基于PR的无刷直流电机控制技术*
2018-06-14陆嘉鑫朱明祥张凯龙包水臣
陆嘉鑫,朱明祥,张凯龙,包水臣
(南京师范大学泰州学院电力工程学院,江苏泰州225300)
1 引言
无刷直流电机(BLDCM)广泛应用于各个领域。理想的BLDCM反电势为120°平顶的梯形波,输入方波电流后可产生恒定转矩,但实际的BLDCM反电势波形不是规则的梯形波,也不是正弦波,其转矩系数随转子位置角的变化而改变,通以方波电流时会产生低频转矩脉动。并且,BLDCM采用两相导通模式控制换相时,存在换相转矩脉动[1]。采用电压空间矢量脉宽调制(SVPWM)策略进行调速控制,具有转矩脉动小和调速范围宽等优点。但是BLDCM在运行过程中电流矢量控制中交叉耦合项无法完全解耦,导致系统控制精度下降,同时也会出现输出转矩脉动的现象。
BLDCM具有较小的转动惯量,因而对电流控制性能要求很高。文献[2]提出采用基于状态反馈的电流预测控制法,可以有效地提高电流环动态性能进行提高输出转矩的稳定性,但缺点是控制器实现起来比较复杂。文献[3]提出了一种比例谐振控制器的改进策略,能够实现对输入信号的无静差跟踪,同时能抑制低次谐波以及指定次谐波的干扰。
本文提出一种基于比例谐振(Proportional Resonant,PR)控制的BLDCM调速方案,与传统电流控制算法相比,前者不含前馈补偿项和解耦项,减少了坐标旋转,进而减小控制算法的实现难度,减小输出转矩脉动。利用MATLAB软件模拟出基于PR控制的BLDCM调速方案的运行状态,验证该方法的正确性与有效性。
2 无刷直流电机数学模型
无刷直流电机(BLDCM)由定子三相绕组、永磁转子、逆变器、转子磁极位置检测器等组成。相关近似等效后,三相定子变量数学模型为[4]-[5]:

式中:ua,ub,uc为定子三相电压;R 为三相绕组电阻;ia,ib,ic为三相电流;p为微分算子;LS为三相定子电感;LM为三相绕组之间互感;ea,eb,ec为三相反电势。
当 ia+ib+ic=0 时,令 L=LS-LM。将其代入式(1),整理得:

电磁转矩方程可表示为:

式中:ω 为 BLDCM 的角速度(rad/s)。
BLDCM反电势为梯形,如图1所示,现以A相反电势ea为例推导三相反电势数学模型:
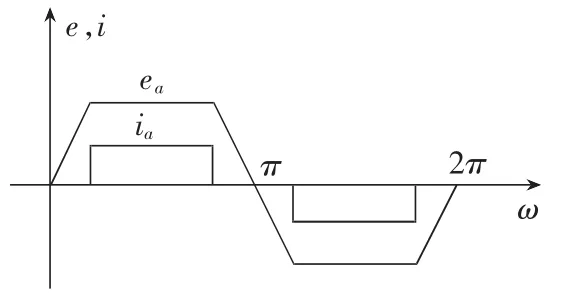
图1 A相反电势和电流波形
式(4)中:ψ(θ)为A相绕组的永磁磁链;θ为转子位置角,如图 2(a)所示;式(5)中:φ(θ)为 A 相绕组磁通;N 为A相绕组匝数;S为绕组在定子内径表面围成的面积;B(x)为沿x轴承梯形分布的转子永磁体径向气隙磁密,B(x)周期为 2π,同时满足 B(x+π)=-B(x)。结合式(4)、(5)可得:

