一种物料抓取机器人的运动学研究
2018-06-02袁镜江袁志坚林清霖林清荣
袁镜江,袁志坚,林清霖,林清荣
(1.广东电网有限责任公司东莞供电局,广东东莞 523000;2.国机智能科技有限公司,广东广州 510535)
0 引言
机器人生产是近年来人们在生产中摸索出的一种新型生产方式,能有效加快生产速度,提升生产效率。因此,对机器人的应用研究也越来越广泛。通过对物料抓取机器人运动学中的驱动应用、在运动中的正解及反解分析研究,能够找到适合机器人运动的研究思路,并且在研究中找到提升机器人运动能力的切入点。这对提升机器人的运动生产能力具有重要意义。
1 机器人运动机械臂三维图形自由度分析
在机器人的运动学研究中,首要进行的就是对机械臂三维图形的自由度分析。只有这样,在其三维图形及自由度的分析中,才能及时掌握机器人运动的原理以及运用运动原理提升效率[1]。图1是机器人运动机械臂三维图。整个机械臂由一组机架、1个大臂、1个小臂、1个末端执行器、1个连杆、1个摇杆及大臂油缸和末端油缸组成:机架负责整个机械臂的受力支撑,有连杆、摇杆、大臂油缸以及大臂组件和其相连。在机械臂的活动应用中,各个组件通过活塞式旋钮进行连接,可以实现机械臂的自由旋转运动。
对机械臂和机械臂机架(图2)进行应用分析后,将其数据应用代入自由度计算公式,得到式(1)。

式中n—— 机械臂中的活动构件数量
P1— 低副数
PH— 高副数
将n代入为10,P1代入为14,PH带入为0,最终推导出机器人运动自由度数值为2。也就是说,当末端执行器的数值运动在自由度为2时,能够实现最大化转体自由度[2]。
2 物料抓取机器人运动过程分析

图1 机器人运动机械臂三维图
对机器人运动过程进行专门分析,能有效解析机器人的运动过程以及运动中的着力情况[3]。从图2可以看出,机器人的机架结构为串并联式混合结构,这种结构利用传统的解析法很难控制好分析中的数值。所以,需要借助闭合式云顶链条思想将整个机械臂的运动拆分,进行机械臂的运动分析后,通过对分析数据的处理,将整个数据的应用进行几何关系转换,建立机械臂拆分坐标(图3)。

图2 机器人运动机械臂机架示意

图3 机械臂运动结构参数坐标对比示意
2.1 正解分析
在已知机械臂的液压缸尺寸之后,对其末端执行器进行了专门的分析和设置,通过运动学的数据正解带入,将整个运动过程进行了拆分[4],得到具体的拆分数据结构关系。
2.1.1 闭式运动链L2
从图3可以看出,L2是已知平面内的4杆结构之一。假设其自由度为1,驱动输入由液压缸S1提供数值,在带入余弦定理之后,能够得到以下数据。

按照上述公式中的对比关系,将a2和a3带入式(2),可以推导出其余数值关系[5]。
2.1.2 闭式运动链L3
已知L3是组件7的架构组成,设定自由度为2。按照其数据架构之间的对比关系,设整体的数据几何关系L2,L3表述见式(3)。

其中,α代表数据的对应关系,φ代表机架构成中的固定几何参数,β代表可确定的机架结构模块。按照余弦定理可以推算得出:
按照上面的分析将整个闭式运动链的推导关系进行了转换,经过转换后的数据分别带入到上述各式,求出剩余的β值。
2.1.3 整体机架分析
按照机械臂的运动结构分析,结合构件矢量关系进行详细的数据坐标方程处理,通过对其方程中的数据转换关系分析,最终得出整个数据的对比方程[6]。假设在方程的液压关系转换中,其数据的基本机构以及长度值均为已知,将其数值带入坐标轴,用X表示OA及其他对角之间的关系φ。整理后有以下关系:

按照式中的关系将整体的数据进行带入转换,通过转换后的数据能够被应用到现实的数据关系处理中,经过处理的数据能够进行专门性的对比,并且能够按照位置关系的对比进行数据的表达转换带入[7]。
2.2 反解分析
在机器人的运动学分析中,除了要对其运动的正解分析,还需要对其运动进行反解分析处理,保障在反解分析处理下,能够实现数据的对比关系转换。在进行反解分析中,采用的是已知末端执行器位置和姿态为已知条件,并且将其结构关系中的液压缸转换以及驱动S1和S2的尺寸转换方程进行数据带入分析,经过分析之后的数据结果及为机械臂架构的反解结果。具体的方程表述见式(6)和(7)。
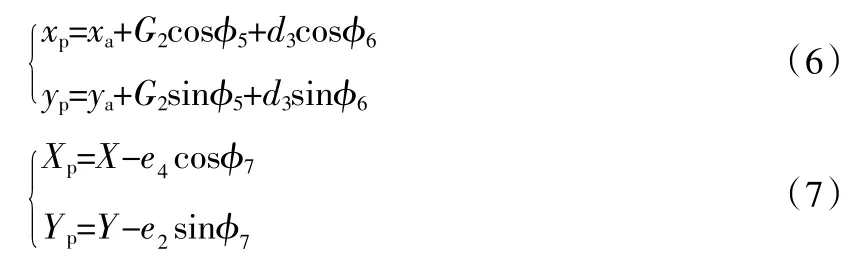
通过对上式中的数据分析可以得出φ的最终值,并且能够在φ的推导中,按照数据关系找出对比数据Y值,也就是最终的液压缸的驱动尺寸。
3 物料抓取机器人运动学分析数值算例
在对机器人的运动分析中,需要对其运动学数值进行专门的分析,通过分析转换得到最终的数值算例。假设已经给定的2组数值,在其对比关系上符合驱动尺寸的设计应用,这种状况下需要对其数值进行专门的分析,保障通过分析之后,可以得到杆件之间的夹角关系。对比数据表格关系见表1。
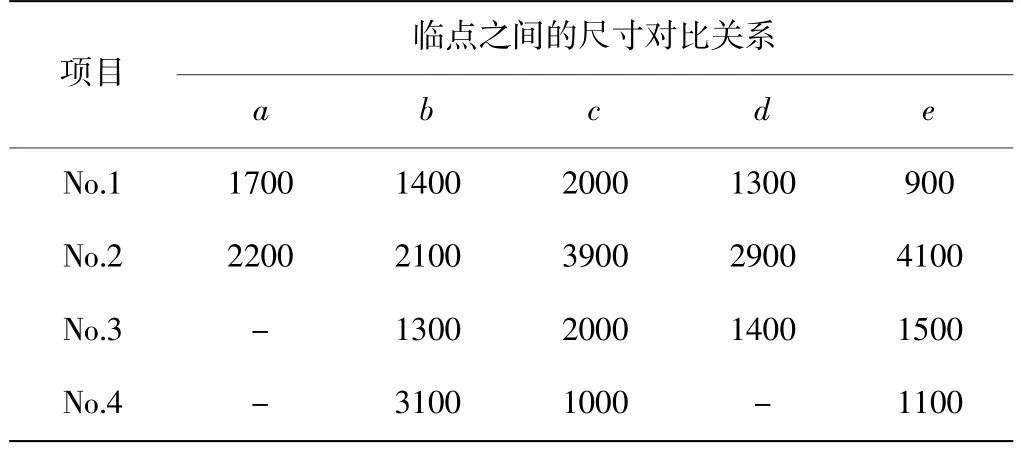
表1 机器人机械运动数据临点尺寸关系对比mm
通过对其驱动尺寸之间的对比关系分析,得出相邻的杆件角度关系 Φ1=120°,Φ2=130°,Φ3=160°,而 Φ4=60°。其中与坐标轴X相交的Φ5=100°,将已经推导出的数据进行5组数值转换带入,最终得到机械臂运动的姿态及反解液压缸的最佳尺寸。具体的数据见表2和表3。

表2 机械臂运动姿态位置对应关系mm

表3 反解压数据驱动尺寸对比mm
由表2、表3可以看出,在已知条件明确的液压缸尺寸对比中,整体数值会随液压缸内的数据变化而改变。这充分验证了数据关系带入之后的效果对比关系,证实机器人反解数值的求导是正确的。同时也说明,在物料抓取过程中,机器人的运动会随着液压状态转变而变化,需要加强对其变化中的数据带入进行研究,以便找到适合机器人管理和应用的数据关系对比,确保数据的真实性和机器人的运动安全。
4 结语
针对物料抓取机器人的运动学研究主要从三维图形自由度着手,通过对运动过程的正解分析和反解分析,推算出物料机器人的运动学分析数值算例。在此基础上,进行物料机器人的运动姿态以及驱动尺寸对照分析,得出适合物料机器人运动的最佳驱动尺寸,并按照运动需求进行了新型机器人串并联机械臂设计。通过对机器人运动学中的正反解分析,推导出5组运动学数值算例,经数值带入后验证了正反解的正确性,确保机器人运动学研究的结果准确,为未来的运动学研究提供新思路。
[1]李峰,张雪松,岳云,等.一种基于逆向运动学分析的物料抓取机器人自导航系统[J].食品与机械,2016,16(5):81-85.
[2]杨文栋.物流机器人方案设计及运动学、动力学研究[J].西安理工大学学报,2016,36(15):145-147.
[3]卢宏琴.基于旋量理论的机器人运动学和动力学研究及其应用[D].南京:南京航空航天大学,2007.
[4]郑华,陈军,金鸿章.SCARA机器人运动学和视觉抓取研究[J].组合机床与自动化加工技术,2017,16(6):50-53.
[5]董文辉.基于机器视觉的工业机器人抓取技术的研究[J].华中科技大学学报,2014,16(3):125-127.
[6]刘庆运,钱瑞明,颜景平.机器人多指手抓取运动学研究综述[J].机械科学与技术,2016,25(8):967-971.
[7]刘志全,危清清,王耀兵.载人航天器柔性机械臂的动力学建模方法[J].航天器工程,2016,22(5):34-41.
