基于PI控制器的两轮平衡小车设计
2018-06-12王宇坤陈沃源
王宇坤,陈沃源
(江门职业技术学院 广东 江门 529090)
1 绪论
平衡车利用地心引力使其保持自身平衡,同时将自身所受重力作为运动动能的提供者。平衡车的种种优点使其可以作为一种环保、安全、舒适、快速交通工具。平衡车由于自身构造在运动过程中不能自我实现平衡,需要控制两个车载电机的来维持姿态的稳定,通过传感器实时检测车体姿态、通过控制算法产生调整信号,从而控制电动车平衡,对传感器数据的处理和控制算法的设计是制作平衡车的难点,同时平衡车是一种非线性系统,建模和控制难度大,具有较强的理论研究价值。
2 系统方案分析与选择论证
选择STM32F103ZET6作为平衡车主控芯片,使用陀螺仪传感器和加速度传感器读取相关的数据,从而实时获取平衡车的相关姿态数据,由于两种传感自身的偏差,本文通过互补滤波的方式最大限度的消除传感器误差,融合后的数据通过闭环PI控制器后输出驱动信号,驱动信号经驱动模块放大后控制电机,同时为了便于升级调试本文扩展了JLINK接口,使用的是SWD模式,用于仿真调试。系统方框图如图1所示。
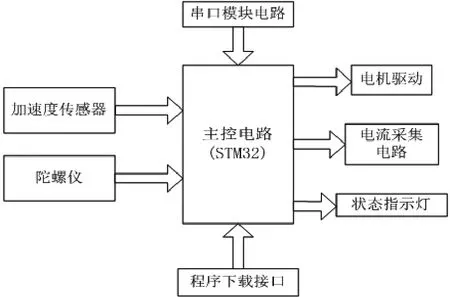
图1 系统方框图
3 系统软件设计
3.1 滤波器
如果只使用加速度计或者陀螺仪其中一个,都无法提供一组准确的平衡车姿态信息,从而无法实现小车平衡。本文采用加速度计和者陀螺仪共同提供车体姿态信息,两个输出数据采用互补滤波方法来融合,单一传感器输出数据均不准确,但互补滤波后的数据很好的弥补陀螺仪和加速度计各自的偏差,从而可以得到一个较好的倾角近似值。该滤波器的实现算法如图2所示。
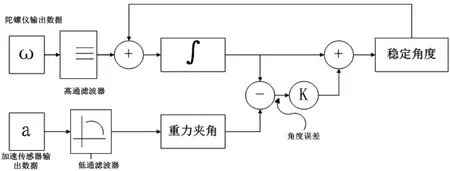
图2 互补滤波器算法流程图
3.2 PID控制器设计
本采用角度环加速度速度环的双闭环PI控制的方法来实现小车的平衡控制。信号流图如图3所示。

图3 PID控制流图
本设计采用双闭环PI控制,内环为速度环,经内环运算后得到电机驱动信号,控制车轮转速与角度环输出转速给定值保持一致;外环为车体姿态角控制环,用于控制小车倾斜角度,如果倾斜角多大小车失去平衡影响使用,而外环PI输出即为内环给定。
4 结语
本设计的研究对象为两轮平衡小车,主要内容为两轮平衡小车硬件和软件系统设计,经过热测试和模拟故障测试,验证硬件电路可靠性、实用性,满足系统设计要求。软件主要采用加速度计和陀螺仪作为检查设备,并将采样数进行融合得到小车倾角信息,倾角信息通过设计双闭环PI控制器后能够控制车体平衡,通过载人实验验证了算法可靠性和准确性,可以实现加减速运行、转向运行、急速刹车等功能,基本达到正常使用要求。
[1] 杨德刚,姜磊,贾文杰.数字PID与其算法改进的研析[J].中国科技信息,2010,10(14):12-15.
[2] 王效杰.基于变结构控制的两轮自平衡小车系统设计与实现[D].西安电子科技大学,2006,10(13):23-26.
[3] 李秀英,刘彦博.基于P W M的四旋翼飞行器控制方法[J].吉林大学学报(信息科学版),2011,29(5):464-472.
