、杆BG、杆CD、杆FE、杆FI、杆FG绕其各自质心的转动惯量。
综上8种类型杆件的动能,进而可求得系统的总动能为

3.3 系统动力学模型的建立
n层精确直线可展机构为单自由度系统,选取杆BG的转角θ1为广义坐标,忽略各运动副间的摩擦、间隙和杆件变形,将式(20)和式(22)代入式(11),可建立系统动力学模型:

根据所建动力学模型的表达式(式(23)),即可求出该机构在给定运动规律时,所需的驱动力矩,数值计算过程见图7。

图7 动力学数值仿真流程图Fig.7 Flow chart of the simulation for dynamics
4 精确直线可展机构动力学仿真
以图1所示的3层精确直线可展机构为例,对其进行动力学数值仿真和虚拟仿真。取杆FG的长度 LFG=0.06 m,杆长比例系数k=0.5,各杆件横截面均为0.016 m×0.006 m的矩形,材料均选用铝合金,密度为2 700 kg/m3,该机构各构件几何参数与物理参数见表1。
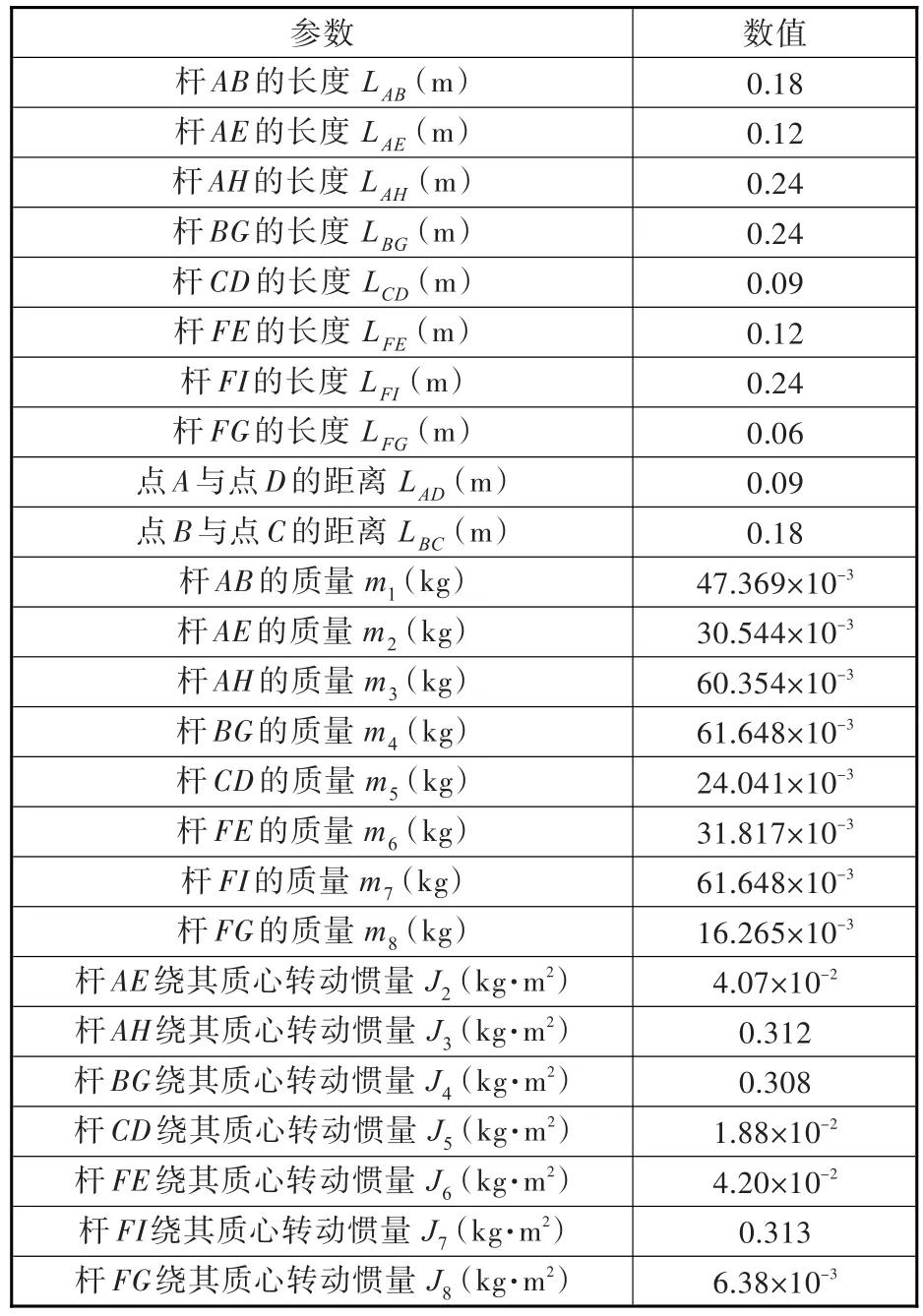
表1 精确直线可展机构的几何参数与物理参数Tab.1 Geometric parameters and physical parameters of accurate straight-line deployable mechanism
在SolidWorks软件中按照表1所示的参数建立3层精确直线可展机构的三维模型,见图8。对机构进行虚拟运动仿真,得到该机构在不发生干涉的条件下,θ1=10.4°时机构处于最大压缩状态;θ1=51.4°时机构处于最大伸展状态。将θ1min=10.4°和 θ1max=51.4°代入该机构的伸缩率计算通式:
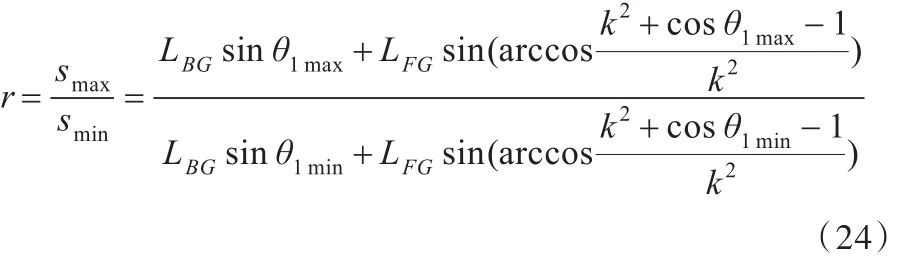
其中,smax、smin分别为点F与点A距离的最大值和最小值,进而可求得该组参数条件下机构的伸缩率为3.69。
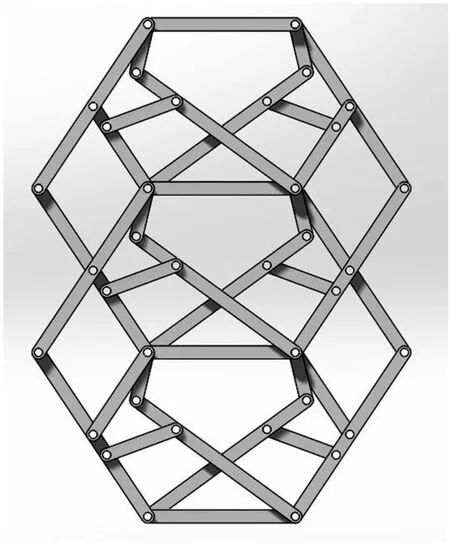
