两级式光伏并网逆变器的非线性控制系统设计
2018-06-12于国庆段高磊
于国庆 段高磊

摘 要: 传统两级式光伏并网逆变器控制策略存在系统无效损耗过大、系统控制效率低下等问题。为了有效解决此问题,设计新型两级式光伏并网逆变器的非线性控制系统。通过系统结构设计、光伏并网逆变器非线性控制进网电流环设计、非线性控制系统直流母线电压环设计,完成系统硬件设计。通过两级式光伏非线性控制侧功率解耦电容设计、系统母线电容设计、系统Boost电感设计,完成系统软件设计。模拟新型系统运行环境,设计对比实验结果表明,与传统两级式光伏并网逆变器控制策略相比,新型系统能有效控制无效损耗,大幅提升系统控制效率。
关键词: 两级式光伏; 并网逆变器; 控制系统; 进网电流环; 母线电压环; 解耦电容; Boost电感
中图分类号: TN964?34; TM464 文献标识码: A 文章编号: 1004?373X(2018)12?0108?03
Abstract: As there exist problems such as excessive invalid loss and low control efficiency of the system in the control strategy of the traditional two?stage photovoltaic grid?connected inverter, a nonlinear control system is designed for the new two?stage photovoltaic grid?connected inverter. The hardware design of the system is accomplished by means of the design of the system structure, network current loop for nonlinear control of the photovoltaic grid?connected inverter, and DC bus voltage loop of the nonlinear control system. The software design of the system is accomplished by means of the design of the power decoupling capacitance on the two?stage photovoltaic nonlinear control side, bus capacitance of the system, and Boost inductance of the system. The contrast experiment was carried out by simulating the operating environment of the new system. The results show that in comparison with the control strategy of the traditional two?stage photovoltaic grid?connected inverter, the new system can effectively control the invalid loss and greatly improve the system control efficiency.