式中:ωr为转子角速度;ψm=2NSBm,为A相绕组磁链幅值;fa(x)=B(x+π/2)为A相幅值为1的单位反电势。
假设电机气隙磁场为标准的梯形波,平顶宽度为120°,则磁密分布B(x)的具体数学模型为:
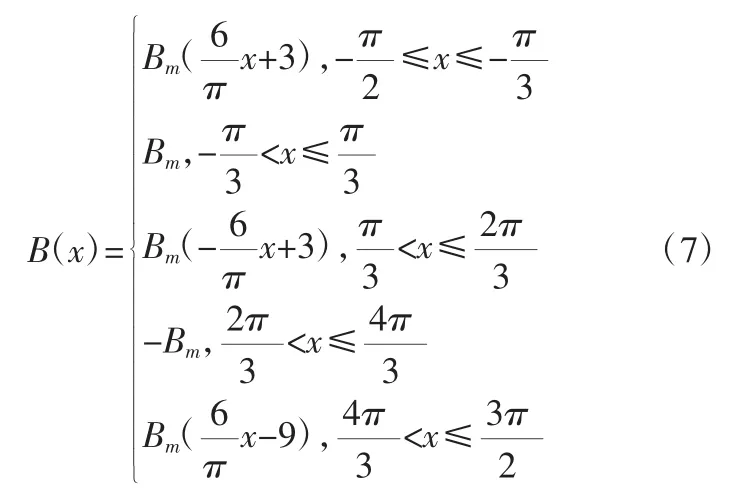
式中:Bm为B(x)磁通分布中120°平顶对应的磁通幅值,具体如图 2(b)所示:
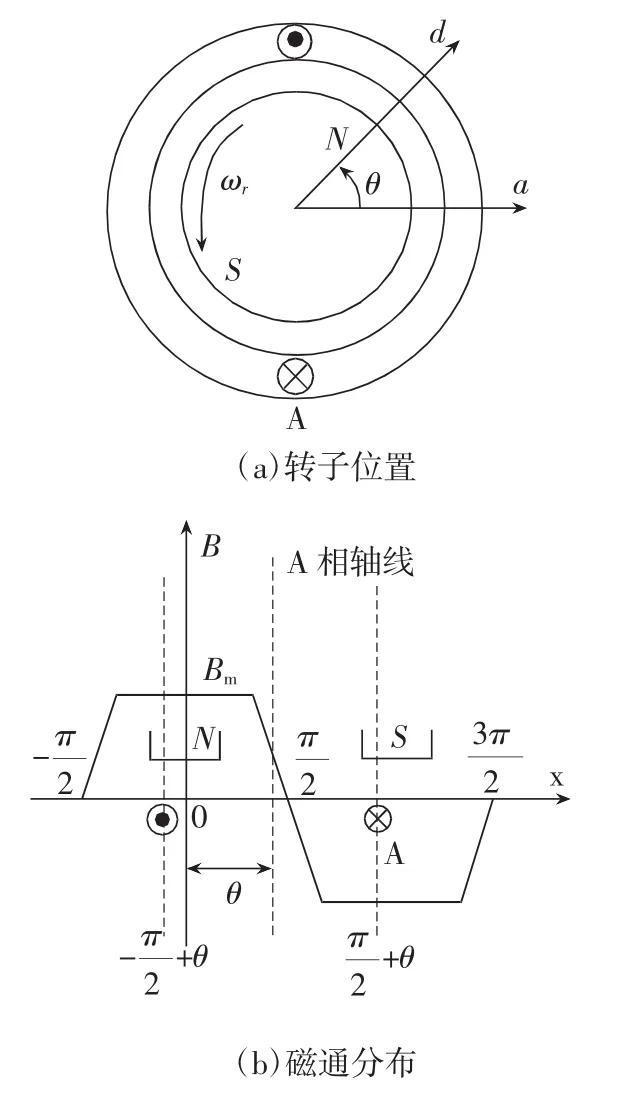
图2 A相绕组位置及磁通分布
同理可得,B相与C相的反电势数学模型为:
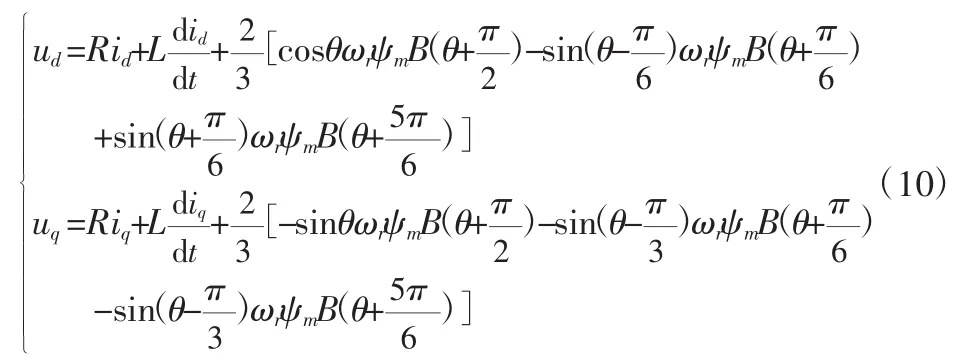
根据Clark和Park变换及其逆变换,可将三相静止坐标系下定子电压变量转换成同步旋转坐标系下的d、q电压分量:
d-q坐标系下转矩公式为:

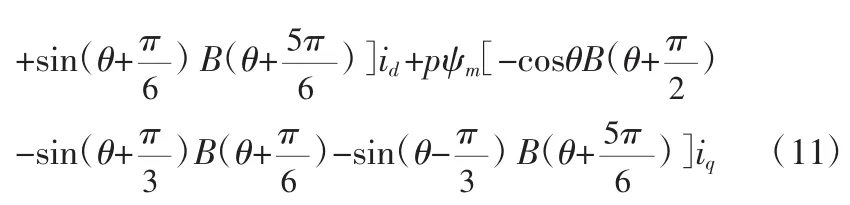
上式即为BLDCM在矢量控制下的转矩公式,比常规的永磁同步电机矢量控制的转矩公式更加复杂。在矢量控制系统中,若采用id=0的控制方式,上式可化简为:
3 比例谐振控制原理
对控制系统,PI控制器可以实现零稳态误差,其传递函数为[6]:

对被控量为交流信号的控制系统,其同步旋转坐标系下PI等效的比例谐振(PR)控制器传递函数为:

式中:ω0为谐振频率,Kp为比例增益,Ki为积分增益。当给定交流信号的角频率为ω0时,GPR(s)的幅值为:

在实际中,使用一种改进的准PR控制器,其传递函数为:

式中:ωc为准谐振控制的截止频率。
式(14)的传递函数为s函数,采用PR控制对BLDCM系统进行数字控制时,对谐振控制器进行离散化,其实现可以使用双线性变换,公式为:

将式(17)代入式(14),可得:

式(17)中:Ts为采样周期,式(18)中:

整理后得到控制器的差分方程为:

4 永磁无刷直流电机系统设计
4.1 比例谐振控制器框图
由式(19)的差分方程可建立系统控制框图中的比例谐振控制器,其MATLAB实现框图如图3所示。
该框图中,b0、b1、b2、a1和 a2的值与表达式已给出,其中ωe为电机机械角速度,其与谐振频率一致;error为两相静止坐标系下的定子电流分量的给定值和与测量值iα和iβ进行做差比较的结果,该框图的输出可对电流进行接近无差的跟踪调节。图中z-1为延迟(delay)环节,可将输入信号延时一个采样周期再进行输出;z-2也是延迟(delay)环节,其将输入信号延时两个采样周期再进行输出。
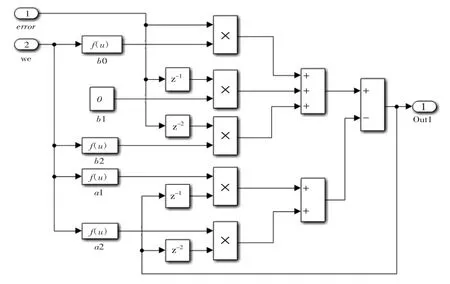
图3 谐振控制器框图
4.2 比例谐振控制系统框图
本文设计一种基于PR控制器的BLDCM矢量控制策略,其系统控制框图如图4所示。
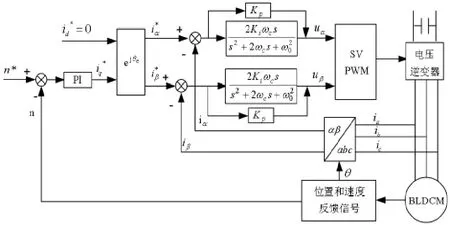
图4 基于PR控制器的无刷直流电机系统控制框图
对比传统PI控制方法可以看出,基于PR控制器的控制系统不含与电机参数有关的前馈补偿项和解耦项,减小控制算法实现的难度,提高控制系统的鲁棒性。
5 比例谐振控制系统仿真分析
利用MATLAB建立无刷直流电机控制系统的仿真模型[7]。采用基于比例谐振控制策略进行矢量控制。仿真时间设置为 0.1s,系统采样时间设置为 0.00001s,电机和实验的参数见表1。
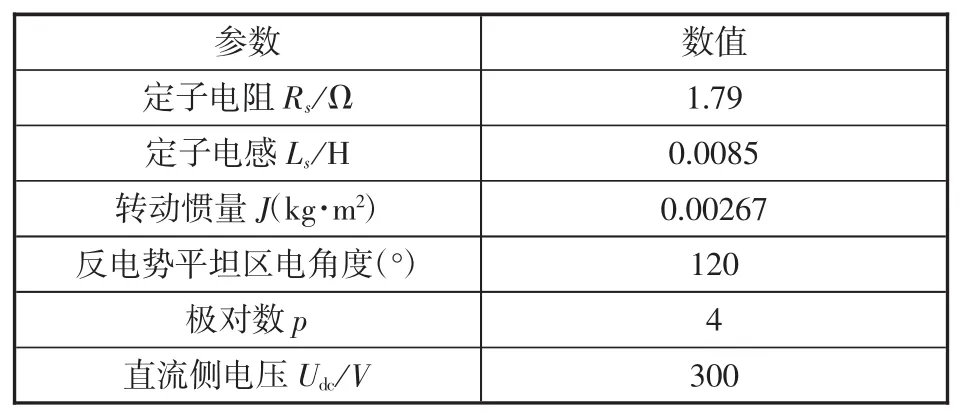