图8 3层精确直线可展机构三维图Fig.8 The 3D modeling of accurate straight-line deployable mechanism consisted with 3-layer modules
设杆BG为驱动杆,初始位置时机构处于最大压缩状态,0~6 s时驱动杆沿顺时针方向以6.83°/s的角速度进行匀速转动,6~8 s时保持静止,8~14 s时驱动杆逆时针以6.83°/s的角速度进行匀速转动。运用Motion插件对机构进行动力学分析,得到精确直线可展机构末端执行器输出(即顶部模块F点)的运动规律和机构所需的驱动力矩。根据相同的机构结构参数和运动输入参数,基于动力学模型式(23),运用数值仿真软件进行数值计算,将得到的数值计算结果与虚拟仿真结果相比较见图9和图10,可以看出,虚拟仿真结果与数值计算结果一致,验证了所建动力学模型的正确性和有效性。
由图9可以看出,在输入运动规律为匀速运动的条件下,运动开始和运动终止时,机构末端执行器输出速度分别由0突变为0.125 m/s,再由-0.125 m/s突变为0,理论上此时加速度趋近于无穷大,由此产生的巨大惯性力导致机构存在刚性冲击;运动时间为6 s和8 s时,机构末端执行器输出的速度为0,但加速度出现有限值突变,导致惯性力突然变化而产生柔性冲击。以上两类冲击将直接作用于末端执行器,并对机构的运动稳定性、可靠性和运动精度产生影响,因此,必须对输出末端执行器的运动规律和驱动力矩进行优化。选取正弦加速度曲线为机构末端执行器的输出运动规律,根据几何参数可得到末端执行器的位移满足:


图9 末端执行器输出运动规律Fig.9 The motion of end-effector
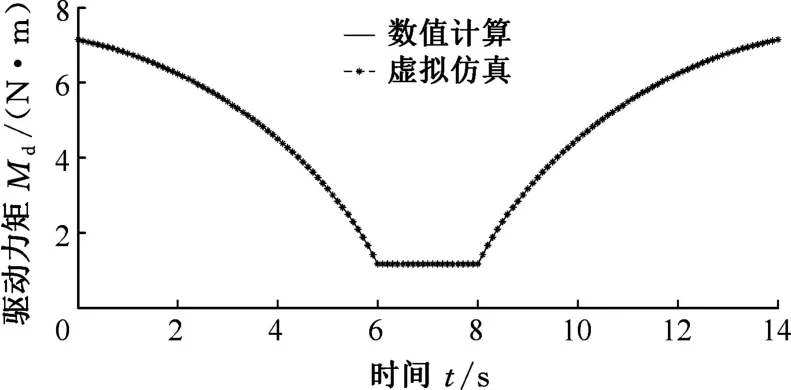
图10 驱动力矩曲线Fig.10 The curve of driving torque
通过数值仿真软件对式(25)所示的精确直线可展机构末端执行器的输出运动规律进行数值计算,得到其运动规律见图11。由图11可以看出,对机构的运动规律进行优化后,机构在整个运行过程中,末端执行器输出的速度和加速度均连续,且在机构运动开始、运动时间为6 s、运动时间为8 s和运动终止时,速度和加速度均为零,不产生刚性或柔性冲击,保证了机构在连续运动过程中不会对末端执行器产生冲击作用,从而有效提高了机构的稳定性、可靠性和运动精度。
