集成触发器控制的三相整流电路闭环系统设计
2018-06-08齐以年李亚东贺博
齐以年,李亚东,贺博
(1.南京国电南自电网自动化有限公司,南京 211100; 2.国网兰州供电公司,兰州 730050;3.西安交通大学 电气工程学院,西安 710049)
0 引言
整流电路是电力电子技术中出现最早、原理相对简单的一种电路结构,其作用是将交流电能变换为直流电能供给直流用电设备。三相桥式全控整流电路输出直流电压的脉动小、易滤波且三相负载平衡,适用于整流负载容量较大或要求快速控制的场合,是目前应用最为广泛的整流电路[1-2]。为简化对三相整流电路的控制,同时提高电路的稳定性,市场上出现了集成的三相触发器模块。本文涉及的集成移相触发器内部集三相电相位检测电路、移相电路、控制电路和触发电路于一体,在配套的三相同步变压器模块支持下,不需外接隔离驱动或电源模块[3],用0~5 V DC信号自动控制或电位器手动控制,可输出3路或6路导通角可改变的可控硅强触发脉冲,触发可控硅,实现移相调压。本文主要研究了集成移相触发器SX-JKZE控制的三相桥式全控整流电路的闭环系统设计,为集成移相触发器能够更好地应用于整流电路提供参考。
1 系统设计
1.1 整流环节传递函数
在对三相桥式全控整流电路进行闭环控制时,将整流桥与集成移相触发看作一个环节。在应用线性控制理论对系统进行控制时,首先要求出此环节的传递函数。由于桥式整流与其移相触发是非线性的,为了简化其控制系统的设计,往往在一定的工作范围内对其进行线性近似,这样也可以得到很好的控制效果。对于感性比较小的负载或纯电阻性负载,移相触发器的输入电压Vc与整流桥的输出平均电压Ud的关系为可以概括为以下分段函数形式
(1)
式中:Ud为整流桥输出电压的平均值,V;U2为三相交流电源输入电压的有效值,V。
Ud=f(Vc)的关系曲线如图1所示,由图1可以看出,Vc与Ud呈明显的非线性关系。整流桥与移相触发环节的增益Ks可由此曲线的斜率得到
(2)
为了得到Vc与Ud的近似线性关系,用最小二乘法对曲线Ud=f(Vc)进行线性拟合,可以得到整流桥与移相触发环节的增益Ks=191。

图1 移相触发器输入电压与整流桥输出电压的关系
由晶闸管的特性可知,一旦移相触发器发出脉冲使晶闸管导通,直至晶闸管关断之前,晶闸管就一直处于导通状态,在此期间,移相触发器输入的电压信号不再对晶闸管产生任何作用,直至晶闸管关断后下一次发出脉冲控制其导通,才能影响整流桥的输出电压,因此,整流桥的输出电压始终滞后于输入移相触发器的控制电压,如图2所示(图中:α为移相触发器触发角)。于是,可以将整流桥与其移相触发器看成一个滞后环节,其滞后效应是由晶闸管的失控时间toc所引起的[4]。
图2 整流输出电压与移相触发器控制电压波形关系
显然,toc与Vc有着非常密切的关系,toc随着Vc的变化而改变,最大失控时间tocmax为2个相邻的自然换相点之间的时间,即与输入的交流电源的频率和整流电路的拓扑结构有关,最大失控时间tocmax由下式确定
tocmax=1/(mf) ,
(3)
式中:f为交流电源的频率,Hz;m为一个周期整流桥输出的直流电压的脉波数。
失控时间一般可取toc=tocmax。用单位阶跃函数ε(t-toc)表示整流桥对移相触发器输入的滞后,则整流桥输出Ud(t)与移相触发器输入Vc之间的关系为
Ud(t)=KsVcε(t-toc) 。
(4)
对式(4)进行拉普拉斯变换,则整流桥与移相触发器环节的传递函数为
(5)
对式(5)进一步简化,将其用泰勒级数展开,可以得到
(6)
考虑到式(6)中toc比较小,可以忽略toc的高次项,则整流桥与移相触发器环节的传递函数W(s)可以近似成一阶惯性环节,其表达式为
(7)
式中:Ks为191;toc取最大失控时间3.3 ms。
图3为三相桥式全控整流电路输出与其移相触发输入的关系框图。

