基于桁架的多网络远程控制相机精准移动方法
2018-06-12刘昱显来智勇石复习田建州
刘昱显 来智勇 石复习 田建州
摘 要: 提出一种多网络远程控制方法,以平行四杆结构桁架为载台,基于STM32F407芯片设计步进电机驱动电路和反馈信号采集电路。通过4G网络、W5200网络模块、OneNET平台组网实现专家端口和数据中心交互控制网络相机精准定位的功能。根据实时性和精准性设计网络控制方案,并提出相机定位公式。为使水平移动误差控制在5%内,综合考虑灵敏度、稳定性、移动误差,设定电机速度为2.0 cm/s。调整参数改善网络通信并统计流量消耗,最终设定系统异常重启时长为30 s,W5200网络通信定时参数为5 s,W5200网络异常重启时长为10 s,每小时消耗流量3~4 MB。
关键词: 多网络; 平行四杆桁架; 步进电机; 交互控制; W5200网络; 相机定位
中图分类号: TN711?34; TP273.5 文献标识码: A 文章编号: 1004?373X(2018)12?0006?04
Abstract: A multi?network remote control method is proposed. With the parallel four?bar structure truss as the platform, the stepper motor drive circuit and feedback signal acquisition circuit are designed based on the STM32F407 chip. The accurate positioning function of the network camera interactively controlled by the expert port and data center is realized by means of the networking of 4G network, W5200 network module, and OneNET platform. Network control scheme is designed according to the real?time and precision performances, and the camera positioning formula is put forward. To control the horizontal movement error within 5%, the motor speed is set to 2.0 cm/s, comprehensively considering the sensitivity, stability and movement error. Network communications is improved by adjusting parameters, and traffic consumption statistics is obtained. The abnormal restart time duration of the system is set to 30 s, the timing parameter of W5200 network communications is set to 5 s, and the abnormal restart time duration of W5200 network is set to 10 s, with 3~4 MB traffic consumed per hour.
Keywords: multi?network; parallel four?bar truss; stepper motor; interactive control; W5200 network; camera positioning
