计算机视觉结合无人机技术实现火控系统
2018-06-07李红燕
李红燕
(西北民族大学 电气工程学院,甘肃 兰州 730124)
飞行自动姿态控制技术在近几年有着突飞猛进的变化。国内的无人机行业起步于初级航模,随着对飞控算法的不断研究完善,消费级无人机做为一个引爆点,在2013年后从媒体和资本市场的宣传中彻底引爆,当拿着一架DJI Phantom3时,很难想象仅仅十年前还没有一架这样的飞行器飞在地球上,仅五年前这架飞行器上的绝大多数的技术难关还没有被攻克,仅一年前这架飞行器上的还没有智能跟随和智能识别兴趣点并确认环绕功能。一架无人飞行器浓缩了近二十年来,人类在系统控制论、空气动力学、机器智能算法和微电子集成芯片制造技术的智慧结晶。
1 四旋翼自动瞄准火控系统
四旋翼自动瞄准火控系统的结构架构图如图1所示。
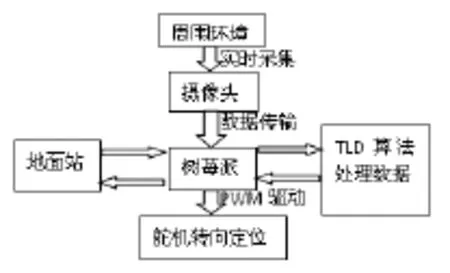
图1 四旋翼自动瞄准火控系统的结构架构图
采用ST公司生产的STM32F103RCT6作为飞控系统的主处理器。STM32系列基于装为高性能、低成本、低功耗的嵌入式应用而设计的ARM Cortex-M3内核。该芯片主要负责采集传感器检测到的姿态角速率、俯仰角速率、横滚角速率和偏航角速率、三轴的线加速度和航向信息并进行实时解算,同时接收来自火控系统部分的信号来实时调整飞行姿态和航向,根据检测到的飞行信息,结合既定的控制发难,计算控制量,通过无线通信模块与地面站进行数据采集和传输,实现接收控制命令改变飞行状态和下传飞行状态数据以及视频图像。
2 硬件与软件结合
2.1 硬件部分
(1)传感器模块。陀螺仪起到测量四旋翼飞行器的角速率的作用,加速度计在感应飞行器3个轴的线加速度中起作用。选用MPU6050集成模块实现对3轴上的旋转角度和重力加速度在3轴上的加速度分量。同时,惯性导航算法中,导航参数会随着传感器的测量误差积累而发散,因而不能满足长时间自主悬停的需要,故而将选用霍尼维尔公司的三轴式数字罗盘HMR3300模块对惯性导航系统进行姿态校准。

图2
(2)电机控制模块。采用PWM控制无刷直流电机的转速,由于无刷直流电机是功率器件,因此需要大电流驱动,故而需要专门的控制驱动芯片,在文章中使用蕴G9110来控制和驱动无刷直流电机。
(3)无线通信模块。无线通信模块是四旋翼飞行器和地面站之间通信的唯一桥梁,因此要求通信质量必须要准确。在该文中,要求的无线传输距离为100m左右,故选用NordicV蕴SI公司推出的单片射频收发器芯片nRF905。nRF905芯片工作在433MHz的ISM频段,工作电压为3.3V,使用SPI接口与STM32通信,配置和使用非常方便。此外,nRF905芯片功耗非常低,以-10dBm的输出功率发射时电流只有11mA,接收信号时电流只有12.5mA,在100m之内传输稳定可靠。
(4)火控系统模块。这部分模块集成了摄像头,主控芯片,射击器,其中主控系统选用了基于ARM架构的树莓派板载芯片作为主控芯片,其优点是可以在该芯片中烧录蕴inux系统同时在安装了摄像头驱动之后可以实现对图像的采集和处理,同时通过其上的无线网卡可以便捷的实现通过wifi来收发四旋翼的飞行数据和拍摄图像,结合无线通信模块可以实现扩展功能。
选用SG09舵机来控制火控系统射击部分和摄像头部分的朝向,由于以四旋翼飞行器为平台,搭载火控系统。因此,这对火控系统的重量要求严格,SG09舵机重量仅仅为9g,扭矩性能强悍,功耗低,转向精度准确,完全符合该项目的要求。通过加装两个舵机来实现再z轴上和x-y轴上的转向。
摄像头选用树莓派定制摄像头,拥有500万像素,高曝光率,低功耗,和树莓派主控芯片完美兼容,满足火控系统自动瞄准时对外部环境的实时采集。
