吊杯式移栽机构中番茄穴盘苗运动分析优化与试验
2018-05-31毛罕平李亚雄
刘 洋 毛罕平 王 涛 李 斌 李亚雄
(1.江苏大学现代农业装备与技术教育部重点实验室, 镇江 212013; 2.新疆农垦科学院机械装备研究所, 石河子 832002;3.江苏省农业装备与智能化高技术研究重点实验室, 镇江 212013)
0 引言
吊杯式移栽机可以满足铺膜移栽的要求,在我国西北地区加工番茄育苗移栽种植过程中得到广泛应用[1-2]。吊杯式移栽机构上的投苗杯向栽植器喂苗时,番茄穴盘苗与栽植器的碰撞使苗钵质量受损,这会影响番茄穴盘苗的移栽成活率[3]。
孙裕晶等[4]研究了穴盘苗不同运动初始速度条件下与导苗管的碰撞运动;宋建农等[5]研究了水稻穴盘苗在导苗管中抛出速度和距离之间的关系;张国凤等[6]利用高速摄像机观察了水稻穴盘苗与导苗管的碰撞运动;以上研究中移栽机的导苗管相对机架固定不动,而吊杯式移栽机的栽植器相对机架做平面运动,穴盘苗与栽植器的碰撞运动非常复杂。王英等[7]为了降低西兰花穴盘苗移栽时苗钵的破损率,以苗钵体积、苗龄和含水率为试验因素,通过正交试验得到苗钵破损最小的参数组合;陈建能等[8-9]研究了西兰花穴盘苗与栽植器的碰撞运动过程,并建立了西兰花苗钵的运动微分方程,以自动取苗为研究基础,认为西兰花穴盘苗具有相同的下落姿态,忽略了苗茎对碰撞运动的影响。
对于吊杯式移栽机,投苗杯将番茄穴盘苗投落时,下落姿态具有随机性,会使番茄穴盘苗的不同部位与栽植器发生碰撞,这会改变番茄穴盘苗的运动速度和姿态,使番茄穴盘苗与栽植器发生二次碰撞,导致苗钵质量受到影响。针对这个问题,本文对碰撞进行接触力学和运动分析,优化得到减小苗钵质量损失的工作参数。
1 番茄穴盘苗与栽植器碰撞过程
吊杯式移栽机构的结构如图1所示。工作时,投苗杯将番茄穴盘苗投落,番茄穴盘苗做自由落体运动,落入绕定轴匀速转动的栽植器。在这个过程中,番茄穴盘苗与栽植器发生碰撞。