联立式(25)、式(9)和式(10),可求出杆BG的转角θ1,再将求解得到的θ1代入机构动力学方程式(23)中,可求解得到优化后机构所需的驱动力矩见图12。
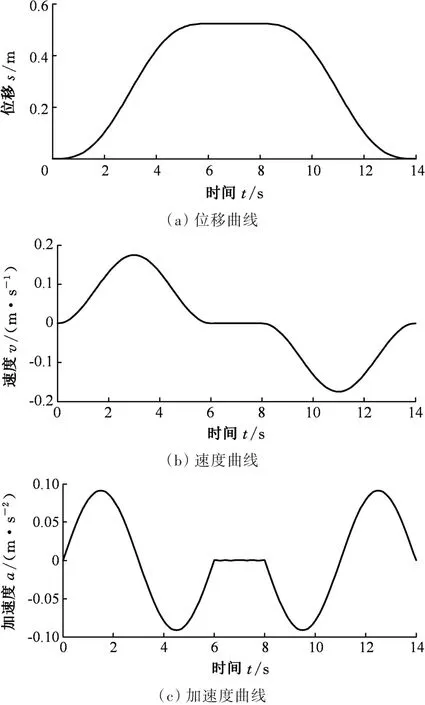
图11 优化后末端执行器的输出运动规律Fig.11 The motion of end-effector after optimization
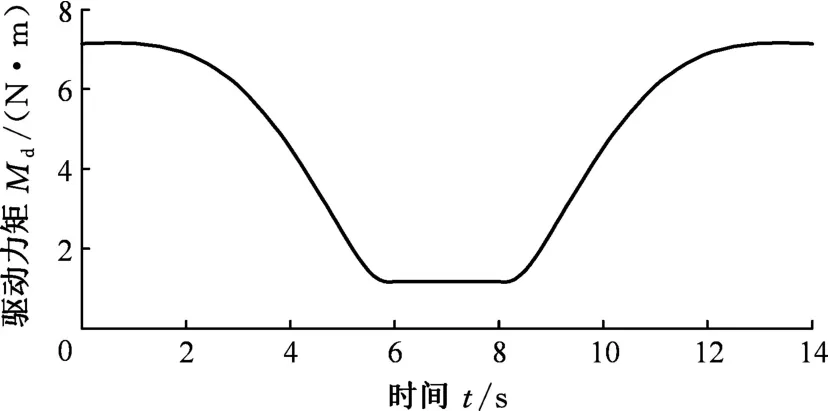
图12 优化后驱动力矩曲线Fig.12 The curve of driving torque after optimization
5 结论
(1)提出了一种新型精确直线可展机构,阐述了该机构的模块化组成原理,并运用矢量代数法构建了机构的运动学模型。
(2)运用Lagrange方法建立了新型精确直线可展机构的动力学模型,并以3层精确直线可展机构为例,应用虚拟仿真技术验证了所建动力学模型的正确性,所建动力学模型可为机构的动力学分析和优化设计奠定基础。
(3)针对匀速驱动时精确直线可展机构存在刚性和柔性冲击的问题,对该机构末端执行器输出运动规律和驱动力矩进行优化设计。结果表明:末端执行器的输出运动规律采用正弦加速度曲线时,可有效避免由于机构惯性力过大而产生的冲击作用,为保证机构运动的稳定性、可靠性和精确性提供了方法和依据。
[1] 孙光旭,袁端才.液压剪叉式升降台的动力学仿真[J].系统仿真学报,2010,22(11):2650-2653.SUN Guangxu,YUAN Duancai.Dynamics Simulation of Scissors Elevating Platform Powered Hydraulic Cylinder[J].Journal of System Simulation,2010,22(11):2650-2653.