表1 无刷直流电机模型和实验参数
5.1 实验一:输出转矩稳定性实验
此实验的主要目的是将本文所提出的比例谐振控制策略与传统PI调节器控制策略进行对比,来验证比例谐振控制策略的输出转矩稳定性。
此实验中,两个策略都进行了0.1s的仿真。第一次进行传统PI调节器控制策略调速方案,在t=0s时,给定负载转矩为0,即让电主轴空载启动运行,给定转速为1500r/min。当转速稳定之后,输出转矩为0,但其稳定时输出转矩抖动较大且抖动频率较高,说明该策略在稳态运行时,电机输出转矩不够稳定。第二次进行比例谐振控制策略,在t=0s时,给定负载转矩为0N·m,给定转速为1500r/min,当电机转速稳定后,其输出转矩为0,转矩波动明显减小。之后进行带负载的实验,实验给定数据同前两次所述,在t=0.05s时给定负载转矩 11 N·m,电机的电磁转矩在 t=0.05s时,增加到11N·m,并且基于比例谐振控制策略的输出转矩比传统PI调节器控制策略输出转矩稳定。此实验说明:基于比例谐振控制策略的方案在输出转矩稳定性上,无论是空载运行还是带负载运行,都要优于传统PI调节器控制策略。基于传统PI调节器控制的无刷直流电机的调速策略空载输出转矩如图5所示,带负载时的输出转矩如图7所示,其局部放大图如图8所示;基于比例谐振控制的无刷直流电机调速策略空载输出转矩如图6所示,带负载时的输出转矩如图9所示,其局部放大如图10所示。
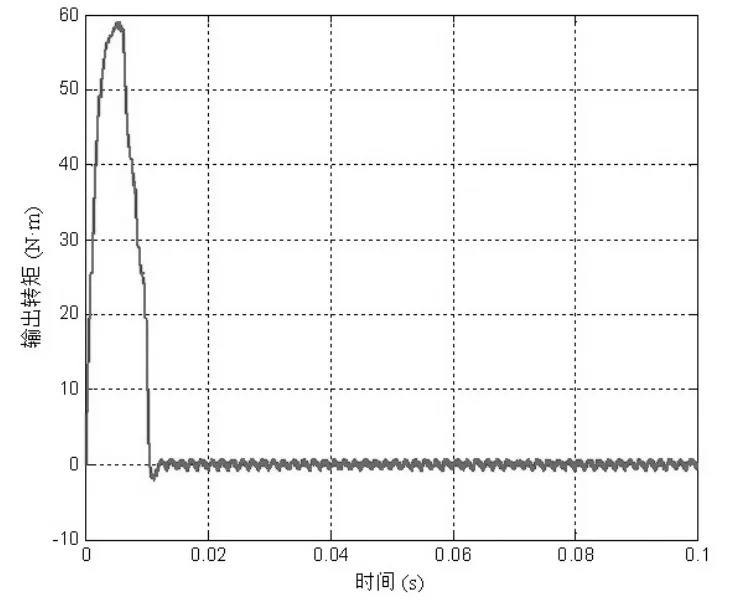