射击部分使用微型电动PP弹连发仿真枪,其有效射程5米,可以在5m内击中目标,在该项目中使用气球作为假想象目标。
2.2 软件部分
四旋翼飞行器控制系统软件设计的总体目标是启动飞行控制系统的各个功能模块并使之能正常工作以及相互通信,使整体能够按照既定的规划实现飞行和精确打击。由于四旋翼飞行器为六自由度的系统,而其控制量只有4个,这就意味着被控量之间存在耦合关系,所设计的控制算法应能够对这种欠驱动系统足够有效,用4个控制量对3个角位移量和3个线位移量进行稳态控制。本研究在得到四旋翼飞行器的动力学方程之后,适当地选取控制量,运用控制理论中经典的PID控制算法对飞行器系统进行控制。
飞行控制系统的中央控制模块主要完成系统初始化、系统自检、解算传感器数据、导航信息解算、执行控制算法、计算并输出控制量等功能。控制模块选择使用μC/OS-II管理控制任务的调度。μC/OS-II是一个专为嵌入式应用设计、基于优先级调度的抢占式实时操作系统内核,包含了任务调度、任务管理、时间管理/任务间通信与同步等功能。各任务之间通过信号量和消息队列实现相互间的数据交换和同步。
火控系统的主控芯片主要负责在烧录了raspbian系统时驱动各个模块,使个摄像头能够对外界图像实时采集并且对采集到的数据进行分析处理,根据处理出来的参数调整舵机定位装置,使得射击器能够对准目标并且对目标实现打击。在控制模块中使用树莓派板的蕴inux系统驱动各个模块的工作,控制任务调度,并在其上配置Python环境,安装开源图像处理框架OpenCV,安装开源框架MJPG-Streamer,把摄像头挂载在树莓派上。使用树莓派的GPIO口,向舵机和射击装置发送PWM方波,使得舵机能够调整射击器和摄像头的朝向使其能够对准目标,并使射击器能够对目标进行精准打击,同时将视频流数据通过无线网卡连接wifi发送会地面站。
3 结语
顺应时代科技的发展和市场的需求,当前时代是人工智能时代,是实现以机器代替人工的时代。四旋翼飞行器是人类自动化控制理论和人工智能所结合的产品,在其上搭载火控系统可以实现部分士兵防卫的功能,在四旋翼飞行器上搭载了两个不同类型的主控芯片,并且在两个主控中烧录了不同的系统,在此情况下使两个系统之间能够协调工作。由于树莓派上搭载了无线网卡使得可以实现将WIFI网络作为信号传输媒介,最高传输速度可达到10Mbps,可以实现对摄像头实时数据的传输,并且基本不用担心网络延迟的问题。自动瞄准火控系统,自主的识别打击目标,并对该目标进行自动跟踪瞄准,之后给予打击。此设计的创新在于:使用完全无人控制方式实现四旋翼飞行器的飞行,以定点悬停为主,解放了人的控制;在无人的基础上支持通过无线控制器对四旋翼飞机进行控制,多种控制方式并行,使系统更完美;在火控系统中使用了计算机视觉处理算法来实现对目标的自动瞄准;利用wifi网络将四旋翼飞行器上的数据发送给地面站,使通信成本在大大降低的同时,还能保证通信效果;整个设计中运用了自动化控制理论,具有智能化。
[1] 马玉真,陶立英,王新华.计算机视觉技术的应用[J].试验技术与试验机,2006,(1).
[2] 赵晓霞.计算机视觉技术在农业中的应用[J].科技情报开发与经济,2004,(4).
[3] 张启元.无人机航测技术在高寒地区基本农田测绘中的应用[J].青海大学学报(自然科学版),2014,(2).
[4] 郑岩,谭庆昌,王树范,等.车载火控系统自动跟踪的卡尔曼滤波[J].红外与激光工程,2010,(2).
[5] 陈希林,傅裕松,尉洵楷.机载光电瞄准系统的现状及发展[J].红外技术,2004,(2).
