新型养老环境下的药品投送机器人系统①
2018-06-14曹惠茹黄晓锋许建强邵泽宁庄健怡
曹惠茹,黄晓锋,许建强,邵泽宁,庄健怡
(中山大学 南方学院 电气与计算机工程学院,广州 510970)
室内医疗保健系统是完整医疗卫生系统的重要组成部分,近年随着世界人口结构的不断变化,室内医疗保健系统成为西方发达国家研究的热点[1].当前我国60岁以上人口将是全体人口中增长最快的部分,60岁以上老年人口占总人口的比例在本世纪末将由1982年的7.63%上升到10.35%,达到老年型人口结构.预计2020年将达到15.23%,2040年达到24.28%,即达到老龄化高峰阶段[2].与之同时,大多数老年人都患有高血压、糖尿病、脑血栓等常见疾病以及心脏病等突发疾病,需要得到及时地监护.随着我国人民生活水平的提高和信息技术进步,社区、居家养老成为当前有效解决我国社会养老的关键所在.然而由于缺乏资金扶持,人才储备不足、医疗服务管理系统信息化程度低等诸多原因,导致当前我国医疗系统很难满足实际与发展的需求[3].因此急需构建新型室内医疗保健系统与相关设备.
国内外针对上述问题进行了大量研究,Mercuri等人[4]基于嵌入式系统构建了室内摔伤救护系统;通过相关试验证明了方法的可行性.Yu等人[5]设计与实现一种基于室内服务机器人和无线传感器网络的家庭监护系统;试验结果表明室内服务机器人可以提高无线传感器网络的能力和家庭监控系统.国内,孔维康等人[6]提出了基于ZigBee无线通信技术的养老院健康监护方案;实现了实时监测老人的心率、脉搏、血压.潘永友[7]研究的是基于物联网技术的养老院管理系统设计与实现,设计了针对老人的院区内外定位、摔倒检测、紧急呼叫、生命体征检测等看护管理功能.文献[8]设计家庭的监护机器人,它融合了移动机器人定位的技术、语音识别技术、通信技术,为行动不便者提供简单且极其重要的监护服务.
尽管国内外已有关于室内医疗保健系统及相关设备研究方面,但倾向于监测生命体征参数,存在着信息化程度低、远程监控缺失等不足.为解决上述不足,采用当前先进计算机与通信技术提出了基于云技术与物联网室内智能医疗看护系统与药品投递机器人;设计了远程移动端和PC端管理系统;最后对系统与设备的相关性能进行测试,验证系统的合理性与可行性.
1 物联网与云技术的室内医疗保健系统框架
基于物联网与云技术可以实现室内医疗保健系统的智能化与信息化.如图1(a)构建分层医疗保健系统,包括感知层技术、网络层技术、应用层技术和公共技术.其中物理层感知系统分为数据采集与信息处理;网络层实现信息的交互与数据通信;信息开放平台、云技术平台、其他服务平台构成了物联网应用子系统,环境监测、监护系统等组成应用层顶端服务.
基于物联网药品投递智能机器人系统的功能主要由:网络节点控制、线上系统位置显示、基于RFID的药品配送、室内环境参数采集、云端存储、用户端六部分构成,其总体设计图如图1(b).网络节点控制:能够通过线上手机端或网页端控制线下系统对每个房间的配品投送种类和数量,以及监控情况.线上系统位置显示:系统开始工作时,会在APP端和PC的网页端显示系统所处的位置.药品配送机器人系统:通过读取每个房间的节点信息,决定每个房间的药物需求情况.室内环境参数采集:利用网页端和APP端实时显示养老院的环境情况.云端存储:云端作为系统的媒介,用于储存养老院的环境数据,监控数据.用户端:系统采集的数据更加直观得反馈给用户,也让用户能可视化得控制系统.

图1 物联网的技术体系与功能构架图
2 系统硬件设计
2.1 系统总硬件设计
该系统包括室内感知节点、药品投递机器人、网络感知节点等组成.如表1所示,本系统硬件部分由主控多核嵌入式、协助主控STM32F103RC处理器、MFRC522模块、各种传感器、摄像头等几部分构成.通过数字接口、SPI、AO、CSI、串口等连接,构建如图2(a)所示的硬件框图,实现系统所需感知、数据传递、药品投递等功能.