图5 传统PI调节器控制空载输出转矩图
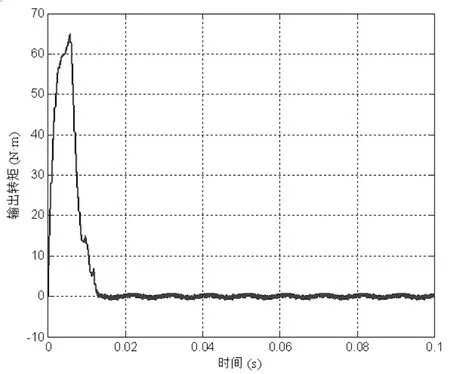
图6 比例谐振控制空载输出转矩图
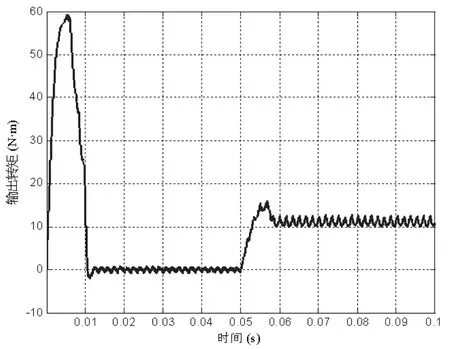
图7 传统PI调节器控制带载输出转矩图
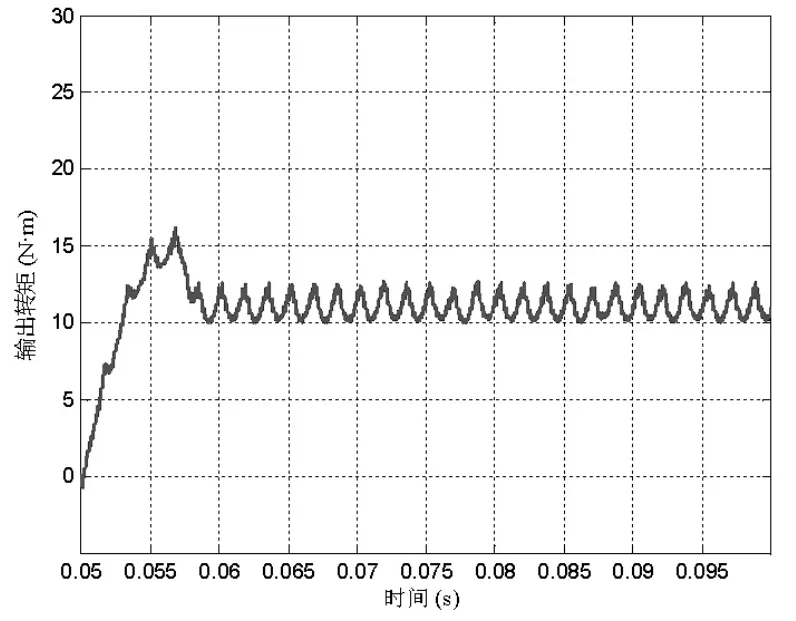
图8 传统PI控制局部放大图
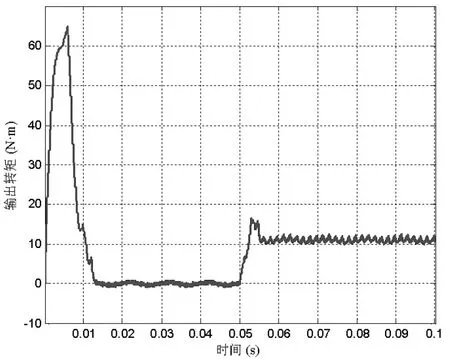
图9 比例谐振控制带载输出转矩图
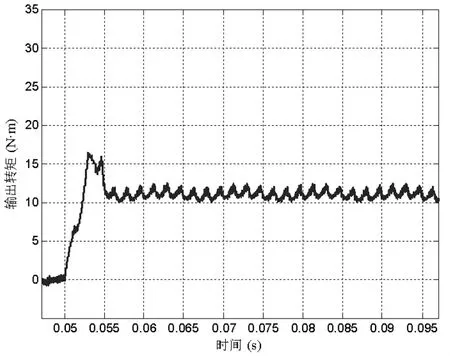
图10 比例谐振控制局部放大图
5.2 实验二:带负载实验
此实验的主要目的是将本文所提出的比例谐振控制策略与传统PI调节器控制策略进行对比,来验证比例谐振控制策略在带负载时的转速跟踪性能。
此实验中,首先对传统PI调节器控制策略进行实验。在 t=0s时,给定转速为 1500r/min,在 t=0.5s时,给定负载转矩11N·m,当转速再次稳定时,其稳态转速已经无法达到给定转速。第二次进行比例谐振控制策略的实验,初始条件同前所述,由实验结果可知,在此实验中两种策略的上升时间基本一致,且都基本无超调。当t=0.5s时加上负载重新进入稳定的过程中,比例谐振控制策略在t=0.055s时就恢复再次达到给定转速,而传统PI调节器在t=0.057s才再次达到稳态转速,故前者能更快的进入稳定运行,相比于传统PI调节器,前者能对转速实现无差调节,而后者在稳态时,转速产生跌落,已无法达到给定转速。并且后者的电流谐波总量(THD)为 80.79%,前者的 THD 为 64.72%,前者也明显优于后者,减小THD也有利于增强电机的带负载能力。