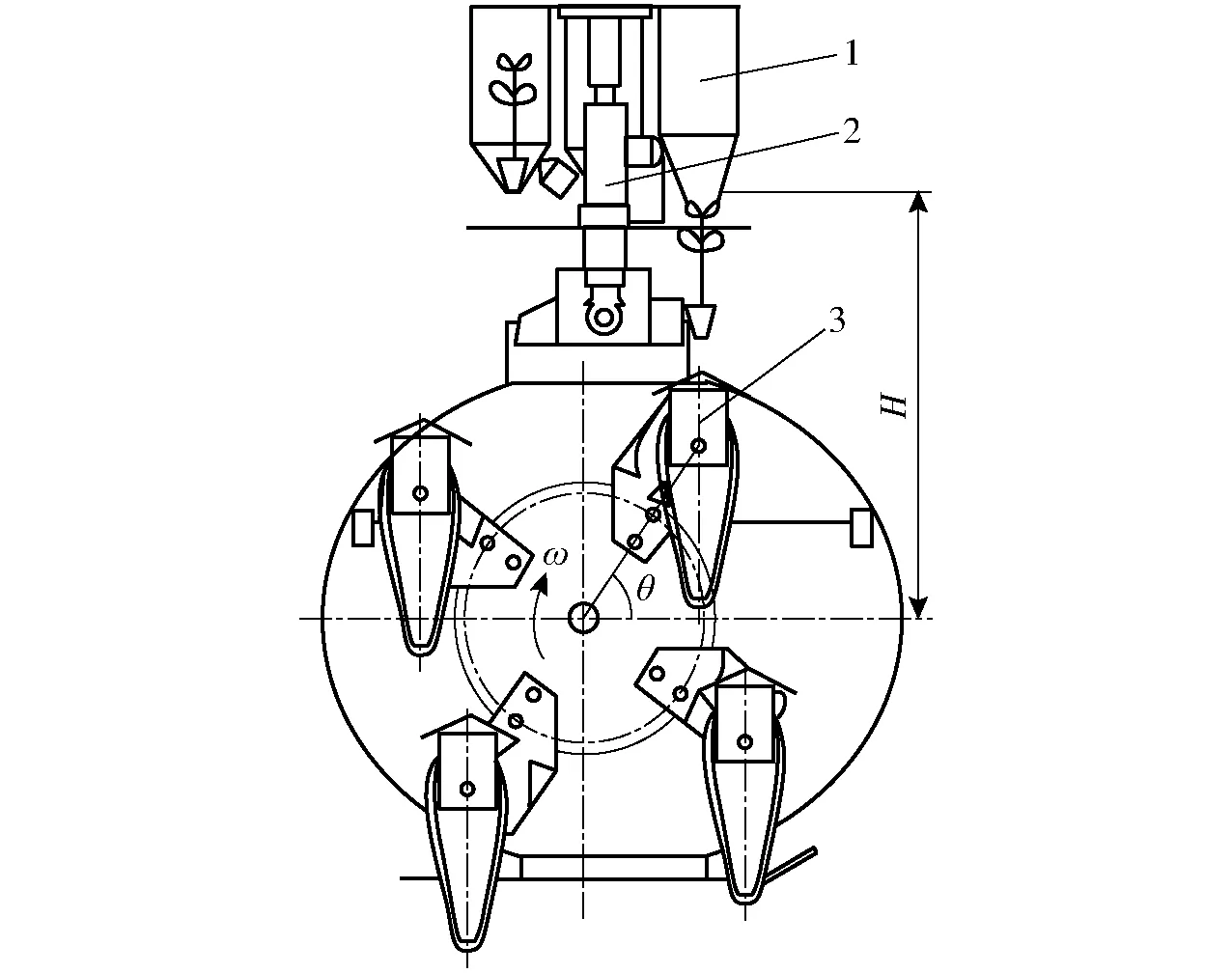
图1 移栽机构结构简图Fig.1 Schematic diagram of transplanting mechanism1.投苗杯 2.喂苗装置 3.栽植器
2 接触力学分析
根据赫兹理论[10],将苗钵与栽植器的碰撞定义为柔性体与刚性平面的碰撞,由王英等[7]研究得出的结论可知苗钵与栽植器碰撞过程中的最大接触力Fmax为
(1)
其中
式中E1——栽植器弹性模量
E2——苗钵弹性模量
γ1——栽植器泊松比
γ2——苗钵泊松比
M——栽植器质量
m——苗钵质量
r——苗钵碰撞部位半径
vN——碰撞方向上苗钵相对栽植器的速度
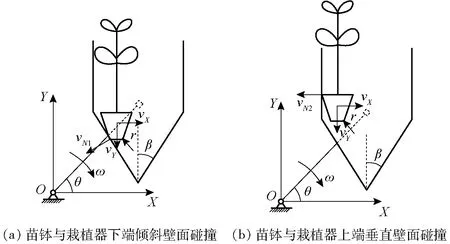
图2 苗钵与栽植器碰撞示意图Fig.2 Schematic diagrams of collision between root lump and planting device
栽植器内壁面上端垂直,下端呈锥角。番茄穴盘苗落入栽植器内部时,苗钵会与栽植器的上端垂直壁面或者下端倾斜壁面碰撞(图2)。建立惯性坐标系XOY,碰撞前番茄穴盘苗做自由落体运动,它的角速度ω1=0,水平方向速度vX=0。
碰撞时番茄穴盘苗在垂直方向速度vY为
(2)
式中H——投苗杯与栽植器转动轴在垂直方向的距离
g——重力加速度
R——栽植器的转动半径
θ——处于接苗状态的栽植器的转动半径与水平面间的夹角,即接苗角(图1)
因为碰撞时间很短,忽略碰撞时的摩擦力,苗钵与栽植器的碰撞方向垂直于接触平面。当苗钵与栽植器下端倾斜壁面碰撞时,碰撞方向的相对运动速度vN1为
(3)
式中ω——栽植器角速度
β——栽植器下端倾斜壁面与垂直面间夹角
