基于三角边长关系式的曲线弯桥上构爬移监测方法
2018-06-14郝天之毛志刚刘诗媛
郝天之,毛志刚,刘诗媛
(1.广西交通科学研究院有限公司,广西 南宁 530007;2.柳州欧维姆工程机械股份有限公司,广西 柳州 545005;3.广西大学土木建筑工程学院,广西 南宁 530004)
0 引言

杜涛通过对津保南线胜利大桥弯箱梁“爬移”现象机理的分析,指出该弯梁桥产生“爬移”的根本原因可归纳为三个方面:(1)温度力的作用;(2)施工及运营造成的原因;(3)支承体系设计不合理[5]。李民通过对十一经路、顺驰桥和民权门立交桥三座桥梁的病害案例进行研究,采用通用有限元分析程序进行分析计算的操作,对比分析了当箱梁承受制动力、温度应力、离心力等外界受力和材质、施工及预应力改变等内因变化的情况下产生的规律,研究并设计纠偏加固技术和多项抗偏移扭转措施,以达到旧桥治理的目的[6]。韩宗泽通过对梁体偏移、桥面横坡发生变化的原因进行研究,介绍了对梁体进行纠偏和调整梁体姿态,恢复并保持梁体最小次应力状态的施工方法[7]。刘华通过润扬长江公路大桥世业洲互通匝道桥,对预应力混凝土连续弯箱梁桥的侧向位移问题进行了比较系统的研究。研究表明,弯梁桥的“爬移”现象与弯梁桥支座的横向推力、竖向拉反力的出现和梁桥自身的弯梁构造形式都密切相关[8]。涂慧敏对近几年来弯梁桥发生的滑移(爬移)翻转问题工程实例进行分析,并通过有限元分析软件Midas/Civil进行跨径相同、曲率半径不同情况下的弯箱梁桥支座内力和梁体位移分析,并讨论了在实际工程当中出现该问题的解决措施和办法[9]。徐毅指出依托工程曲线连续箱梁桥产生曲线外侧径向偏位是各种效应相互作用并随着时间不断累积的结果,运营阶段的车辆荷载和伸缩缝填塞后的温度作用是导致该曲线连续箱梁桥发生曲线外侧扭转和径向偏位的较大影响因素[10]。
曲线弯桥的爬移,轻则导致梁段伸缩缝的剪切破坏,影响其使用寿命,重则会出现支承结构破坏、梁体滑移和翻转。桥梁在使用过程若出现该类问题,不仅影响交通,而且加固起来非常困难,可能会造成巨大的人员伤亡和财产经济损失。