Keywords: two?stage photovoltaic; grid?connected inverter; control system; network current loop; bus voltage loop; decoupling capacitance; Boost inductance
光伏发电系统包括离网型光伏发电、并网型光伏发电两种。其中,离网型光伏发电可细分为有辅助源型、无辅助源型两大类。总的来说,离网型光伏发电系统的结构相对简单,对自然环境的污染也相对较小,此种系统大多被应用于对偏远的岛屿地区进行电力供给。并网型光伏发电系统,必须外接逆变器负载,并通过此装置直接与电网相连,产生集中式供电和分散式供电。其中,集中式光伏供电系统的变现形式,包括光伏建筑、光伏发电站等,分散式供电系统主要表现为光伏屋顶。两级式光伏并网逆变器是光伏发电的能量变换核心单元,对其进行有效的非线性控制,不僅能够大幅缩减系统的搭建成本,也能保证入网电流的质量及效率等属性得到大幅度的提升[1?2]。而传统两级式光伏并网逆变器控制策略利用PWM调制方式,对所有入网电流进行控制,虽然一定程度上,缓解变换器与母线的入网电流压力,且这种方法,极易造成系统无效损耗过大、系统控制效率低下等现象的出现。为了降低此类现象的发生几率,通过对进网电流环、母线电流环、母线电容、Boost电感等结构的改进,完成系统的软硬件模块设计。且通过对比实验的方式,证明新型系统确实比传统方法,具备更高的实用性价值。
1 系统硬件设计
两级式光伏并网逆变器非线性控制系统硬件设计由结构设计、进网电流环设计、母线电压环设计三部分组成,具体搭建过程可按如下步骤进行。
1.1 硬件系统结构设计
两级式光伏并网逆变器非线性控制系统硬件结构包含光伏阵列、充放电控制器、蓄电池、并网逆变器、负载装置等模块 。其中,并网逆变器是负责系统能量变换的核心环节,对系统的运行安全性起到控制作用。光伏阵列可采集到系统非线性控制指令的电信号,并将此信号传输至充放电控制器[3?4]。蓄电池与充放电控制器直接相连,既可以向充放电控制器输送所需的电能,也可以将充放电控制器中多余的电能进行回收存储。并网逆变器作为充放电控制器的下级结构,与电网负载结构直接相连。
1.2 光伏并网逆变器非线性控制进网电流环设计
两级式光伏并网逆变器非线性控制系统,硬件进网电流环采用桥臂式开关,保证非线性控制系统的连通性。在每个开关周期内,两级式光伏并网逆变器始终保持连通状态,使控制进网电流环开关频率恒大于基波频率。光伏并网逆变器非线性控制进网电流环以SPWM原理作为主要搭建依据[5?6]。为了保证电流质量始终维持较高水平,必须令载波信号在相邻两个开关周期内,出现两次峰值,在每次达到峰值时,对进入电流环的进网电流实行非线性控制,已达到系统的控制作用。
1.3 非线性控制系统硬件直流母线电压环设计
两级式光伏并网逆变器非线性控制系统硬件直流母线电压环,前端承接逆变器网侧电流。忽略功率损耗的情况下,在全桥逆变器中,对网侧电流进行逆变增压处理,当网侧电流达到额定数值时,认定此刻的电压为直流母线电压。对直流母线电压进行输入逆变处理,求取有效稳压母线电压[7]。根据电压、电流双环控制原理对母线电压进行环控处理,完成环控处理的直流母线电压,会自动按照环状形态向下传递,此环状结构即为直流母线电压环。
2 系统软件设计
上述过程完成系统硬件模块搭建。为了实现系统的顺利运行,还需按照如下步骤完成系统软件模块设计。
2.1 两级式光伏非线性控制侧功率解耦电容设计