当苗钵与栽植器上端垂直壁面碰撞时,β=0°,此时碰撞的相对运动速度vN2为
vN2=ωRsinθ
(4)
刘姣娣等[11]报道番茄苗钵的弹性模量为3×106Pa,苗钵的泊松比没有相关文献,这里参考黄土的泊松比0.44[7,12]。对式(3)、(4)进行赋值,相关参数值见表1。利用Mathematica软件可以得到ω和θ对vN1和vN2的影响曲面(图3)。可以看出,在ω和θ的交互作用下,vN1始终大于vN2。由式(1)可知,Fmax与vN成正比例关系,因此在研究ω和θ对Fmax的影响时,只需对苗钵与栽植器的下端倾斜壁面碰撞进行分析。
表1 接触分析的相关参数Tab.1 Related parameters of contact analysis
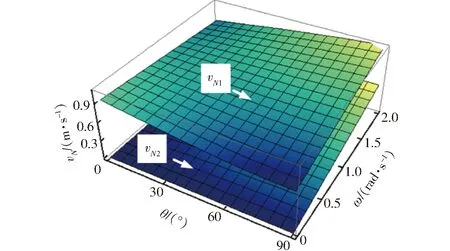
图3 ω和θ对vN的影响曲面Fig.3 Effect surface of ω and θ on relative velocity vN
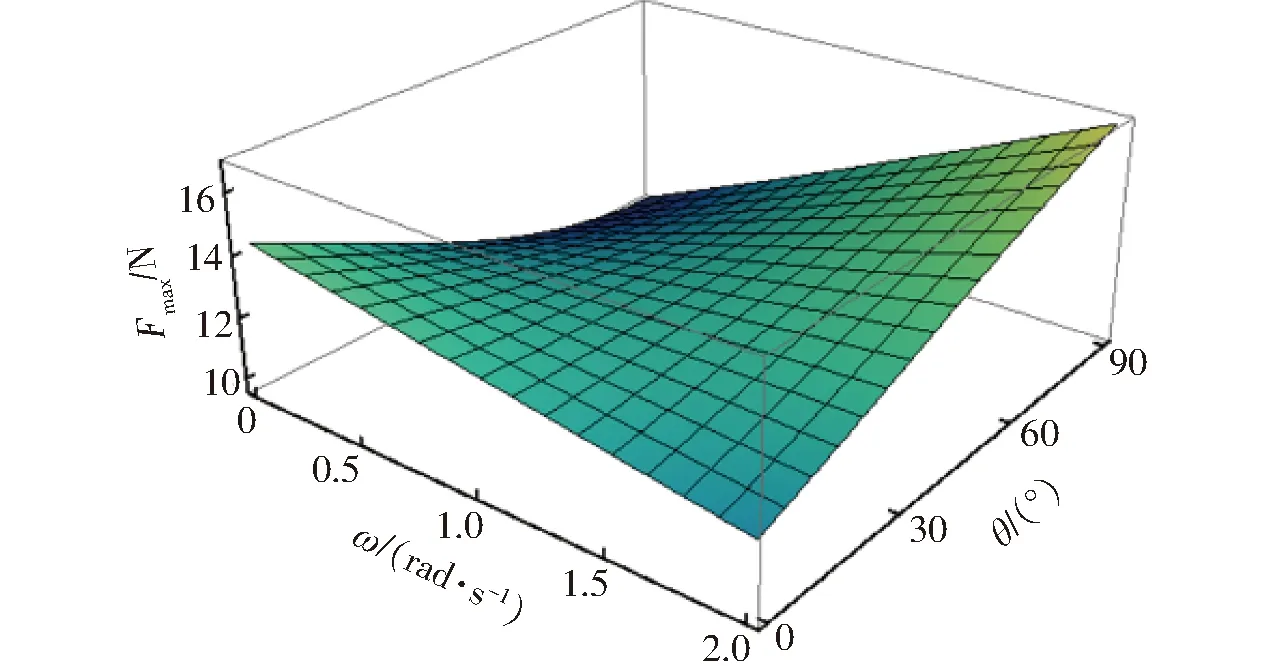
图4 ω和θ对Fmax的影响曲面Fig.4 Effect surface of ω and θ on maximum contact force Fmax
由式(1)、(3)可得ω和θ对Fmax的影响曲面(图4)。可以看出,当ω取较小值时,Fmax随着θ的增大而减小,当ω取较大值时,Fmax的变化相反;当θ固定在较小值时,Fmax的变化并不明显,但是当θ固定在较大值时,Fmax随着ω的增加而增大。
受劳动强度的限制,人工移栽频率一般小于50株/min,取移栽频率为45、50株/min进行研究。移栽机构上一般设置4个栽植器(图1),此时栽植器的角速度ω为1.18、1.31 rad/s。可以计算得,当ω为1.18 rad/s时,随着θ的增大,Fmax从12.75 N增加到13.87 N;当ω为1.31 rad/s时,Fmax从12.67 N增加到14.19 N。
