无码变频钻井泵及其控制系统研究
2018-06-14龚治滨杨砚杭陈湘陵朱奇先
龚治滨,杨砚杭,陈湘陵,朱奇先
(1.渤海钻探第五钻井公司,河北河间062450;2.中国石油渤海钻探第四钻井公司,河北任丘062550;3.西部钻探克拉玛依钻井公司,新疆克拉玛依834009;4.天水电气传动研究所有限责任公司,甘肃天水741020)
1 引言
钻井泵为钻机的必配装备,常规变频钻机配置中,泥浆泵大多是由单台变频器拖动,采用无编码器速度控制。从控制结构上来说简单、方便。但随着钻井泵功率的增加,在综合考虑成本、性价比等因素下,选择两台变频器来拖动是比较好的解决方案。本文就钻井泵电机及其拖动装置的选择原则以及在控制方法上应注意的几个问题进行论述,以供相关人员参考。
2 钻井泵
钻井泵种类较多,功率等级的规格也很多,对不同的钻机和钻井要求有不同的配置。4000m以上的变频钻机大多配置 2 台或更多的 F-1600/1600L/1600HL 型钻井泵[1],其技术参数见表 1、2[2]。
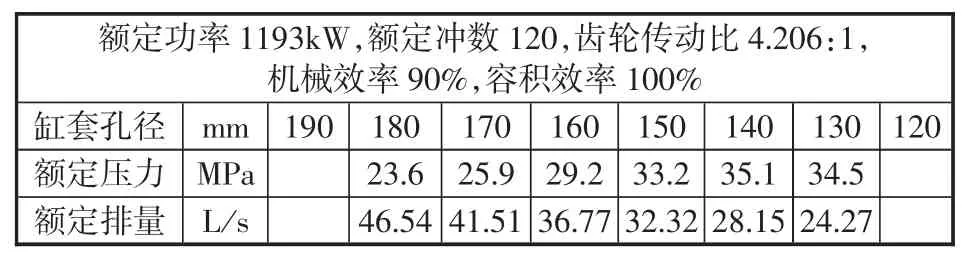
表1 F-1600/1600L 钻井泵技术参数

表2 F-1600HL钻井泵技术参数
3 电机及变频装置选型
钻井泵的输出功率P2由下式计算:

与其输入功率P1之间的关系为:
其中 p 为额定压力 MPa,Q 为排量 L/s,η2为容积效率,在上述钻井泵中 η2=0.9。对应 F-1600L,F-1600HL,在同一传动比和额定120冲时,其输出功率对比见表3.
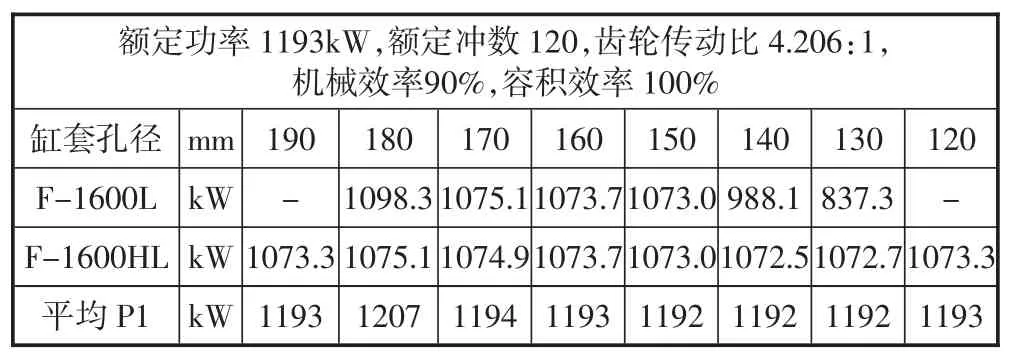
表3 F-1600L/HL 输出功率对比
由上表计算可见,钻井泵的额定功率指其输入功率,只要输入功率相同,无论高低压泵,需要拖动电机的功率是相同的。因此拖动电机选型的第一个要求,是额定输出功率应不小于钻井泵的输入功率。其次需要确定电机的额定速度。对于钻井泵,根据额定冲数n3、齿轮传动比i可以计算输入转速n2为:

对于直驱钻井泵,这个速度就是电机的额定输出速度,对应的直驱扭矩T2为:

对于通过皮带驱动的钻井泵,需要根据皮带的规格以及拖动电机的安装位置确定电机的额定速度,当确定电机的额定速度n1为1000rpm时,需要的额定扭矩为:

此时的皮带传动比为:

由于在确定的额定电机速度(对应额定电压)下,扭矩与输入电流成比例,而输入电流须由变频装置提供,因此过高的扭矩要求不利于变频装置和电缆的选择,推荐在相同功率下,尽量选用高速电机。例如当电机的额定速度选为1500rpm时,需要的额定扭矩为:

皮带传动比为:

两相比较,后一种更容易选择变频装置,但后一种变比能否实现,则取决于从电机输出轴到钻井泵输入轴之间变比的合理匹配。对于功率因数 cosφ=0.88,传输效率 η1=0.95 的常规单机变频电机来说,需要的额定输入电流(额定输入电压U1=600V)I1为:

亦即变频装置最小的额定输出电流;对于双机拖动的变频装置,单台装置的额定输出电流为总电流一半再加5%。综上所述,拖动电机功率的选择根据钻井泵功率,速度取决于直驱还是间驱;根据确定的电机速度(对应电压/频率)和传输效率及功率因数选择变频装置的额定输出电流和恒功率V/f点。
4 控制方式
钻井泵为钻机工作时提供稳定的具有一定压力的泥浆流量,对其输出特性的要求为:在设定的冲数下,能够自动、快速地抗扰泥浆压力变化而保持冲数不变。与此对应,变频装置应运行在恒转矩变速控制模式上,即转矩内环和转速外环的双闭环无差控制,内环的转矩给定来自转速外环的输出,转矩实际值通过检测电机实际扭矩获取;外环的速度给定来自工作指令,速度实际值通过检测电机的实际速度获取;内外环控制器均采用比例(P)积分(I)无差调节器。这些功能要求在变频器上属于标准配置,只须正确使用即可。电机实际扭矩(对应泥浆压力)的获取方法很多,普遍的做法的是通过检测变频器输出电流根据算法模型间接获取,精度很高,已可满足使用要求;需要注意的是实际速度的获取方式,虽然采用速度编码器直接测量最为准确,但考虑到钻机工作的实际环境以及其他方面的要求,这种方式实际不易实施,不如采用间接计算获取更为实用可靠。总之在实际应用中,绝大多采用的是无速度编码器的矢量或者转矩控制模式,基本能够完全满足钻井泵的要求。
5 存在问题及解决措施
5.1 静态扭矩
采用上述控制方式,当设定速度低于参考额定频率的5%以下时,速度闭环自动切换到开环方式,控制性能下降,电机处于不受控制的抖动状态,忽而正传,忽而反转。给定零泵冲换钻杆即是这种工况。为避免这种情况产生意外后果,通常用增大静态输出扭矩进行抑制,为使抑制效果明显,变频器一般对此设置较高,默认为额定扭矩的80%甚至更高。但在上述工况下,这种设置将使变频器工作状况随时间的延长严重恶化,而时间的长短决定于换钻杆时的钻井工艺,最长可能到10min~30min。这将导致功率器件IGBT或IGCT严重过热、极易损坏,可能会大幅增加运行成本,影响钻井效率!解决方法是规定操作程序,换杆时必须停机;同时压低静态扭矩设置到额定的30%或以下。
5.2 扭矩均衡
当用双机双变频器拖动时,无论转矩控制还是矢量控制,均以准确的转子转速为基准,辅以合理的主从控制结构,很容易做到双机间扭矩均衡,转速稳定。以编码器检测实际速度的话,这个设想的实现非常容易。对于无测速编码器情况,转子位置和速度计算没有了共同的基础,加上双机间调节过程不可能完全同步,最终结果将使两机间在同一转速下扭矩大小相差悬殊,甚至方向相反,造成轴上扭矩处于振荡状态。扭矩对时间的积分形成转速,因此振荡的扭矩必然导致振荡的转速,使钻井泵无法正常工作。为解决这个问题,采取的第一个措施是两机间控制结构上相互独立,每机V/f控制。试验的结果为速度扭矩同时振荡,而且随着泵压负载的增大振动加剧直至变频器故障停机;在第一个措施上加强联系,增加主从控制通道,各机仍然采用V/f控制,经过试验,效果没有改观;再在第二方案上将控制器改为比例调节,经过试验,可以同步运行,扭矩有小幅震荡,但在泵负载增加时,泵冲下降明显,负载变化时,泵冲达到稳定过程的时间相当长,这种情况在实际上无法使用。经过对变频器控制过程和故障现象的深入分析,大体上找到了问题所在。原来变频器在调节运算中,始终监视设定速度和实际速度,正常工作时,由于数字运算速度很快,在外部机电大惯性时间常数下,速度设定基本上等于实际速度,两者相差很小。当产生扭矩振荡时,电流变化剧烈,以此为输入快速计算出的速度与电流同步的剧烈变化,振荡幅度和持续时间远远超过了允许的最大范围,变频器为保护自身和相关设备,必然要做出故障停机动作。为消除这个问题,经过进一步分析发现,造成扭矩振荡的原因是速度调节器的输出,扭矩调节器的输入,关键是其中的积分量增大过快,实际速度由于要经过大惯性的机电时间延迟后才反映到转速上,而调节器按照固有的运算速度很快的输出了要求加速的扭矩,综合后必然使调节器振荡。如果将快速增长的积分量的一部分作为速度调节器的反向信号输入到速度调节器,将抵消一部分加速扭矩及其快速变化,进而消除振荡。因此以主从控制结构,用速度调节器部分积分量反向叠加组成的双环控制系统,经过现场实际验证,取得了两机速度平稳,扭矩相差最大在额定的5%以下的优良性能指标,完全达到了实际现场的使用要求!
6 结束语
变频泥浆泵配置电机时,只要输入功率确定,没有高压泵和低压泵区分,需要的拖动电机功率相同;在确定的功率下,高速电机比低速电机取用的电流小,较小的电流易于选用变频器和传输电缆;控制结构一般为无测速传感器的转速扭矩双闭环无差恒转矩控制系统;在使用中要尽量避免5%额定速度以下的区段;对于双机拖动同一硬性连接轴的应用,除去用在5%额定速度以下区段外,还须采用主从控制结构以保证扭矩均衡,同时还要采取措施降低加速扭矩,设法使双机间扭矩误差在设定范围内。做好以上工作后,双机拖动的无编码器钻井泵性能完全可以和有编码器的相媲美,并且更为可靠、易用!