半球谐振陀螺技术发展趋势
2018-06-15贾智学付丽萍任佳婧
贾智学,付丽萍,任佳婧
(1.陕西航天时代导航设备有限公司,宝鸡721006;2.中国航天科技集团有限公司,北京100048)
0 引言
半球谐振陀螺(Hemispherical Resonator Gyroscope,HRG)是基于哥氏振动原理具有惯导级性能的高精度新型固体振动陀螺,利用半球唇壳的径向振动驻波进动效应感测基座旋转。具有结构简单、高精度、长寿命、高可靠、抗辐射的特点,有良好的振动冲击性能、温度特性,具有独特关机运行和抗辐射能力,漂移精度达到0.0001(°)/h,寿命可达15年。半球陀螺独特的优势在空间领域有广阔的应用前景,如卫星或空间飞行器惯性测量单元、姿态稳定控制。
哥氏振动陀螺不仅具有所有惯性仪表的品质,而且与 “两光”陀螺比较,有小型化的优势。国际电子电气工程协会 (IEEE)编制了哥氏振动陀螺规范指南与试验程序,哥氏振动陀螺被列入具有极大发展潜力的新型固态陀螺,受到国际惯性技术界的重视。
1 半球谐振陀螺优势
1.1 结构简单
半球谐振陀螺主要包括石英谐振子、激励罩和敏感基座3个部分,图1为美国Northrop Grumman HRG130P半球谐振陀螺结构图。
1.2 高可靠性
半球谐振陀螺是振动陀螺的一种,相比较其他类型的惯性器件,如液浮式陀螺、动调式陀螺、激光光纤陀螺等,零件数目减少很多,提高了可靠性。各类陀螺零件对比如图2所示。

图2 各类陀螺零件数比较图Fig.2 Comparison of parts of all kinds of gyroscopes
截至2012年,有135颗卫星应用半球谐振陀螺系统,累计在空间无故障工作2×107h,无一失效。
1.3 高精度
半球谐振陀螺在其结构简单、体积小的情况下,仍能做到0.0001(°)/h的高精度,较石英陀螺、硅基微陀螺精度高很多。针对航天卫星任务需求,以及新一代战略武器的长距离、高精度的技术要求,半球谐振陀螺具有独特的优势。
从图3可以看出,半球谐振陀螺覆盖宇航、战略、战术等应用领域,具有长寿命、高可靠的特点,是21世纪最具前景的陀螺技术之一。

图3 HRG零偏稳定性Fig.3 Bias stability of HRG
2 工作原理
半球谐振陀螺机理是基于哥氏力,通过半球谐振子唇缘驻波进动效应测量基座旋转的新型振动陀螺。半球谐振子在静电力驱动下产生二节驻波,振动是四波幅振动,驻波由4个波腹和4个波节组成。如图4所示,当基座静止时,波腹和波节位置保持不变;当基座转动时,驻波发生进动,进动角度为基座旋转角度的30%。通过检测波节出驻波振动分量幅值和相位,就可得出旋转角度或角速率。

图4 工作原理图Fig.4 Working principle of HRG
3 关键技术
3.1 谐振子精密加工
半球陀螺的基座、谐振子和外罩均为熔融石英,材料具有极低的热膨胀系数、极好的化学稳定性、极高的品质因数,但材料硬度高而脆,对于谐振子异型薄壳内外球面同心度、圆度等形位公差要求在3μm以内,对加工设备、工艺方法要求很高。精密加工后的石英谐振子如图5所示。

图5 精密加工的谐振子图Fig.5 Precision machined harmonic oscillator
3.2 球面镀膜技术
在球壳的双面均匀镀膜,激励罩、读出基座相应电极位置进行金属化处理,形成激励电容施加静电控制以及读出电容检测谐振子波形。镀膜效果如图6所示,球面镀膜技术的关键在于镀膜的均匀性和相应电极位置的准确性,稍有偏差就会对陀螺的精度产生影响。