3 碰撞运动分析
番茄穴盘苗被投落后,会发生不同部位与栽植器碰撞,可以将碰撞分为苗钵与栽植器碰撞以及苗茎与栽植器碰撞两种类型,下面分别对这两种碰撞进行分析。
3.1 苗钵与栽植器碰撞
将番茄穴盘苗简化为球柄形状碰撞模型(图5),建立惯性坐标系XOY,沿着栽植器下端倾斜壁面建立相对坐标系X′O′Y′。

图5 苗钵与栽植器碰撞模型Fig.5 Collision model between root lump and planting device
冲量定理和冲量矩定理为[13]
mv′CX′-mvCX′=∑IX′
(5)
mv′CY′-mvCY′=∑IY′
(6)
JCω2-JCω1=∑MC(I(e))
(7)
式中IX′、IY′——X′和Y′方向的碰撞冲量
MC(I(e))——碰撞冲量对质心C矩的几何和
JC——碰撞模型绕质心C的转动惯量
vCX′、v′CX′——碰撞前、后质心C在X′方向的速度
vCY′、v′CY′——碰撞前、后质心C在Y′方向的速度
ω1、ω2——碰撞前、后模型的角速度
忽略碰撞摩擦力,X′方向的碰撞冲量IX′=0。由式(5)可得
(8)
将式(2)沿Y′方向分解可得
(9)
由式(6)、(9)可得
(10)
由式(7)可得
JCω2=IY′(d+r1)cosβ
(11)
其中
(12)
式中d——模型质心C到球A的距离
r1——球A的半径
l——碰撞模型杆的长度
m1、m2——球A和杆的质量
以质心C为基点,碰撞后球A的速度v′A为
v′A=v′C+v′AC
(13)
式中v′C——碰撞后质心C的速度
v′AC——碰撞后球A相对质心C的速度
将式(13)分别沿X′和Y′轴投影,则碰撞后球A在这两个方向的速度v′AX′和v′AY′为