两级式光伏并网逆变器非线性控制系统侧功率解耦电容设计利用光伏电池的输出特性曲线。当输出电压达到最大功率时,记录此时的脉动功率为最大波动功率。当输出电压达到最小值时,记录此时的脉动功率为最小光伏功率[8]。系统侧功率解耦电容始终在最大波动功率与最小光伏功率间变化,根据每次变化情况的不同,完成系统侧功率解耦电容设计。
2.2 非线性控制系统软件母线电容设计
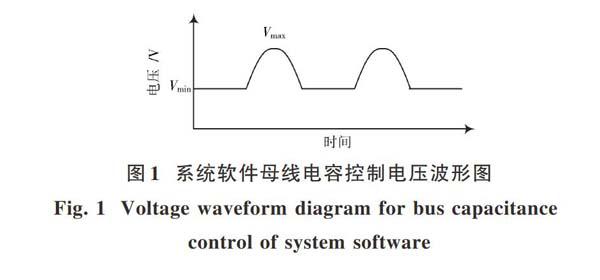
非线性控制系统软件母线电容以额定功率为1 kW的电路元件作为标准电容,电网的频率通常情况下保持在48.5~51.5 Hz之间。当非线性控制系统软件母线电容满足上表的约束条件时,母线电容所产生的非线性控制电容电压波形如图1所示。
2.3 非线性控制系统软件Boost电感设计
非线性控制系统软件Boost电感设计利用电流提供的波头作为开关频率的纹波。系统软件Boost电感决定流过系统电流的高频纹波总量,故系统软件Boost电感值的大小直接影响系统的非线性控制稳定性[9]。若系统Boost电感在相邻两个周期的变化幅度始终保持平稳状态,两级式光伏并网逆变器非线性控制系统也可以保持平稳的非线性控制情况。若系统Boost电感在相邻两个周期的变化幅度不能长时间保持平稳状态时,两级式光伏并网逆变器非线性控制系统。
3 实验结果与分析
上述过程完成两级式光伏并网逆变器非线性控制系统的设计。为了验证该新型系统确实比传统系统具备更强的实用性价值。以两台配置相同的计算机作为实验对象,一台搭载新型系统,作为实验组;另一台搭载传统系统,作为对照组。令两台计算机同时模拟系统的运行环境,在保持一段时间的工作状态后,分别记录两组系统的无效损耗情况及系统控制效率[10]。
3.1 實验参数设置
实验参数设置如表1所示。表中参数依次代表控制效率、逆变器运行效率、线性控制参数、系统数据总量、并网逆变参数、两级式光伏参数。其中,线性控制参数与10-8成正比。为了保证实验的公平性,实验组与对照组参数始终保持一致。
3.2 系统无效损耗对比
两级式光伏并网逆变器非线性控制系统的无效损耗情况,与PDA指标的变化情况呈正比。当PDA指标增大时,系统的无效损耗也增大,反之则减小。图2、图3分别为实验组、对照组系统的无效损耗情况。对比图2、图3可知,实验组PDA指标随时间的变化,先增加再减小,最大值仅为32.21%。实验组系统的无效损耗情况,也随时间的变化,先增加再减小,最大值仅为36.58%。对照组PDA指标随时间的变化始终保持增加状态,最大值达到40.08%。对照组系统的无效损耗情况,也随时间的变化,始终保持增加状态,最大值达到49.96%,明显高于实验组。所以,可证明应用两级式光伏并网逆变器非线性控制系统确实可以有效控制无效损耗情况。
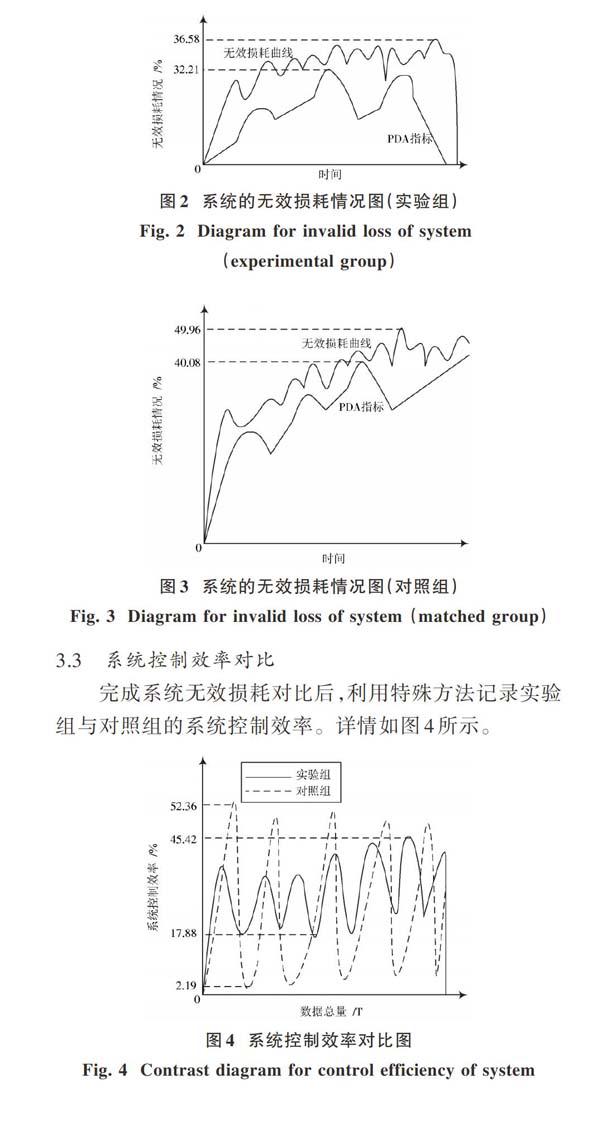
3.3 系统控制效率对比
完成系统无效损耗对比后,利用特殊方法记录实验组与对照组的系统控制效率。详情如图4所示。
分析图4可知,实验组系统控制效率最大值为45.42%,最小值为17.88%,二者间差值为27.54%。对照组系统控制效率最大值为52.36%,最小值为2.19%,二者间差值为50.17%,明显大于实验组。系统控制效率最大值与最小值间差值越大,代表系统控制效率越低,非线性控制性能越差。所以,可证明应用两级式光伏并网逆变器非线性控制系统确实可以大幅提升系统控制效率。
4 结 语
两级式光伏并网逆变器非线性控制系统的出现,有效改善了原有方法的弊端,提升了无效损耗情况的控制性,并增强非线性控制性能。
参考文献
[1] 张建华,李杨,吴学礼,等.基于U模型的非线性系统Super?Twisting滑模控制研究[J].河北科技大学学报,2016,37(4):376?381.