0 引 言
基于T型桁架应用网络通信和步进电机控制技术设计的作物监测系统实现了远程多点监测[1],但存在以下问题:第一、仅使用有线网络在农田部署的成本和维护代价较高,且难以实现跨网交互实时控制;第二、T型桁架垂直导杆搭载步进电机震动严重影响网络相机运动稳定性,且运动方式不灵活;第三、不能精准定位和实时反馈网络相机位置。龚金成等对步进电机的网络控制策略、通信方式和安全控制等方面进行了研究,采用在远程客户端实时操控电机的方法[2]。4G网络无需布线、传输速度高、实时性好 [3],谢相博等基于4G设计的无人机巡航系统实现了远程飞行控制和准确反馈飞行信息[4]。无线网络对TCP拥塞控制具有挑战性,国内外多是从拥塞控制算法方面改进以提高TCP通信性能[5],为应对互联网拥塞控制异质性,Wang Z等提出了一种INVS的新型TCP协议[6]。由于网络通信中存在多种网络结构,基于TCP协议跨平台通信会导致很多问题,而基于物联网平台可解决该问题,石栋等设计的老人活动监测系统可通过手机APP或物联网云平台查看 [7];袁颖等为研究环境参数对光伏电站的影响利用Yeelink平台实现上位机监测[8]。本文通过专家端口和数据中心利用OneNET平台、W5200硬件TCP/IP协议栈、4G网络组网实现多网络交互控制步进电机精准定位,设计平行四杆结构桁架并研究步进电机的网络控制策略。
1 系统设计
1.1 平行四杆结构桁架设计
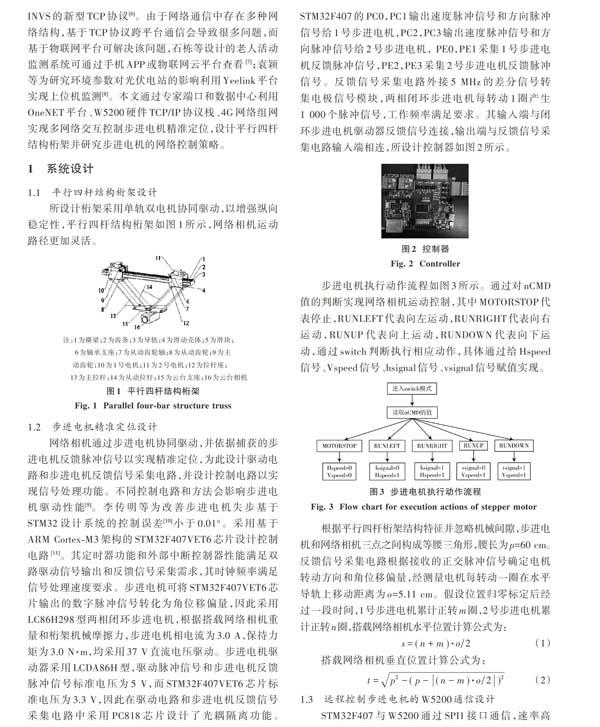
所设计桁架采用单轨双电机协同驱动,以增强纵向稳定性,平行四杆结构桁架如图1所示,网络相机运动路径更加灵活。
1.2 步进电机精准定位设计
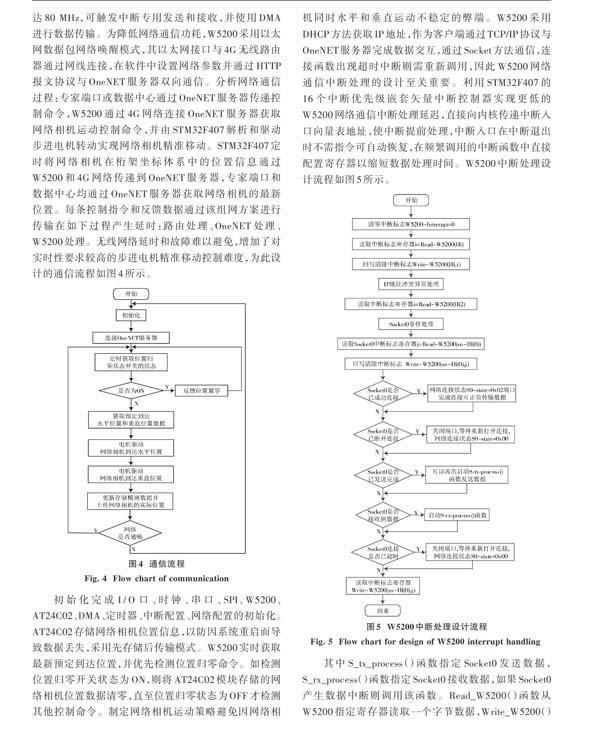
网络相机通过步进电机协同驱动,并依据捕获的步进电机反馈脉冲信号以实现精准定位,为此设计驱动电路和步进电机反馈信号采集电路,并设计控制电路以实现信号处理功能。不同控制电路和方法会影响步进电机驱动性能[9]。李传明等为改善步进电机失步基于STM32设计系统的控制误差[10]小于0.01°。采用基于ARM Cortex?M3架构的STM32F407VET6芯片设计控制电路 [11]。其定时器功能和外部中断控制器性能满足双路驱动信号输出和反馈信号采集需求,其时钟频率满足信号处理速度要求。步进电机可将STM32F407VET6芯片输出的数字脉冲信号转化为角位移偏量,因此采用LC86H298型两相闭环步进电机,根据搭载网络相机重量和桁架机械摩擦力,步进电机相电流为3.0 A,保持力矩为3.0 N·m,均采用37 V直流电压驱动。步进电机驱动器采用LCDA86H型,驱动脉冲信号和步进电机反馈脉冲信号标准电压为5 V,而STM32F407VET6芯片标准电压为3.3 V,因此在驱动电路和步进电机反馈信号采集电路中采用PC818芯片设计了光耦隔离功能。STM32F407的PC0,PC1输出速度脉冲信号和方向脉冲信号给1号步进电机,PC2,PC3输出速度脉冲信号和方向脉冲信号给2号步进电机, PE0,PE1采集1号步进电机反馈脉冲信号,PE2,PE3采集2号步进电机反馈脉冲信号。反馈信号采集电路外接5 MHz的差分信号转集电极信号模块,两相闭环步进电机每转动1圈产生1 000个脉冲信号,工作频率满足要求。其输入端与闭环步进电机驱动器反馈信号连接,输出端与反馈信号采集电路输入端相连,所设计控制器如图2所示。
1.3 远程控制步进电机的W5200通信设计