目前,常用的爬移检测方法主要有目测法及全站仪观测法。目测法主要是采用肉眼观测防撞墙的顺直情况、伸缩缝间距及横向错位情况,该方法误差较大、对梁体爬移难以精确定量,观测人员要走上桥面观测,对繁忙的城市桥梁交通有一定影响,且繁忙的车流使观测工作员的人身安全面临危险;全站仪观测法需在桥面或梁底边缘设置观测点或观测标志,观测站一般设置在周围的楼顶或可以通视地面的位置,采用强制对中装置,测量工作周期相对较长,爬移测量精度低且不能做到实时动态观测。因此,至今还没有针对曲线弯桥的爬移的自动观测、监测方法,所以在桥梁健康监控、检测领域急需一种精度高、自动化、实时动态的曲线弯桥爬移监测方法,为此本文提出基于三角边长关系解析式的桥梁爬移监测方法。
1 基于三角边长关系式的爬移监测算法
本文主要提出了一种自动化程度高、实时动态、精度较高的曲线连续箱梁爬移自动监测方法,以实现箱梁纵、横向位移的自动监测,便于判别桥梁结构健康状况及结构安全。
该方法主要包括以下几个步骤[12-13]:
(1)在墩顶的梁底或曲率半径较小连续梁、曲直梁接合处的端底部梁底固定安装位移传感器底座A。
(2)在墩顶支座垫石或参照的梁端底部固定安装位移传感器底座B和C,底座B和C中心连线的延长线垂直于曲线梁中心线,底座A、B、C任意两个中心间距均为250~400 mm,且底座A、B、C中心连线为锐角三角形。
(3)底座A、B及底座A、C之间分别安装位移传感器SB和SC,并调整位移传感器的初始位置处于量程的中间位置。
(4)采用游标卡尺测量底座B和C、A和C、A和B固定轴的中心间距LBC、LAC、LAB。
(5)位移传感器接入采集器,设置初始零点及采样时间间隔,如下页图1所示。

图1 基于三角边长变化位移关系式图
(6)采用公式计算出爬移量,公式为:
(1)
或
(2)
式中,Δx正号表示A点向x轴的负方向移动,负号表示A点向x轴的正方向移动;式2中,Δx正号表示A点向x轴的正方向移动,负号表示A点向x轴的负方向移动。
(3)
或
(4)
式中,Δy正号表示A点平行于y轴正方移动,负号表示A点平行于y轴负方向移动。
则
(5)
式中,s表示总爬移量。
(6)
(7)