v′AX′=v′CX′+ω2(d+r1)sinβ
(14)
v′AY′=v′CY′+ω2(d+r1)cosβ
(15)
忽略碰撞摩擦力,模型与栽植器碰撞的法线方向垂直于倾斜壁面。在碰撞法线方向上,苗钵与栽植器的碰撞恢复系数k1的表达式为
(16)
由式(10)、(11)、(14)、(15)、(16)可得出v′AX′、v′AY′和ω2为

(17)

(18)

(19)
则速度v′A为
(20)
对式(19)、(20)中各参数赋值[14-15],相关参数见表1、2,可以得到ω和θ对v′A和ω2的影响曲面。

表2 碰撞分析的相关参数Tab.2 Related parameters of collision analysis
图6是ω和θ对v′A的影响曲面。可以看出,当ω取固定值时,v′A随着θ的增大而减小;当θ固定在较小值时,随着ω的增加,v′A变化很小;当θ取较大值时,v′A随着ω的增加而增大。可以计算得,当ω取1.18、1.31 rad/s时,随着θ的增加,v′A分别从2.84 m/s减小到2.16 m/s和从2.83 m/s减小到2.17 m/s。
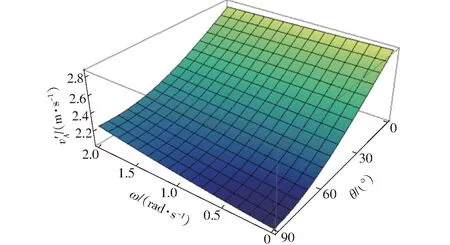
图6 ω和θ对v′A的影响曲面Fig.6 Effect surface of ω and θ on velocity v′A
图7是ω和θ对ω2的影响曲面。可以看出,当ω取固定值时,ω2随着θ的增大而减小;当θ取较小值时,ω2随着ω的增加而增大,但是当θ取较大值时,ω2的变化趋势刚好相反。ω为1.18 rad/s时,随着θ增大,ω2从-7.42 rad/s减小到-2.18 rad/s;ω为1.31 rad/s时,ω2从-7.56 rad/s减小到-1.79 rad/s。
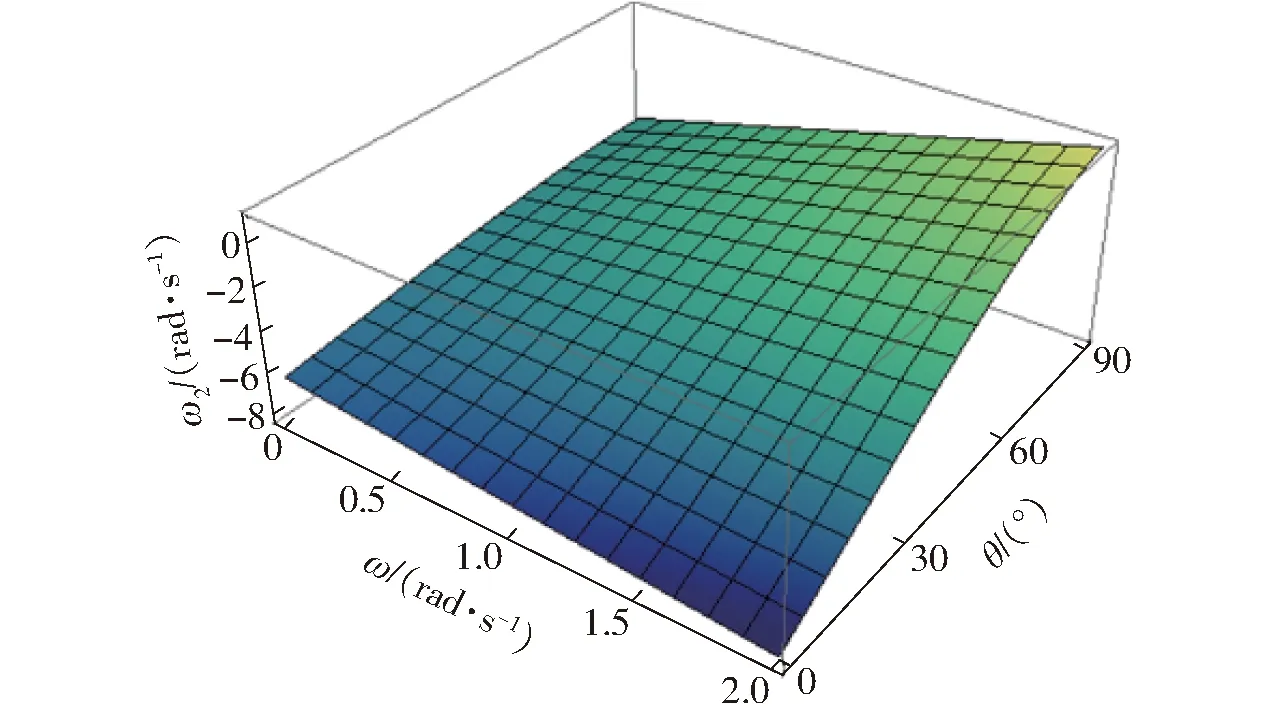