STM32F407与W5200通过SPI1接口通信,速率高达80 MHz,可触发中断专用发送和接收,并使用DMA进行数据传输。为降低网络通信功耗,W5200采用以太网数据包网络唤醒模式,其以太网接口与4G无线路由器通过网线连接,在软件中设置网络参数并通过HTTP报文协议与OneNET服务器双向通信。分析网络通信过程:专家端口或数据中心通过OneNET服务器传递控制命令,W5200通过4G网络连接OneNET服务器获取网络相机运动控制命令,并由STM32F407解析和驱动步进电机转动实现网络相机精准移动。STM32F407定时将网络相机在桁架坐标体系中的位置信息通过W5200和4G网络传递到OneNET服务器,专家端口和数据中心均通过OneNET服务器获取网络相机的最新位置。每条控制指令和反馈数据通过该组网方案进行传输在如下过程产生延时:路由处理、OneNET处理、W5200处理。无线网络延时和故障难以避免,增加了对实时性要求较高的步进电机精准移动控制难度,为此设计的通信流程如图4所示。
初始化完成I/O口、时钟、串口、SPI、W5200、AT24C02、DMA、定时器、中断配置、网络配置的初始化。AT24C02存储网络相机位置信息,以防因系统重启而导致数据丢失,采用先存储后传输模式。W5200实时获取最新预定到达位置,并优先检测位置归零命令。如检测位置归零开关状态为ON,则将AT24C02模塊存储的网络相机位置数据清零,直至位置归零状态为OFF才检测其他控制命令。制定网络相机运动策略避免因网络相机同时水平和垂直运动不稳定的弊端。W5200采用DHCP方法获取IP地址,作为客户端通过TCP/IP协议与OneNET服务器完成数据交互,通过Socket方法通信,连接函数出现超时中断则需重新调用,因此W5200网络通信中断处理的设计至关重要。利用STM32F407的16个中断优先级嵌套矢量中断控制器实现更低的W5200网络通信中断处理延迟,直接向内核传递中断入口向量表地址,使中断提前处理,中断入口在中断退出时不需指令可自动恢复,在频繁调用的中断函数中直接配置寄存器以缩短数据处理时间。W5200中断处理设计流程如图5所示。
其中S_tx_process()函数指定Socket0发送数据, S_rx_process()函数指定Socket0接收数据,如果Socket0产生数据中断则调用该函数。Read_W5200()函数从W5200指定寄存器读取一个字节数据,Write_W5200()函数向W5200指定寄存器写数据,其底层实现使用了SPI1通信方式。
2 系统测试和分析
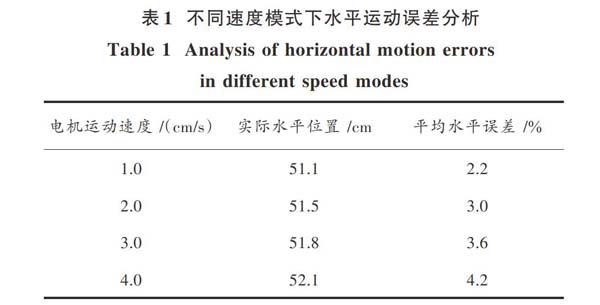
经测试步进电机协同驱动过程中无明显启动和停止时间差,电机转速越慢网络相机晃动幅度越小。实施了网络相机移动误差测试,设定水平预定位置为50.0 cm,测试不同速度模式下水平移动误差,经过80次测试平均误差如表1所示。
为了使水平移动误差控制在5%内,综合考虑控制灵敏度、网络相机运动稳定性、移动误差要求,最终设定电机速度为2.0 cm/s。该速度模式满足远程控制网络相机通过桁架进行多点监控的要求。通过调整参数改善网络通信性能并统计流量消耗情况。4G无线路由器采用华为B315S?936型,网络协议是IEEE 802.11b/g/n。经过实验,最终确定系统异常定时重启时长为30 s,W5200获取OneNET服务器最新数据定时参数为5 s,W5200网络异常重启时长为10 s,网络相机位置反馈时间间隔为5 s。在该情况下,4G无线路由器每小时消耗流量3~4 MB。
3 结 语
本文研究了一种基于平行四杆桁架的多网络远程控制网络相机精准移动的方法,采用OneNET平台、W5200硬件TCP/IP协议栈、4G网络组网实现了专家端口和数据中心交互控制网络相机定位的功能。通过速度、网络参数调试,使灵敏度、稳定性、移动误差均满足网络相机多点监控的要求。该方法还需对路径规划算法和速度智能调节算法进行深入研究。
注:本文通讯作者为来智勇。
参考文献
[1] 韩文霆,崔利华,陈微,等.桁架式可移动作物生长远程监控系统设计[J].农业工程学报,2014,30(13):160?168.