式中,ΔAB、ΔAC分别表示传感器SB、SC的位移的示值,ΔAB及ΔAC的正号表示传感器被拉伸,负号表示传感器被压缩。
2 基于三角边长关系式的监测装置
传感器底座具有可供传感器的传动杆自由转动的轴,该轴直径D=6~8 mm,该轴与被测梁底面垂直;传感器底座与梁体焊接或钻孔后膨胀螺钉连接。其示意图见图2。
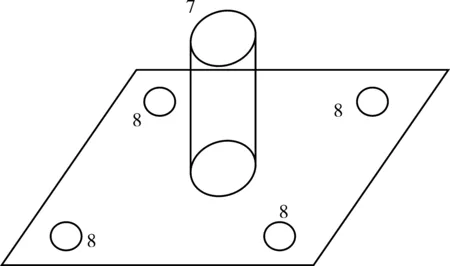
图2 传感器底座结构示意图
位移传感器的传动杆和支撑杆中间位置均有调节伸缩长度调节螺母,传感器的传动杆和支撑杆端部有可绕底座的固定轴和自由转动的铰链,铰链圆孔直径D′=D+0.02 mm,传感器量程为伸缩缝自由伸缩量的2.5倍或预计梁爬移位移量的2.5倍。其示意图见图3。

图3 位移传感器结构示意图
采集器中的数据采用无线网络、传统有线网络或者电力线网络实时传输至服务器;服务器系统采用B/S架构,提供数据存储、数据查询、数据分析、报表浏览等服务,用户通过浏览器访问服务器提供的应用服务功能。
3 应用工程实例
3.1 梁端监测
如图4所示,某曲线连续梁桥,在被测的梁底安装传感器底座A,在参照的梁端底部安装传感器底座2个,底座编号分别为B、C,底座B、底座C中心连线的延长线垂直于曲线梁中心线。底座A、底座B及底座A、底座C之间各安装位移传感器1个,采用游标卡尺测量B、C传感器底座中心间距为LBC=350.77 mm,A、C传感器底座中心间距为LAC=320.98 mm,A、B传感器底座中心距为LAB=340.08 mm。把传感器通过数据线连接至采集器,采集器中的数据采用无线网络实时传输至服务器,服务器利用公式(1)和式(3)计算两个方向的爬移量,测试结果见表1。
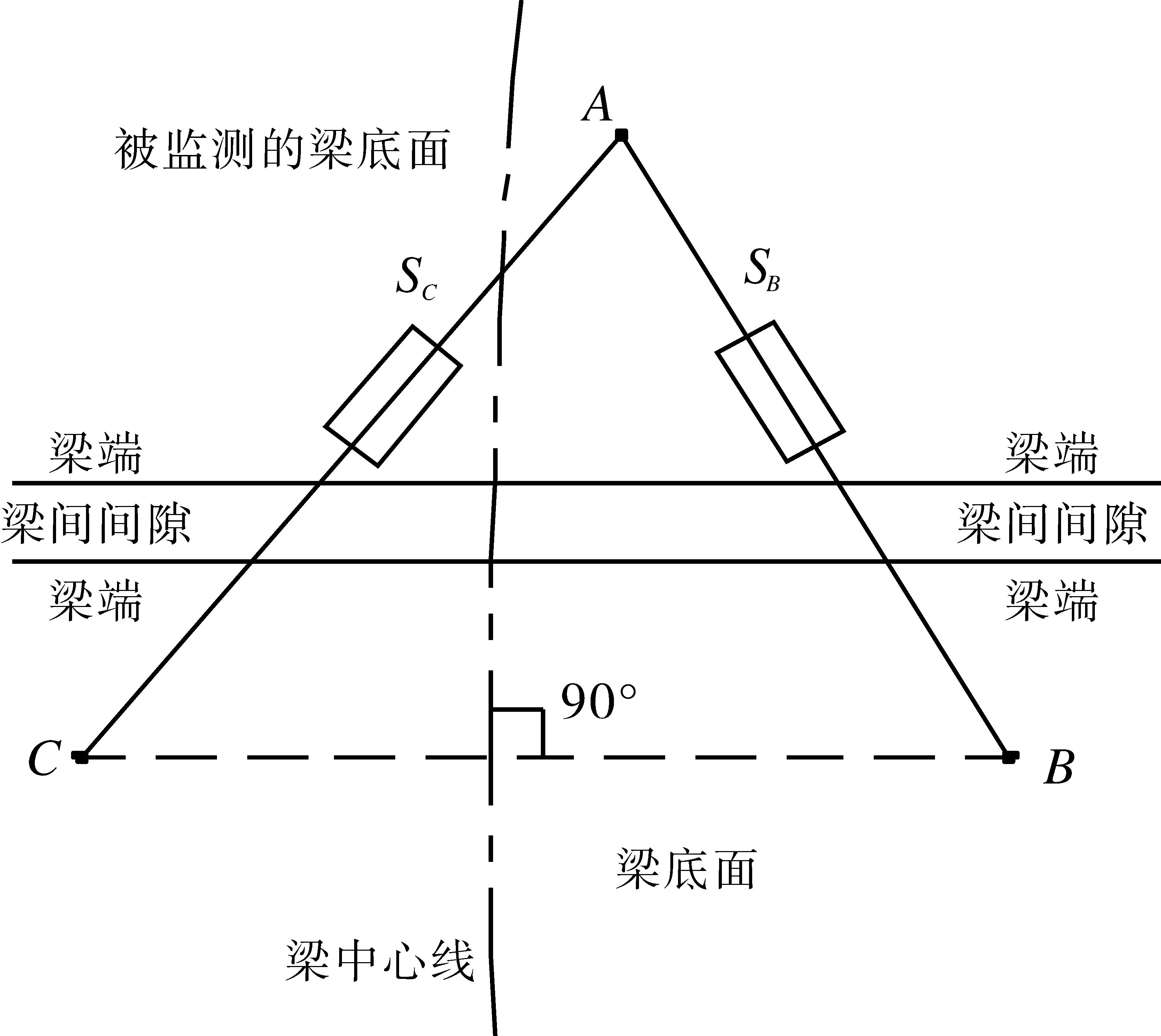
图4 实例1的曲线连续箱梁爬移示意图(梁端底面)
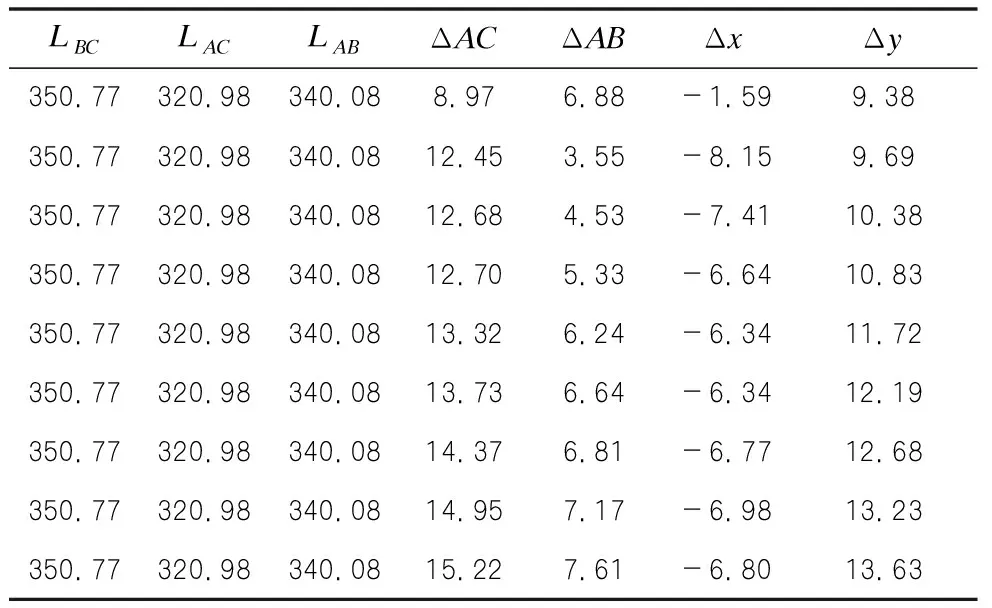