图7 ω和θ对ω2的影响曲面Fig.7 Effect surface of ω and θ on angular velocity ω2
3.2 苗茎与栽植器碰撞
苗茎与栽植器的碰撞如图8所示,建立惯性坐标系GOU,沿着番茄穴盘苗倾斜方向建立相对坐标系G′AU′。

图8 苗茎与栽植器碰撞模型Fig.8 Collision model between stem and planting device
依然利用冲量和冲量矩定理,G′方向的冲量IG′=0,碰撞后模型质心C在G′方向的速度u′CG′为
(21)
式中α——模型下落倾斜角度
U′方向的冲量IU′为
(22)
式中u′CU′——碰撞后模型质心C在U′方向的速度
由冲量矩定理可得
JCω3=IU′(b-d)
(23)
式中ω3——碰撞后模型的角速度
b——碰撞点D到球A的距离
以模型的质心C为基点,碰撞后模型上点D的速度u′D为
u′D=u′C+u′DC
(24)
式中u′C——碰撞后质心C的速度
u′DC——碰撞后点D相对质心C的速度
将式(24)沿U′轴投影,则碰撞后点D在U′方向的速度u′DU′为
u′DU′=u′CU′+(b-d)ω3
(25)
忽略碰撞摩擦力,碰撞模型与栽植器碰撞点的法线方向垂直于球柄。在碰撞法线方向上,苗茎与栽植器的碰撞恢复系数k2的表达式为
(26)
由式(22)、(23)、(25)、(26)求解得u′CU′和ω3为

(27)

(28)
以质心C为基点,可以求得碰撞后球A在G′和U′方向的速度u′AG′和u′AU′为
(29)

(30)
则球A碰撞后的速度u′A为
(31)