图6 镀膜效果图Fig.6 Diagram of coating effect
3.3 谐振子调平技术
加工出的石英谐振子与理想的对称形状总是存在一些偏差,实际加工出来的谐振子具有圆柱度和同轴度超差的现象,普遍存在着谐振子质量分布不平衡等,这样导致谐振子频率裂解增大。而高精度的陀螺要求频率差小于0.01Hz,质量的差异小于0.1mg,也就是说差异越小越好,对称的程度影响着陀螺的精度。
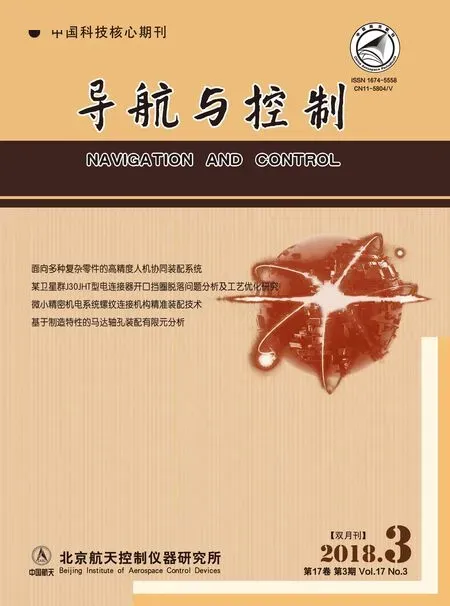
图7 陀螺稳定性与裂解频率的关系图Fig.7 Relationship between the frequency mismatch and the stability of gyroscope
从图7可以看出,当阻尼ε一定时,纵坐标漂移随横坐标裂解频率减小而成线性减小。裂解频率提高一个量级,漂移也会随着提高一个量级。而高精度陀螺的裂解频率要在0.001Hz这个值附近,这就具有一定的难度。
3.4 驱动与信号检测技术
HRG采用静电驱动、电容检测,敏感模态信号微弱对驱动控制和敏感系统要求很高,陀螺驱动信号的中心频率和幅值的稳定控制也非常重要。
4 国内外半球陀螺发展现状
4.1 国外研究情况
20世纪60年代,美国开始研究半球陀螺。20世纪90年代,开始采用基于HRG130P半球陀螺系统执行NEAR着陆小行星任务。2001年,完成触地着陆,实现人类首次小行星软着陆。之后,又执行了CASSINI环土星任务、水星探测任务、DEEPIMPACT撞击彗星任务等。2009年,哈勃望远镜上的气体轴承的液浮陀螺全部被半球谐振陀螺替换,哈勃望远镜测试陀螺性能零偏稳定性为0.00008(°)/h。 图8为美国半球谐振陀螺的研制进程,表1为某半球谐振陀螺的技术参数。
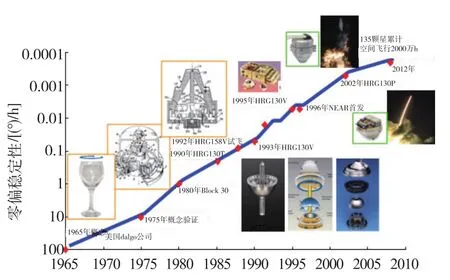
图8 美国HRG研制进程图Fig.8 Development process of American HRG

表1 半球谐振陀螺的技术参数Table 1 Technical parameters of HRG
莫斯科鲍曼国立技术大学在半球谐振陀螺理论基础方面进行了深入研究,出版关于半球谐振陀螺的专著,并在谐振子调平方法、漂移模型和信号采集系统实现提出独特的见解。拉明斯克设计局在20世纪90年代研制了直径为Φ50mm和Φ100mm的半球谐振陀螺,随机漂移精度达到0.005(°)/h~0.01(°)/h。 梅吉科科研所研制了直径为Φ30mm的HRG,开发独特调平技术,产品用于石油探测,如图9所示。
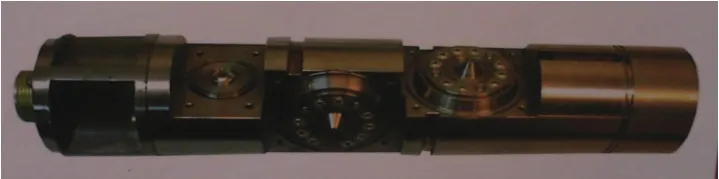
图9 石油测斜仪Fig.9 Oil logging tool
法国的SAGEM公司研发了REGYS20半球谐振陀螺,优化谐振子结构进一步小型化,适应批生产要求,年生产5000只半球谐振陀螺。目前,形成了陆地导航系统、船用罗经、机载惯性系统、空间导航等系列产品。2014年,8颗卫星在轨运行,超过100只半球谐振陀螺应用在空间领域。截止2016年,超过4000只半球谐振陀螺应用在Hamner战术导弹上。图10为某半球谐振陀螺结构图。
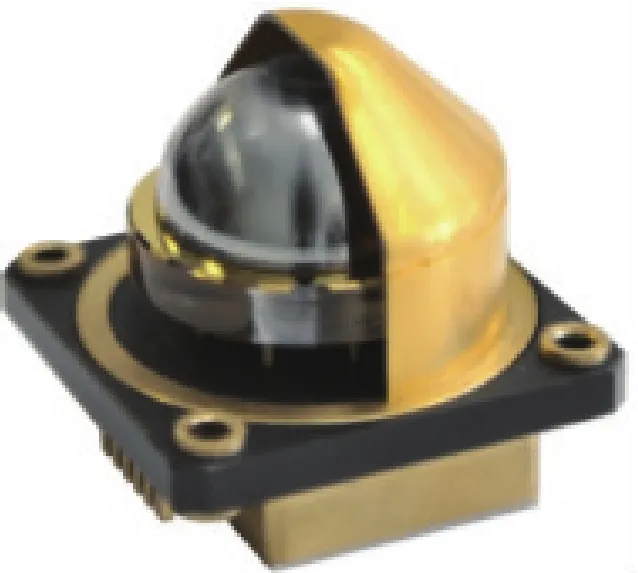
图10 半球谐振陀螺结构图Fig.10 Structure of HRG
4.2 国内研究情况
国内对半球谐振陀螺的研制起步比较晚,中电26所从20世纪90年代初开始研制,经过20多年的研究,已能够生产出满足卫星应用的半球谐振陀螺,精度可达 0.02(°)/h。2012年,国产半球谐振陀螺已应用在在轨运行的空间卫星上,如图11所示。