表1 系统硬件模块
2.2 药品投递机器人的硬件设计
如图2(b)所示,本系统采用基于ARM Cortex-M3内核的STM32F103RC高性能单片机,其突出优点是高性能、低成本、低功耗,内置96 K的SRAM,时钟频率72 MHz时,从闪存执行代码,功耗低至36 mA,实际相当于0.5 mA/MHz.还采用了性能为1.2 GHz四核Broadcom CEM2837 64 位ARMV8处理器的树莓派3代,板载BCM43143WIFI模块等,利用这一高性能的多核嵌入式系统保障了配药能够稳定的实现.另外,系统采用RC522模块来进行读写卡操作,RC522是应用于13.56 MHz非接触式通信中高集成度读写卡系列芯片中的一员.是NXP公司针对“三表”应用推出的一款低 电压、低成本、体积小的非接触式读写卡芯片,具有集成度的调制解调电路、支持ISO/IEC 14443 Type A和MIFARE®通信协议、10 Mbit/s的SPI接口、灵活的中断模式等优良性能,有利于系统快速、稳定地获取卡里的信息.药品配送系统上电后STM32F103RC配置SPI串口驱动RC522模块,通过RC522开启天线发出13.56 MHZ高频微波,当微波接CSI排线控制摄像头进行监控.STM32F103RC处理器上电后,通过USART输入指令配置WIFI模块并让其连上有网络的热点环境,通过SPI串口输入指令配置RC522模块.然后WIFI模块通过EDP协议访问云服务器上面的数据,并返回获取的信息.如果检测到返回的数据没有控制命令,则不开启RC522模块的天线也不进行RFID的读写操作;如果检测到返回的数据有控制命令,则开启RC522模块的天线和写卡指示灯,并且把新的数据通过ISO14443A写进节点中.

图2 系统硬件设计框图
3 基于物联网药品投递机器人软件系统设计
3.1 数据处理与机器人运动感知程序系统设计
如图3(a)所示,系统开始启动时,多核嵌入式充当客户端和STM32F103RC充当服务器并连上对应WiFi热点.然后,多核嵌入式开设多线程通过WiFi模块用于监听来自STM32F103RC上的动作控制数据(如:RC522读写情况,传感器数据等).在接收到WiFi模块的数据后,第一时间判断数据类型,如RC522读取的节点数据,再进行判断决定是否开设摄像头,是否配送药物.如有室内环境传感器的数据就立即上传云端进行储存,否则没有收到数据就返回等待接收数据的状态.
系统启动时,STM32F103RC控制电机的寻迹功能随即启动.驱动传感器不间断得采集室内环境数据,并且每4 s发送一次数据给多核嵌入式数据处理中心.动作控制的STM32F103RC先判断是否有可读取数据的节点.若有,即把数据存进字符串变量中,通过WiFi模块传送至数据处理中心,然后回到寻迹运动中.若无,则返回寻迹运动中.具体程序逻辑如图3(b)所示.
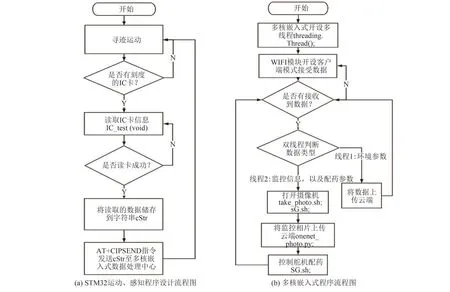
图3 多核嵌入式程序流程图与STM32运动、感知程序设计流程图

输入:position_set输出:Finish_flag1.Initializtion 2.For i= 1:|position_set|3.If robot arrived the ithposition 4.Satus_set[i] = Read (position_set[i]);5.getting M_num[i],M_type[i];6.End if 7.If Satus_set[i] >= Thres_value8.Robot stops and waits for reading message.9.Drive the camera and reading the values from different sensors.10.According the M_num[i],M_type[i] delivering the medicine.11.Finish_flag=1 12.Else 13.Finish_flag= 1;Break;