对式(28)、(31)中各参数赋值,研究ω、θ、α和b对u′A和ω3的影响,相关参数值见表1、2。图9是ω和θ对u′A的影响曲面。可以看出,当ω取固定值时,u′A随着θ的增大而减小;当θ取较小值时,随着ω的增加,u′A的变化并不显著,但是当θ取较大值时,u′A随着ω的增加而增大。可以计算得,ω为1.18 rad/s时,随着θ的增加,u′A从2.75 m/s减小到2.18 m/s;ω为1.31 rad/s时,u′A从2.74 m/s减小到2.19 m/s。

图9 ω和θ对u′A的影响曲面Fig.9 Effect surface of ω and θ on velocity u′A
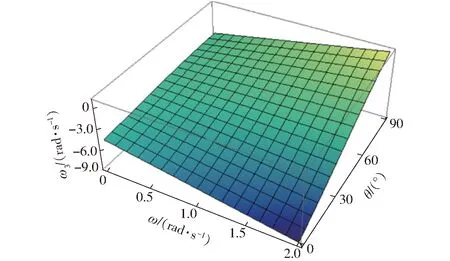
图10 ω和θ对ω3的影响曲面Fig.10 Effect surface of ω and θ on angular velocity ω3
图10是ω和θ对ω3的影响曲面。可以看出,当ω取固定值时,ω3随着θ的增大而减小;当θ取较小值时,ω3随着ω的增加而增大,但是当θ取较大值时,ω3的变化趋势刚好相反。可以计算得,当ω取1.18、1.31 rad/s时,随着θ的增加,ω3分别从-8.47 rad/s减小到-2.07 rad/s和从-8.81 rad/s减小到-1.71 rad/s。
图11是α和b对u′A的影响曲面。可以看出,当b取固定值时,u′A随着α的增大而减小;当α取较小值时,u′A几乎无变化,但是当α取较大值时,随着b的增加,u′A的变化呈凹线。由式(30)可知,当b=d时,u′AU′取最小值,而u′AG′与b无关。因此可知,当碰撞点D与质心C重合时,u′A取最小值,此时u′A在凹线的最低点。
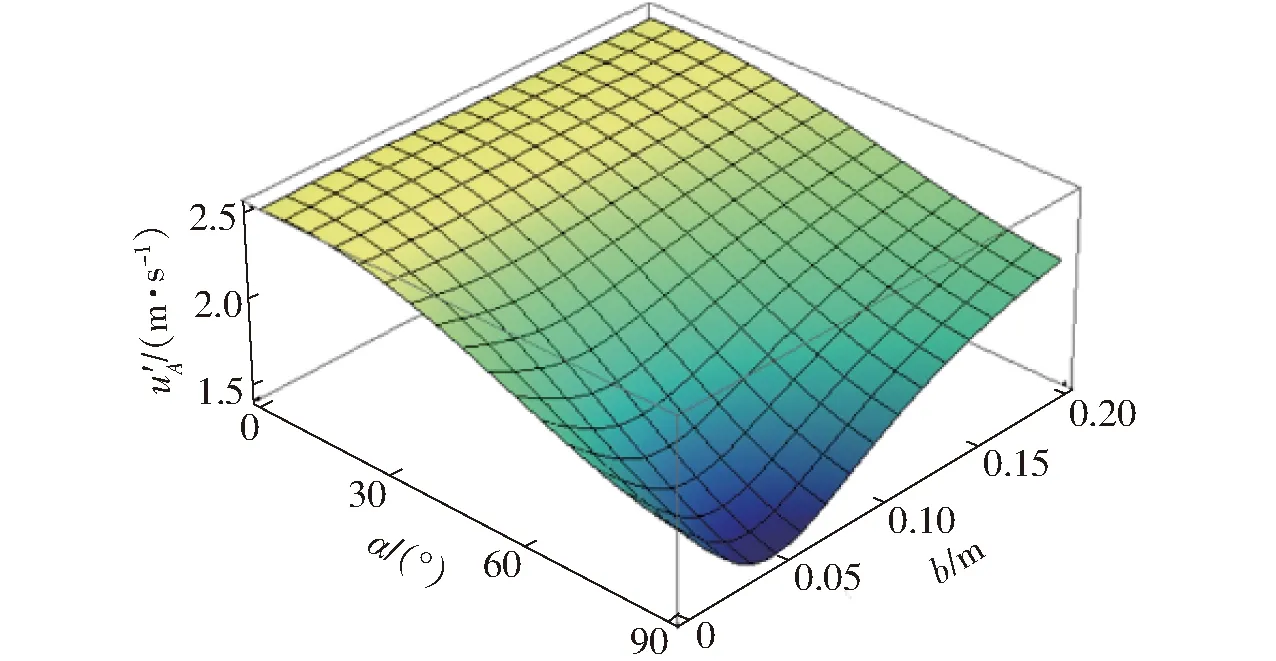
图11 α和b对u′A的影响曲面Fig.11 Effect surface of distance b and incline angle α on velocity u′A