HAN Wenting, CUI Lihua, CHEN Wei, et al. Design of movable remote crop monitoring system on fixed truss [J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(13): 160?168.
[2] 龚金成,谌建飞,赵丹,等.步进电机远程控制方案的设计及实现[J].机电工程,2016,33(11):1398?1402.
GONG Jincheng, CHEN Jianfei, ZHAO Dan, et al. Design and implementation of remote control for stepper motor [J]. Journal of mechanical & electrical engineering, 2016, 33(11): 1398?1402.
[3] 王德麾,冯军帅,宋海亮,等.基于无线传感器网络和3G/4G的远程环境监测系统研究[J].物联网技术,2015,5(3):17?18.
WANG Dehui, FENG Junshuai, SONG Hailiang, et al. Research of remote environmental monitoring system based on wireless sensor network and 3G/4G [J]. Internet of Things technologies, 2015, 5(3): 17?18.
[4] 谢相博,徐光辉,范凯鑫,等.基于4G的无人机远程巡逻系统[J].通信技术,2015,48(11):1305?1309.
XIE Xiangbo, XU Guanghui, FAN Kaixin, et al. UAV remote patrol system based on 4G [J]. Communications technology, 2015, 48(11): 1305?1309.
[5] WANG J, WEN J, ZHANG J, et al. TCP?FIT: an improved TCP algorithm for heterogeneous networks [J]. Journal of network & computer applications, 2016, 71: 167?180.
[6] WANG Z, ZENG X, LIU X, et al. TCP congestion control algorithm for heterogeneous Internet [J]. Journal of network & computer applications, 2016, 68: 56?64.
[7] 石栋,张克华,徐彪.独居老人云智能跌倒实时检测系统的开发[J].计算机工程与应用,2016,52(19):259?264.
SHI Dong, ZHANG Kehua, XU Biao. Development of cloud intelligent real?time fall detection system for the aged population [J]. Computer engineering and applications, 2016, 52(19): 259?264.
[8] 袁颖,孙荣霞,李瑞,等.基于ZigBee的光伏电站环境实时监测系统[J].微型机与应用,2017,36(3):33?35.
YUAN Ying, SUN Rongxia, LI Rui, et al. Real?time monitoring system for photovoltaic power station environment based on ZigBee [J]. Microcomputer & its applications, 2017, 36(3): 33?35.
[9] 廖平,韩伟伟.基于STM32多步进电机驱动控制系统设计[J].仪表技术与传感器,2016(4):71?73.
LIAO Ping, HAN Weiwei. Design of Drive control system of multiple stepper motors based on STM32 [J]. Instrument technique and sensor, 2016(4): 71?73.
[10] 李传明,崔更申,尹鹏,等.基于STM32F4的电机控制系统设计[J].计算机测量与控制,2015,23(10):3370?3372.
LI Chuanming, CUI Gengshen, YIN Peng, et al. Design of motor control system based on STM32F4 [J]. Computer measurement & control, 2015, 23(10): 3370?3372.
[11] 赵科,李常贤,张彤.基于STM32的无线温湿度控制器[J].化工自动化及仪表,2015,42(6):629?633.
ZHAO Ke, LI Changxian, ZHANG Tong. Design of wireless temperature and humidity controller based on STM32 [J]. Control and instruments in chemical industry, 2015, 42(6): 629?633.
