矩形区域内清扫机器人的运动学分析*
2018-06-14高天兰周颖华
高天兰 周颖华
(1.西南大学附属中学,重庆 400715;2.西南大学电子信息工程学院,重庆 400715)
随着机器人技术的迅猛发展,越来越多的智能机器人产品走进了人们的日常生活[1][2]。一般来说,家庭智能机器人主要分成三种类型:应用型机器人、社交陪伴型机器人以及仿生机器人。应用型机器人的基本功能是自主完成人类所需的家庭作业,如扫地、擦窗等。社交陪伴型机器人的基本功能是能够和人类互相交流,陪伴用户一起成长,如目前已经上市的阿尔法机器人、小优等。仿生机器人,可以模仿人类的两腿运动,完成许多非常复杂的动作(如Asimo机器人);或者根据人类的语言来呈现不同的表情(如美国的索亚菲情感机器人)。目前,由于市场对清扫机器人有巨大的需求潜力,所以不断优化和升级清扫机器人的性能在激烈的市场竞争中显得尤为迫切[3][4]。
清扫机器人需要在特定环境下独立移动并完成清扫任务,这就需要为机器人规划运动路线。目前,针对清扫机器人的路径规划算法,国内外许多学者都进行了大量的研究,并提出了一系列的规划算法。比如:人工势场法[5]、栅格法[6]、快速扩展随机树法(RRT)[7]、遗传算法[8]、蚁群算法[9]、神经网络算法[10][11]等。这些算法都是针对不规则作业区域或者有障碍作业区域而展开的分析,由于考虑的因素过多而不可避免地存在缺点,比如出现死锁现象、搜索时间较长、或者重复作业过多等问题。而对于规则的作业区域,比如住宅的窗玻璃、高层建筑的玻璃幕墙等,人们也设计出了一些专用清扫机器人,如北京航空航天大学机器人研究所开发的蓝天洁士系列机器人[12]。研究表明,当作业区域为规则的平面区域(比如矩形区域)时,可采用简单易行的迂回式路径规划或者回字形路径规划来实现机器人的清扫任务。
本文将为矩形区域内采用迂回式路径规划和回字形路径规划的机器人建立运动学模型,并进行求解。
1 机器人的运动学模型
为了方便,我们首先做如下的基本假设:
(H1)清扫机器人的作业区域是边长分别为A和B的矩形区域;
(H2)清扫机器人底部的有效清扫区域为边长分别为a和b的矩形区域;
(H3)机器人可以原地向左和向右转弯90°;
(H4)机器人在直线运动时保持速度为v0的匀速运动;
(H5)机器人初始位置位于作业区域的左下角,其中心坐标为(a/2,b/2)。
1.1 采用迂回式路径规划机器人的运动学模型

图1 迂回式路径规划示意图

图2 迂回式运动中三个子系统(S1)、(S2)和(S3)的切换规则
采用迂回式路径规划。机器人的运动路线如下:机器人向前行走,到达边界后右转90°;向前行走a/2米,再右转90°;向前行走,到达边界后右转90°;向前行走a/2米,再右转90°。不断循环以上行走路线,迂回地遍历作业区域,如图1所示。
建立如图1所示的坐标系,则机器人在时刻t的位置坐标为(x(t),y(t))。在如上运动路线情况下,机器人的运动方向有三种:向上运动、向下运动、向右运动。三个方向上机器人的运动可分别由下列微分方程描述:

向上运动 向右运动 向下运动dxt dt S dyt v■■■■■ =0()()■ =0■ =■■■■()■■■■0()()1()2()dxt v dt S dyt 3()=-■■dt■■0=■■dt dt =0 dxt dt S dyt v()0
因此,机器人的运动动力学可以建模为由上述三个子系统(S1)、(S2)和(S3)所组成的一个切换系统,其切换规则如图2所示。
1.2 采用回字形路径规划的机器人的运动学模型
采用回字形路径规划。机器人的运动路线如下:机器人向前行走,到达边界后右转90°;向前行走直到另一边界,再右转90°;向前行走,到达距离边界a米后右转90°;向前行走,到达距离边界b米,再右转90°。不断循环以上行走路线,迂回地遍历作业区域,如图2所示。