LBCLACLABΔACΔABΔxΔy350.77320.98340.088.976.88-1.599.38350.77320.98340.0812.453.55-8.159.69350.77320.98340.0812.684.53-7.4110.38350.77320.98340.0812.705.33-6.6410.83350.77320.98340.0813.326.24-6.3411.72350.77320.98340.0813.736.64-6.3412.19350.77320.98340.0814.376.81-6.7712.68350.77320.98340.0814.957.17-6.9813.23350.77320.98340.0815.227.61-6.8013.63
3.2 支座监测实例
如图5所示,某曲线连续梁桥,在被测的梁底安装传感器底座A,在支座垫石上安装传感器底座2个,底座编号分别为B、C,B、C底座中心连线的延长线垂直于曲线梁中心线。采用游标卡尺测量B、C传感器底座中心间距为LBC=380.56 mm,A、C传感器底座中心间距为LAC=420.12 mm,A、B传感器底座中心距为LAB=360.48 mm。把传感器通过数据线连接至采集器,采集器中的数据采用有线网络实时传输至服务器,服务器利用式2和式4计算两个方向的爬移量,测试结果见表2。
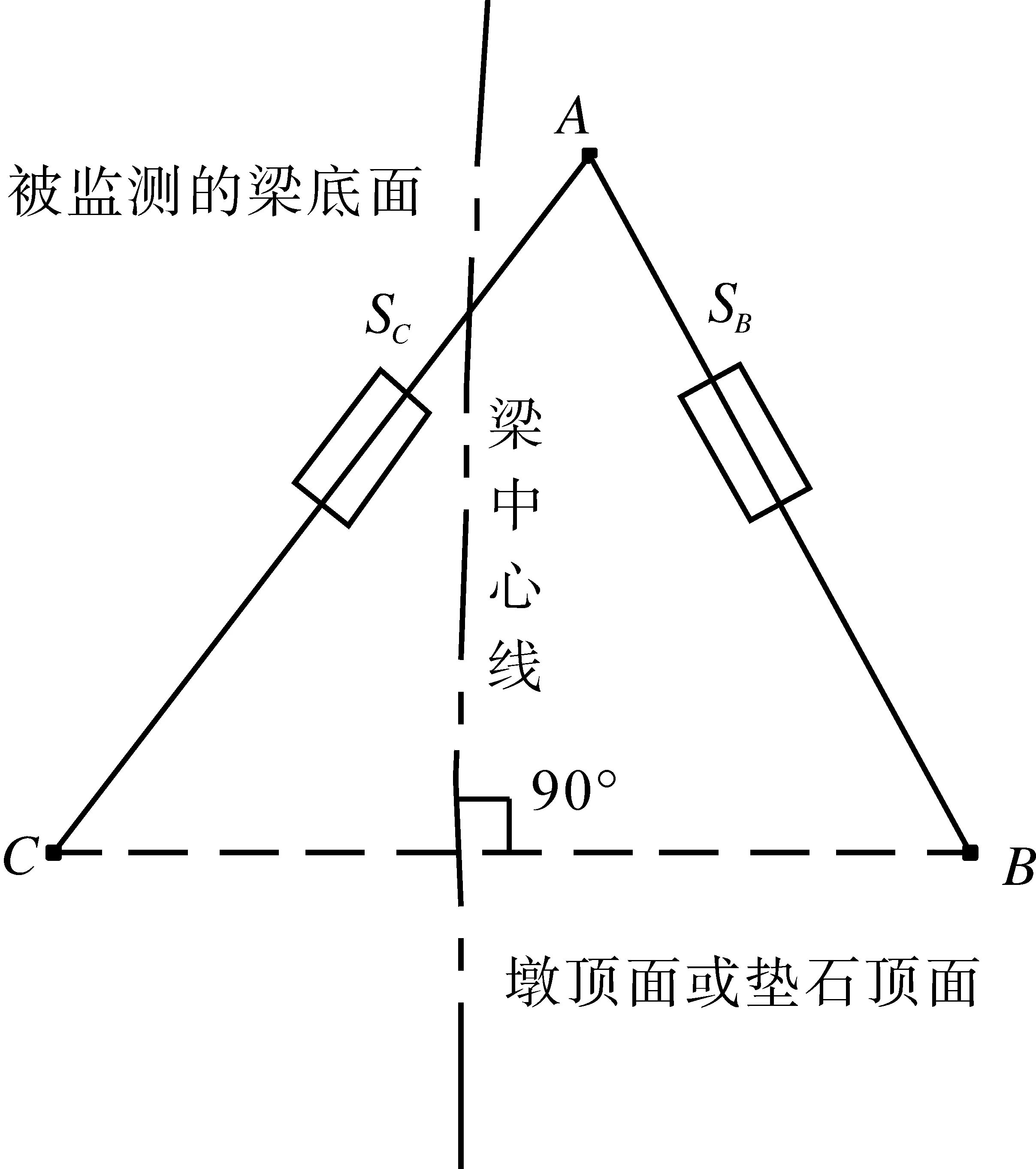
图5 曲线连续箱梁爬移示意图(墩顶面或垫石顶面及梁底面)

LBCLACLABΔACΔABΔxΔy380.56420.12360.483.172.820.833.33380.56420.12360.484.063.251.404.01380.56420.12360.484.773.841.644.73380.56420.12360.484.964.121.595.00380.56420.12360.485.144.501.415.35380.56420.12360.486.125.121.936.20380.56420.12360.486.995.542.496.86380.56420.12360.487.236.152.177.39380.56420.12360.487.386.681.847.83
4 结语