[2] 胡明,章斌,陈文华,等.“一字型”折叠翼展开试验与仿真验证分析[J].中国机械工程,2015,26(13):1801-1805.HU Ming,ZHANG Bin,CHEN Wenhua,et al.Expand Performance and Simulation Verification of Line-styled Folding-wing[J].China MechanicalEngineering,2015,26(13):1801-1805.
[3] 韩莹莹,袁茹,郑钰祺.环状可展机构运动学分析方法及应用研究[J].中国机械工程,2013,24(9):1142-1145.HAN Yingying,YUAN Ru,ZHENG Yuqi.Research on Kinematics Analysis Method and Its Application of Circular Developable Mechanisms[J].China Mechanical Engineering,2013,24(9):1142-1145.
[4] THOMAS W D R.RADARSAT-2 Extendible Support Structure[J].Canadian Journal of Remote Sensing,2004,30(3):282-286.
[5] NORTON R L.Design of Machinery[M].New York:McGraw-Hill,2001.
[6] DIJKSMAN E A,SMALS A T J M.λ-formed 4-bar Linkages Set in a Translation-position to Design Mechanisms Approximating a Straight Line[J].Mechanism and Machine Theory,1996,31(8):1033-1042.
[7] 钱卫香,韩建友.实现近似直线轨迹的λ形机构综合方法[J].农业机械学报,2008,39(6):154-158.QIAN Weixiang,HAN Jianyou.Synthesis Method of λ-formed Linkages Approximating a Straight Line[J].Transactions of the Chinese Society of Agricultural Machinery,2008,39(6):154-158.
[8] LU S N,ZLATANOV D,DING X L,et al.A New Family of Deployable Mechanisms Based on the Hoekens Linkage[J].Mechanism and Machine Theory,2014,73(2):130-153.
[9] YANG J L,FENG G,ZHU K J,et al.Type Synthesis of Spatial Straight Line Mechanisms with Only Revolute Joints[J].Journal of Donghua University(English Edition),2012,29(2):134-138.
[10] 张武翔,杨毅,罗均,等.多环闭链可展机构尺寸调整方法[J].机械工程学报,2015,51(19):11-20.ZHANG Wuxiang,YANG Yi,LUO Jun,et al.Size Adjustment of Multi-closed-loop Deployable Mechanisms[J].Journal of Mechanical Engineering,2015,51(19):11-20.
[11] WEI Guowu,CHEN Yao,DAI Jiansheng.Synthesis,Mobility,and Multifurcation of Deployable Polyhedral Mechanisms with Radially Reciprocating Motion[J].Journal of Mechanical Design,2014,136(9):1-12.
[12] DING X L,YANG Y,DAI J S.Design and Kinematic Analysis of a Novel Prism Deployable Mechanism[J].Mechanism and Machine Theory,2013,63(5):35-49.
[13] 杨毅,丁希仑.剪式单元可展机构静力学分析与拓扑优化设计[J].中国机械工程,2010,21(2):184-189.YANG Yi,DING Xilun.Analysis and Topology Optimization of Deployable Mechanism Based on Pantograph[J].China Mechanical Engineering,2010,21(2):184-189.
[14] 李端玲,张忠海,于振.球面剪叉可展机构的运动特性分析[J].机械工程学报,2013,49(13):1-7.LI Duanling,ZHANG Zhonghai,YU Zhen.Kinematic Characteristic Analysis of Spherical Scissors Deployable Mechanisms[J].Journal of Mechanical Engineering,2013,49(13):1-7.
[15] 袁茹,王剑,王三民,等.剪刀机构环形阵列可展结构的运动学与动力学研究[J].中国机械工程,2014,25(17):2309-2313.YUAN Ru,WANG Jian,WANG Sanmin,et al.Kinematics and Dynamics Analysis of Ring Array Deployable Structures Based on SLE[J].China Mechanical Engineering,2014,25(17):2309-2313.
[16] 孙远涛,王三民,刘霞.剪式机构线性阵列可展结构的动力学特性研究[J].中国机械工程,2012,23(24):2917-2925.SUN Yuantao,WANG Sanmin,LIU Xia.Dynamics Research ofLinearArray Deployable Structures Based on Structure of Scissor-like Element[J].China Mechanical Engineering,2012,23(24):2917-2925.