图3 回字形路径规划示意图

图 4 迂回式运动中四个子系统(D1)、(D2)、(D3)和(D4)的切换规则
在这种情况下,机器人的运动方向有四种:向上运动、向下运动、向左运动、向右运动。为建立数学模型,建立如图3所示的坐标系,则机器人在时刻t的位置坐标为(x(t),y(t))。四个方向上机器人的运动可分别由下列微分方程描述:

向上运动 向右运动 向下运动 向左运动■ =0■■■■()()■=0()dxt dt dyt v dt D1■ =■■■■()()■=0 0( )dxt v dt dyt dt D2■ =0■■■■()=-■dxt dt dyt v dt D3()0( )■ =-■■■■()0()■=0( )dxt v dt dyt dt D4
因此,机器人的运动动力学可以建模为由上述四个子系统(D1)、(D2)、(D3)和(D4)所组成的一个切换系统,其切换规则如图4所示。
2 运动学模型求解
2.1 采用迂回式路径规划的机器人的运动方程求解
为了方便表示,记:0,1t =t =>t =t =。机器人的每一次的向上运动、向右运动、向下运动、向左运动为一个迂回周期。则,容易得到第一个迂回周期内四个阶段的运动方程、初始值以及解析解(见表1),而且易见在第k个迂回周期内,四个阶段的运动方程及其初始值(见表2)。
根据表2中所列的微分方程及相应的初始条件,分别求解四个运动阶段中的运动方程,可以得到如下解析解:

2.2 采用回字形路径规划的机器人的运动方程求解
类似地,机器人的每一次的向上运动、向右运动、向下运动、向左运动视为一个运动周期,容易得到第一个运动周期内四个阶段的运动方程、初始值以及解析解(见表3),而且易见在第k个运动周期内,四个阶段的运动方程及其初始值(见表4)。为了方便表示,记Tk(k = 1 ,2,3,…) 表示机器人在第k个运动周期所花费的时间,则:


表1 在第一个迂回周期内,四个阶段的运动方程及其初始值和解析解

表2 在第k个迂回周期内,四个阶段的运动方程及其初始值( k = 1 ,2,3,…)
根据表4中所列的初始条件,分别求解四个运动阶段中的运动方程,可以得到如下解析解:
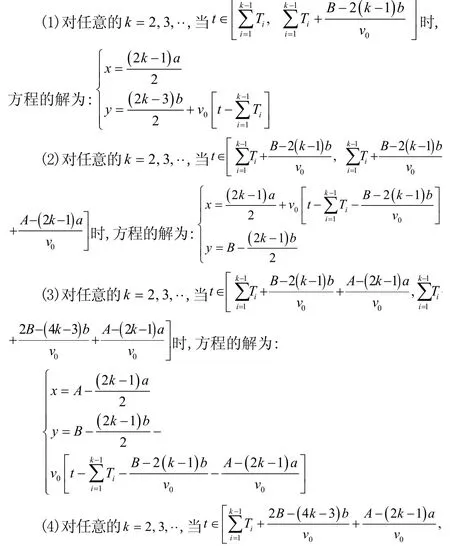