本文针对现有曲线弯桥爬移量测量手段存在的问题,介绍了一种基于三角边长关系解析式的曲线连续箱梁爬移自动监测方法。
(1)利用位移传感器基于三角边长关系经几何推导得到爬移量的计算公式(式1~7)。
(2)根据爬移量计算公式建立了曲线连续箱梁爬移自动监测方法。该法可全天候动态实时了解梁体的爬移情况,监测结果精度比全站仪监测法高,避免了复杂位移中的角度测量精度低、设备昂贵等问题。
(3)本文介绍的方法可应用于桥梁健康监控、检测领域,实现高精度、自动化、实时动态地测量曲线连续梁桥爬移量,以判别桥梁健康状况及结构安全。
[1]刘辉锁,崔克谦,康永臣,等.某大桥温度变形的仿真分析[J].公路,2006(11):111-112.
[2]何柏雷.深圳某立交A匝道桥事故分析[J].城市道桥与防洪,2002(2):39-43.
[3]王新定,丁汉山,吉 林,等.混凝土连续弯桥侧向位移分析及对策研究[J].公路交通科技,2006,11(23):64-67.
[4]胡晓崑,胡雪峰.混凝土连续弯桥支撑体系研究[J].交通科技,2009,234(3):10-13.
[5]杜 涛.津保南线胜利大桥弯箱梁“爬移”现象机理分析[J].交通世界,2013(7):256-257.
[6]李 民.曲线连续箱梁纠偏关键工艺与效益分析[D].天津:天津大学,2014.
[7]韩宗泽.曲线连续箱梁纠偏研究[J].施工技术,2011(240):119-121.
[8]刘 华.预应力混凝土连续弯箱梁的侧向位移研究[D].南京:东南大学,2004.
[9]涂慧敏.预应力混凝土弯箱梁桥“爬移”研究[J].桥梁检测与加固,2008(1):51-53.
[10]徐 毅.预应力曲线连续箱梁桥径向偏位影响因素及其对策研究[D].北京:中国铁道科学研究院,2014.
[11]段晓伟.混凝土曲线连续箱梁桥多因素作用横向位移分析[D].西安:长安大学,2014.
[12]郝天之,邱 波,刘世建,等.曲线连续箱梁爬移自动监测方法[P].中国专利:CN 103557824 A,2014-02-05.
[13]应敬伟,郝天之,杨 涛,等.钢结构焊接收缩变形自动监测方法[P].中国专利:CN103586606A,2014-02-19.