图3 整流电路输出与移相触发输入的关系
1.2 系统闭环参数设计
采用比例积分(PI)控制器的整流系统结构如图4所示。整流桥输出的电压经电感、电容滤波后由测量电路进行信号调理,与参考信号Vref1比较做差后输出给PI控制器,误差信号经PI控制器运算后输入移相触发器。PI控制器通过调节输出电压信号的大小改变移相触发器触发角的大小,使调理信号后的反馈信号与参考信号相等,使输出电压稳定。

图4 三相桥式全控整流电路PI控制系统
由前面的叙述可知,三相交流电源、移相触发、三相桥式全控整流以及滤波环节的传递函数可近似为W(s)。记信号调理电路的传递函数为H1(s),记PI控制器的传递函数为Gc1(s),则整个整流环节的控制系统的数学模型如图5所示。
图5 三相桥式全控整流电路控制系统数学模型

未加校正环节,即Gc1(s)=1时,控制系统的开环环路增益t1(s)为
(8)
由式(8)可得,未加PI校正环节的原始系统开环环路增益Bode图如图6所示,系统的穿越频率ωc1=372 rad/s,相位裕度为129°。

校正后系统的Bode图如图6所示,其在低频段有较高的增益,穿越频率为1 810 rad/s,相位裕度为108°,系统是稳定的,但校正后的系统比原系统的穿越频率高,因此响应速度也较快[5-7]。
图6 校正前、后整流控制系统开环环路增益Bode图
1.3 系统软启动电路设计
对整流电路进行PI闭环控制时,启动时整流桥的滤波电容两端输出电压为0,经信号调理并与参考信号比较的反馈信号也为0,误差信号为最大值。由于积分的作用,PI控制器输出的电压信号为最大饱和值,此最大饱和电压信号输至移相触发器,使整流桥的导通角处于最大状态,整流桥将会输出最大的电压,导致整流桥末端的滤波电容短路,严重时可能会损坏电路中的器件。为避免这种情况的发生,希望在开始时滤波电容两端的电压缓慢上升,使其有一个预充电过程,预充电完成后系统再进行闭环控制,使输出电压达到所期望的值。
由图1可以看出,在允许的移相触发器输入电压范围(0~5 V)内,整流桥的输出电压随移相触发器输入电压的增大而增大。因此,在整流电路的启动阶段,给移相触发器输入一个由小缓慢增大的软启动信号,软启动完成后,再由PI控制器输出的信号控制移相触发器的输入。在此过程中,因为软启动信号由小变大,而PI控制器最初输出最大值,整流桥输出高于目标电压值(500 V)后,PI控制器的输出电压信号会减小。所以,在整个控制过程中,只要软启动信号的最终值对应的整流桥的触发角为最小值,移相触发器的输入取软启动信号和PI控制器输出信号中的较小者,当软启动信号与PI控制信号两者相等时,完成由软启动向闭环控制的切换,这样既能完成软启动,又能实现系统的闭环控制,其控制原理如图7所示。

图7 带软启动的整流电路控制原理
2 测试结果及分析
图8为整流电路软启动控制信号的电压波形,图9为由运算放大器构成的整流电路PI控制器输出电压波形与移相触发器的输入电压波形。