表3 在第一个运动周期内,四个阶段的运动方程及其初始值和解析解
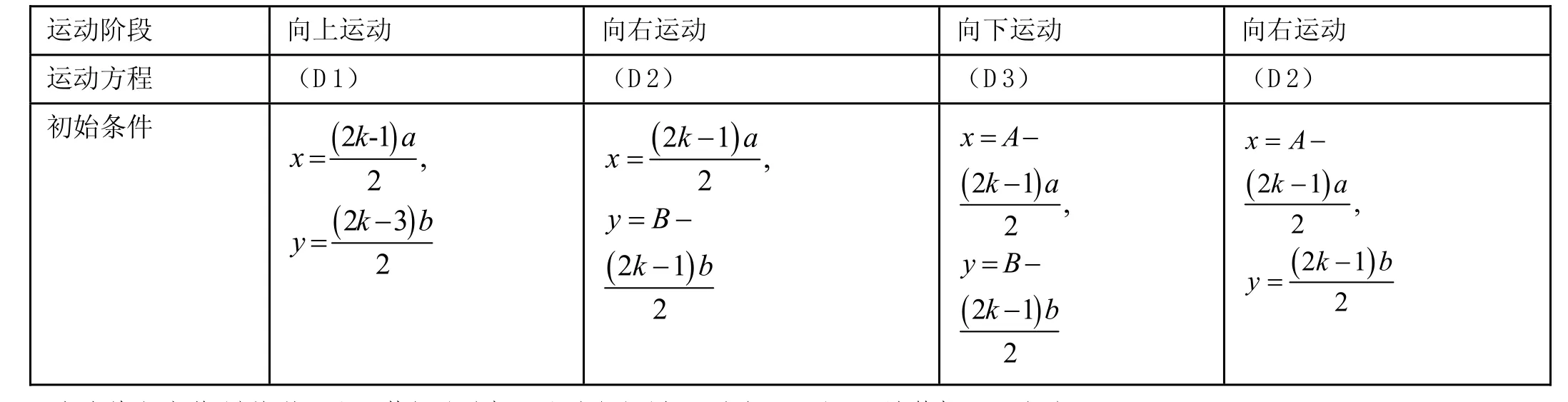
表4 在第k个运动周期内,四个阶段的运动方程及其初始值( k = 2,3,…)
3 结语与讨论
自动清扫机器人是当今应用型机器人领域的热门产品。随着消费者对其智能化和多功能化要求越来越来高,这种机器人的结构和功能也在不断地进化和升级。其中,消费者关注机器人的智能性主要集中于机器人的遍历性、低重复性以及避障性能。从技术层面上看,这些智能性在很大程度上依赖于机器人的路径规划算法。本文对无障矩形区域的迂回式路径规划以及回字形路径规划算法进行了数学建模,分别得到了由四个子系统组成的切换微分系统,并给出了它们的解析解。在实际的应用中,机器人的位置可以通过深度照相机等技术获得,而机器人期望轨迹可通过实际环境中路标的真实布局加以设计,进而提高本文方法的普适性。
[1]杨炽.走入家庭的机器人[J].上海科学生活,2003,(5):10-13.
[2]肖婷婷,刘明哲,柳炳琦,王磊,成毅,杨剑波.一种蛇形机器人的结构设计与研制[J].测控技术,2016,35(6):75-78.
[3]梁文莉.竞争激烈的扫地机器人市场[J].机器人技术与应用,2015,(2):21-23.
[4]徐胜华,宋树祥,佘果.一种扫地机器人路径规划的改进算法[J].测控技术,2017,36(2):120-123.
[5]张建英,赵志萍,刘暾.基于人工势场法的机器人路径规划[J].哈尔滨工业大学学报,2006,38.(8):1306-1309.
[6]梁嘉俊,曾碧,何元烈.基于改进势场栅格法的清洁机器人路径规划算法研究[J].广东工业大学学报,2016,33(4):30-36.
[7]冯楠.自主移动机器人路径规划的RRT算法研究[D].大连:大连理工大学硕士学位论文,2014.
[8]郝博,秦丽娟,姜明洋.基于改进遗传算法的移动机器人路径规划方法研究[J].计算机工程与科学,2010,32(7):104-107.
[9]刘锴,游晓明,刘升.复杂环境移动机器人路径规划的改进蚁群算法[J].计算机工程与应用,2016,52(13):60-63.
[10]樊长虹,陈卫东,席裕庚.动态未知环境下一种Hopfield神经网络路径规划方法[J].控制理论与应用,2004,21(3):345-350.
[11]杨志成,冯豫韬,张利霞,齐华山,倪景秀.基于神经网络前馈补偿的欠驱动机器人越障控制[J].测控技术,2017,36(11):89-92.
[12]张厚祥,唐伯雁,王巍,贾明,宗光华.擦窗机器人控制系统研究[J].制造业自动化,2002,24(6):5-9.