ZHANG Jianhua, LI Yang, WU Xueli, et al. Study of Super?Twisting sliding mode control for U model based nonlinear system [J]. Journal of Hebei University of Science and Technology, 2016, 37(4): 376?381.
[2] 程启明,黄伟,程尹曼,等.双级矩阵变换器驱动永磁同步电机的混合非线性控制系统[J].电工技术学报,2017,32(4):101?111.
CHENG Qiming, HUANG Wei, CHENG Yinman, et al. Hybrid nonlinear control system of permanent magnet synchronous motor driven by two stage matrix converter [J]. Transactions of China Electrotechnical Society, 2017, 32(4): 101?111.
[3] 徐凤霞,张雪杰,宋晓辉,等.基于U模型的神经网络PID控制系统设计[J].齐齐哈尔大学学报(自然科学版),2017,33(6):24?26.
XU Fengxia, ZHANG Xuejie, SONG Xiaohui, et al. Design of radial basis function neural network PID control system based on nonlinear U?model [J]. Journal of Qiqihar University (Natural science edition), 2017, 33(6): 24?26.
[4] 李啸骢,郑涛,梁志坚,等.水轮机水门、励磁与电气制动系统非线性综合控制[J].电力自动化设备,2016,36(7):97?103.
LI Xiaocong, ZHENG Tao, LIANG Zhijian, et al. Integrated nonlinear control of hydroturbine governor and excitation & TCBR system [J]. Electric power automation equipment, 2016, 36(7): 97?103.
[5] 王首斌,马思强,陈文峰,等.基于执行器误差补偿的不确定非线性MIMO系统控制[J].计算机测量与控制,2016,24(3):92?94.
WANG Shoubin, MA Siqiang, CHEN Wenfeng, et al. Nonlinear uncertain MIMO system control based on actuator error compensation [J]. Computer measurement & control, 2016, 24(3): 92?94.
[6] 鲍伟,李成,孔慧芳.双离合器车辆蠕动和起步非线性无静差跟踪控制与仿真[J].中国公路学报,2016,29(3):142?150.
BAO Wei, LI Cheng, KONG Huifang. Non?linear zero steady?state error trace control and simulation of dual?clutch transmission vehicle in creep and launch processes [J]. China journal of highway and transport, 2016, 29(3): 142?150.
[7] 高正中,肖佳宜,申梦茜,等.抑制电力系统低频振荡的UPFC控制器设计[J].山东科技大学学报(自然科学版),2017,36(5):91?96.
GAO Zhengzhong, XIAO Jiayi, SHEN Mengqian, et al. UPFC controller design for low frequency oscillation of power system [J]. Journal of Shandong University of Science and Technology (Natural science), 2017, 36(5): 91?96.
[8] 余卓平,章仁夑,熊璐,等.考虑线控转向非线性和不确定性的转向角控制[J].同济大学学报(自然科学版),2017,45(1):79?86.
YU Zhuoping, ZHANG Renxie, XIONG Lu, et al. Steering angle control of steer?by?wire systems considering nonlinear characteristic and uncertainty parameters [J]. Journal of Tongji University (Natural science), 2017, 45(1): 79?86.
[9] 麻士东,杨国庆.直升机姿态与航迹非线性动态逆飞行控制模型[J].华中科技大学学报(自然科学版),2016,44(12):92?97.
MA Shidong, YANG Guoqing. Mathematical modeling of helicopter attitude and trajectory flight control based on nonlinear dynamic inversion [J]. Journal of Huazhong University of Science and Technology (Nature science edition), 2016, 44(12): 92?97.
[10] 李果,赵建中.小型无人直升机的广义Hamilton非线性鲁棒控制[J].北京信息科技大学学报(自然科学版),2016,31(4):1?7.
LI Guo, ZHAO Jianzhong. Generalized Hamilton nonlinear robust control for miniature unmanned helicopters [J]. Journal of Beijing Information Science & Technology University, 2016, 31(4): 1?7.