图8 整流电路软启动控制信号波形
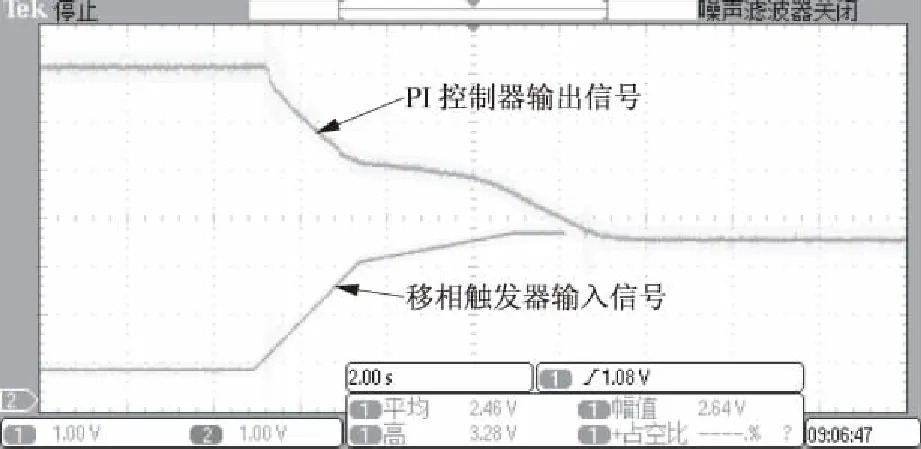
图9 整流电路PI控制器输出波形与移相触发器输入波形
从图8和图9可以看出,在整流电路运行的控制过程中,将PI控制器输出的电压信号与软启动电路输出的电压信号相比较,取其中的较小者作为移相触发器的输入。发送整流指示后,开始时由于信号调理后所反馈电压信号为0,PI控制器输出最大饱和值,随着软启动信号从0逐渐增大,当输出电压超过一定值时,PI控制器的输出信号减小,移相触发器的输入信号由软启动信号控制,直到PI控制器的输出信号小于软启动信号,移相触发器的输入信号切换到由PI控制器的输出信号控制,系统此后进入闭环控制。从图9可以看出,系统进入闭环控制状态后,PI控制器输出电压基本恒定,系统处于稳定状态。
图10是整流桥经滤波后的输出电压波形,启动后,输出电压由0开始缓慢上升,完成了电路的软启动。软启动完成后,切换到闭环控制,输出电压达到稳态时输出值为500 V。电路在整个工作过程中过冲很小,运行平稳,系统的电压误差很小,输出的纹波也很小。

图10 整流环节主电路输出电压波形
为了便于对比,图11给出了用Simulink仿真带软启动与直接闭环控制时整流环节输出的电压波形。对比2个波形可以看出:带有软启动的控制方案消除了启动时所产生的电压冲击,整流环节输出的电压从零开始平缓地增大,电路进入闭环控制后,达到稳态时输出电压稳定为500 V,整个过渡过程也比较短暂,设计的PI控制参数合理;没有软启动直接闭环控制时,启动时的冲击电压达到额定电压的2倍[8-9]。
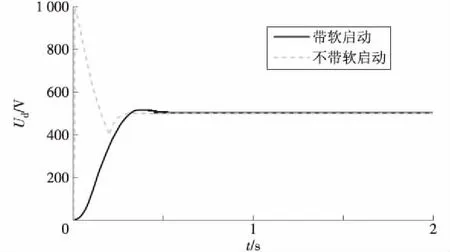
图11 整流环节Simulink仿真输出电压波形
3 结束语
根据集成移相触发器的输入与整流电路输出间的函数关系,采用线性化的方法推导出了用于描述集成触发器控制的三相整流电路动态特性的传递函数,为闭环控制系统的设计提供了理论基础。提出了一种软启动控制策略,减少了系统启动时的过冲,提高了系统启动的稳定性和可靠性。
参考文献:
[1]王兆安,刘进军.电力电子技术[M].5版.北京:机械工业出版社,2009.
[2]林渭勋.现代电力电子技术[M].北京:机械工业出版社,2006.
[3]秦茂,徐小方,孙新志,等.基于FPGA的可控硅移相触发控制器的实现[J].电测与仪表,2014,51(3):77-80.
[4]杨德刚,赵良炳,刘润生.三相高功率因数整流器的建模及闭环控制[J].电力电子技术,1999,33(5):49 - 51.
[5]廖晓钟,刘向东.控制系统分析与设计[M].北京:清华大学出版社,2008.
[6]杨智,范正平.自动控制原理[M].北京:清华大学出版社,2014.
[7]王耀辉,强天伟.PID控制原理简析[J].洁净与空调技术,2013(3):79-82.
[8]肖松松,荣军,李翔,等.三相桥式全控整流电路的建模与仿真[J].电子技术,2014,41(1):17-19.
[9]赵广元.MATLAB与控制系统仿真实践[M].北京:北京航空航天大学出版社,2012.