14.End if 15.End for 16.Return Finish_flag
3.2 基于阈值的药物投递算法的设计
面向所设计系统的特点,提出基于阈值的药物投递算法,具体算法设计如算法1所示.该算法分为3个部分,首先初始化获取药品投递位置信息position_set.当机器人移动到第i个位置是,读取IC卡中状态信息Satus_set[i];并获得药品种类和数量相关性M_num[i],M_type[i].然后对装置值进行阈值Thres_value判断,如果大于等于阈值,移动机器人当前位置停止、完成信息的读取、图像采集和药品的投递,并将功能状态赋值(Finish_flag) 1;否则结束本次投递,并将功能状态赋值0.最后,算法返回功能状态值Finish_flag.
4 试验与实现
4.1 试验测试与分析
在实验室构建了试验环境对数据上传云服务时间、药物配送功能、节点写卡等进行了测试.系统时刻上传室内环境数据并储存在云端,其中根据储存数据内容和上传时间,对该功能进行测试分析.云存储的环境参数内容有5项,其中最快上传时间为2.1 s,最慢上传时间7.5 s,平均上传时间5.21 s,每项内容上传的时间误差不超过1 s,并且没有出现数据丢包.说明我们系统的数据传输以及云存储性能比较稳定.
系统根据节点信息,进行不同的配药动作.其中根据不同的配药情况,测量舵机动作时的电流变化情况,并且记录配送动作的时间.在配药动作中,舵机最大电流可达到1.923 A,最小电流为:0.131 A,平均运行电流为0.77 A.配送药物的时间根据配送药物的数量决定,配送数量越多所花的时间就越多,平均每配送一颗药物所花的时间为4.19 s.
每个特定点都配有一个网络节点,用来获取线上下达的信息,并将信息写入原先的M1卡中,让系统做出相应的动作.同样,在测试中随机地抽取了5次实验,并记录了网络节点成功写卡的时间.网络节点成功写卡的最长时间是50 s,平均写卡时间为48.3 s.
4.2 面向用户上位机端设计
本系统上位机结合不同用户需求,特设计两种人性化的终端:PC端和手机端.PC端采用网站设计形式;手机端基于Android系统构建相关APP监控系统.两种终端可以满足不同人群的需要,用户可以根据自己的特性选择不同的终端,其具体界面如图4所示.

图4 用户上位机端
5 小结
我国已经进入老龄化时代,居家养老成为现实,然而当前的医疗系统不适应当前需求.基于对当前医疗保健系统的国内外调查,针对不足与现状提出了一种基于云技术与物联网药品投递智能系统框架;采用多核嵌入式系统、RFID、IEEE 802.11通信协议、开放云云平台等构建了新型室内医疗系统与药品投送机器人系统;设计了远程移动端和PC端管理系统;构建相关试验环境,对系统与设备的相关性能进行测试,验证系统的合理性与可行性.未来需要进一步优化系统,构建大规模试验与应用.
1 Torkestani SS,Julien-Vergonjanne A,Cances JP.Indoor optical wireless system dedicated to healthcare application in hospital.Proceedings of the 2010 7th International Symposium on Communication Systems Networks and Digital Signal Processing.Newcastle Upon Tyne,UK.2010.542-546.
2 王志宝,孙铁山,李国平.近20年来中国人口老龄化的区域差异及其演化.人口研究,2013,37(1):66-77.
3 韦樟清.养老院老人医疗保障状况调查分析——以福建省为例.社会保障研究,2011,(2):69-77.
4 Mercuri M,Garripoli C,Karsmakers P,et al.Healthcare system for non-invasive fall detection in indoor environment.In:De Gloria A,ed.Applications in Electronics Pervading Industry,Environment and Society.Cham:Springer,2016.145-152.
5 Yu C,Chen X.Home monitoring system based on indoor service robot and wireless sensor network.Computers &Electrical Engineering,2013,39(4):1276-1287.
6 孔维康,陶帅,汪祖民.基于ZigBee的养老院健康监护系统设计.计算机测量与控制,2016,24(1):95-98.
7 潘永友.基于物联网技术的养老院管理系统设计与实现[硕士学位论文].杭州:杭州电子科技大学,2013.
8 郭志强.家庭监护机器人关键技术的研究与实现[硕士学位论文].广州:华南理工大学,2011.