两控制策略的输出转速响应如图11所示,转速局部放大如图12所示。
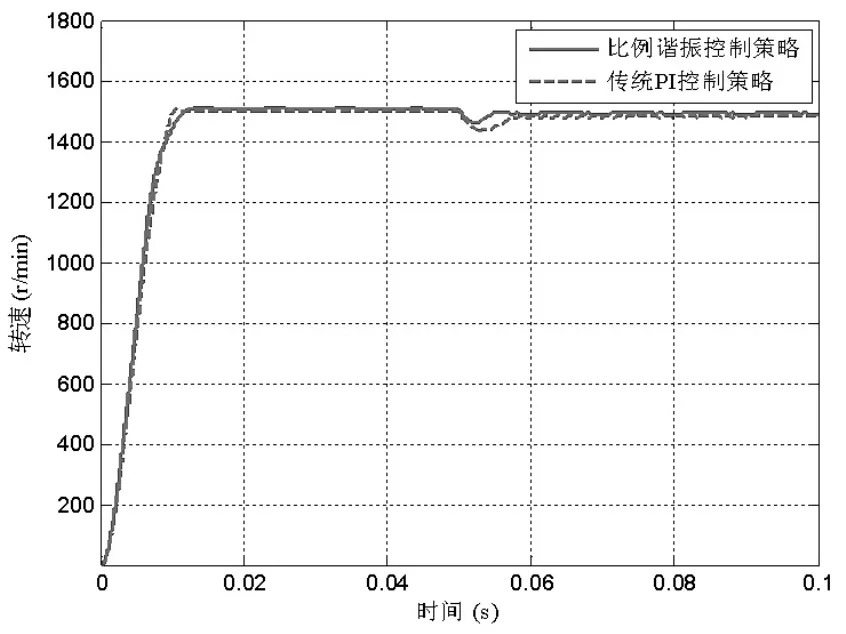
图11 转速响应图
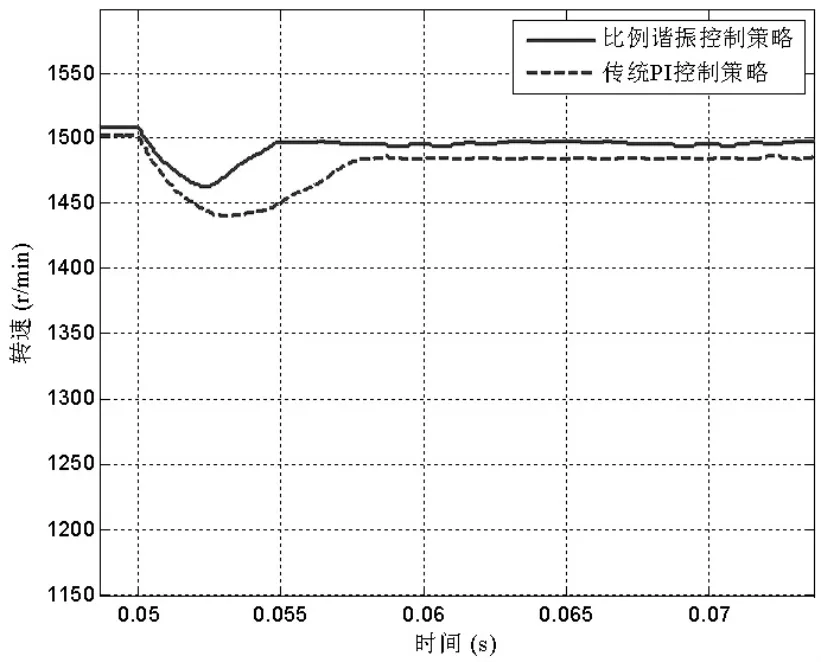
图12 转速响应局部放大图
由上述两个实验可得,采用基于比例谐振控制策略的无刷直流电机调速方案相较于传统PI调节器控制方案能使电机达到稳态时,输出转矩更稳定。同时在电机带负载时,前者能无静差的跟踪转速给定值,而后者已经无法实现无静差调速,稳态精度没有本文所提出的方案高,并且前者具有更小的电流谐波总量(THD)。
6 结束语
本文针对无刷直流电机输出转矩抖动和带负载能力不强等现象,提出了一种基于比例谐振控制的无刷直流电机调速方案。采用该策略控制电机在稳态运行时,输出转矩具有更小的抖动频率,同时还能在带负载的情况下,实现无静差调速。实验结果也表明,在将系统的电流环调节器替换为PR控制器的情况下,电机的输出转矩抖动明显减小;同时在带负载能力上,基于比例谐振控制的方案也优于传统PI调节器控制方案,能够实现电机转速的稳态无误差的快速跟踪。因此,无刷直流电机采用基于比例谐振控制的调速方法既提高了输出转矩的稳定性,也增强了系统的带负载能力,仿真结果证明了其可行性与有效性。