图11 国内HRG陀螺的应用Fig.11 Domestic HRG application
5 半球谐振陀螺技术发展趋势
从国外半球谐振陀螺的技术应用来看,未来陀螺将以HRG和MEMS为主,并作为空间应用和战略领域等高价值任务的首选产品。未来半球谐振陀螺的发展趋势为:
1)高精度。国外半球谐振陀螺精度达到万分之一度以内,国内差距尚远,还有很大提升空间。法国Sagem公司Φ30mm的半球谐振陀螺精度达到 0.005(°)/h, 美国 Northrop Grumman 公司2012年研制Φ35mm半球陀螺 (mHRG)精度达到0.00035(°)/h。
2)小型化。美国半球谐振陀螺的直径尺寸从Φ90mm逐渐减小至Φ45mm、Φ30mm、Φ25.4mm等,现有资料显示,美国已经开始着手研制超微型半球谐振陀螺(μHRG)。
3)产品化、系列化。Sagem公司年产半球谐振陀螺5000只,广泛用于船用罗经、陆地导航、机载设备、空间导航领域,而国内对于半球谐振陀螺的研究比较单一,没有形成产品化。
6 结论
半球谐振陀螺以其结构简单、高可靠、长寿命、高精度等显著特点,是继光学陀螺之后的重点研究方向之一,具有广阔的应用前景。国外应用证明在空间领域具有绝对的技术优势,是高价值导航领域优选产品,并且国外在产品化、系列化应用中处于领先水平。国内在半球谐振陀螺研究上取得阶段性成果,但仍不能适应型号产品需求,仍要加强制造工艺研究,提高精度,提升产品化水平,力争实现国产化应用。
[1]高胜利,吴简彤.半球谐振陀螺的漂移机理及其控制[J].弹箭与制导学报, 2008, 28 (3): 61-64.GAO Sheng-li, WU Jian-tong.Drift mechanisms& control of hemispherical resonant gyro[J].Journal of Projectiles,Rockets, Missiles and Guidance, 2008, 28 (3): 61-64.
[2]郭栓运,于集建.半球谐振陀螺的关键技术——信号闭环检测理论及电路[J].应用光学,1994, 15 (5):45-49.GUO Shuan-yun,YU Ji-jian.The key technique of hemispherical resonator gyro—the closed loop checking theory of signal and its circuit[J].Journal of Applied Optics,1994, 15 (5): 45-49.
[3]Burrough E, Lee A.In-flight characterization of cassini inertial reference units[C].AIAA Guidance, Navigation and Control Conference& Exhibit,2007.
[4]樊尚春,刘广玉,王振均.半球谐振陀螺的理论与试验研究[J]. 测控技术, 1994, 13 (1): 29-33.FAN Shang-chun, LIU Guang-yu, WANG Zhen-jun.Theory and experiment on hemispherical resonator gyro[J].Measurement & Control Technology, 1994, 13 (1):29-33.
[5]吕志清.哥氏振动陀螺脱颖而出[J].世界产品与技术, 2000 (1): 32-33.LYU Zhi-qing.The gothic vibratory gyroscope stands out[J].Electronic Component News, 2000 (1): 32-33.
[6]刘宇.固态振动陀螺与导航技术[M].北京:中国宇航出版社,2010.LIU Yu.Solid state vibrating gyroscope and navigation technology[M].Beijing: China Aerospace Press, 2010.
[7]Beitia J, Fell C, Okon I, et al.Low cost CVG for highgrade north finders and targeting systems[C].Inertial Sensors& Systems Symposium,2014: 1-15.