图12是α和b对ω3的影响曲面。由式(28)可知,当b=d时,ω3为0,此时番茄穴盘苗做平动。由图12可以看出,当碰撞点D远离质心C时,随着α的增加,ω3逐渐增大;但是碰撞点D在质心C的两侧时,ω3的方向相反。

图12 α和b对ω3的影响曲面Fig.12 Effect surface of distance b and incline angle α on angular velocity ω3
4 工作参数的优选
4.1 移栽机构工作参数的选择
番茄穴盘苗下落进入栽植器时,会发生直接碰撞和二次碰撞,为了减小碰撞时苗钵质量的损失,应减小苗钵最大受力Fmax、番茄穴盘苗角速度ω2和ω3、以及苗钵运动速度u′A和v′A[16-17]。但是通过第3节的分析可知,ω取1.18、1.31 rad/s时,为了减小Fmax,需要减小θ,然而为了减小其余的工作参数,则需要增大θ。为此,用目标规划法建立多目标优化函数,对θ进行优化[18]。
将式(1)、(19)、(20)、(28)、(31)定义为子目标函数,把它们建立成一个新的目标函数

(32)
式中W1、W2、W3、W4、W5——子目标函数加权因子

用目标函数值的容限法求各子目标函数的加权因子Wi,计算公式为[18]
(33)
式中αi、βi——各子目标函数的最小值和最大值,i=1,2,3,4,5
将表1~3中的参数代入式(32),得到θ的优化曲线(图13)。可知当ω为1.18、1.31 rad/s时,取θ为72.8°和70.9°,可以使f(θ)为最小值。移栽作业时,移栽频率会在45~50株/min之间变化,可以取θ=72°作为最优化结果。
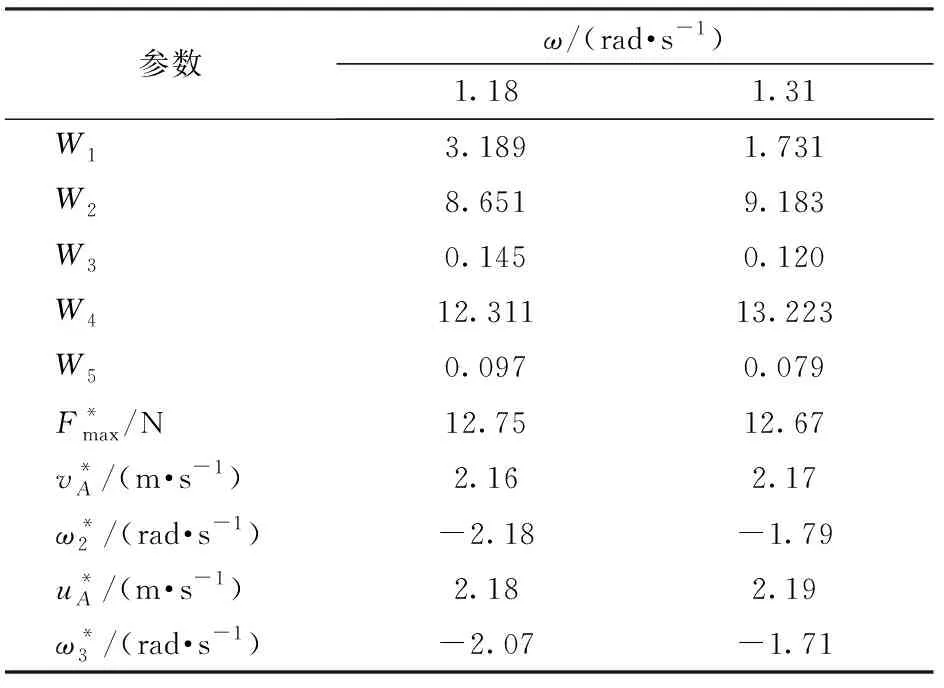
表3 多目标优化函数相关参数取值Tab.3 Related parameters of multi-objectiveoptimization function
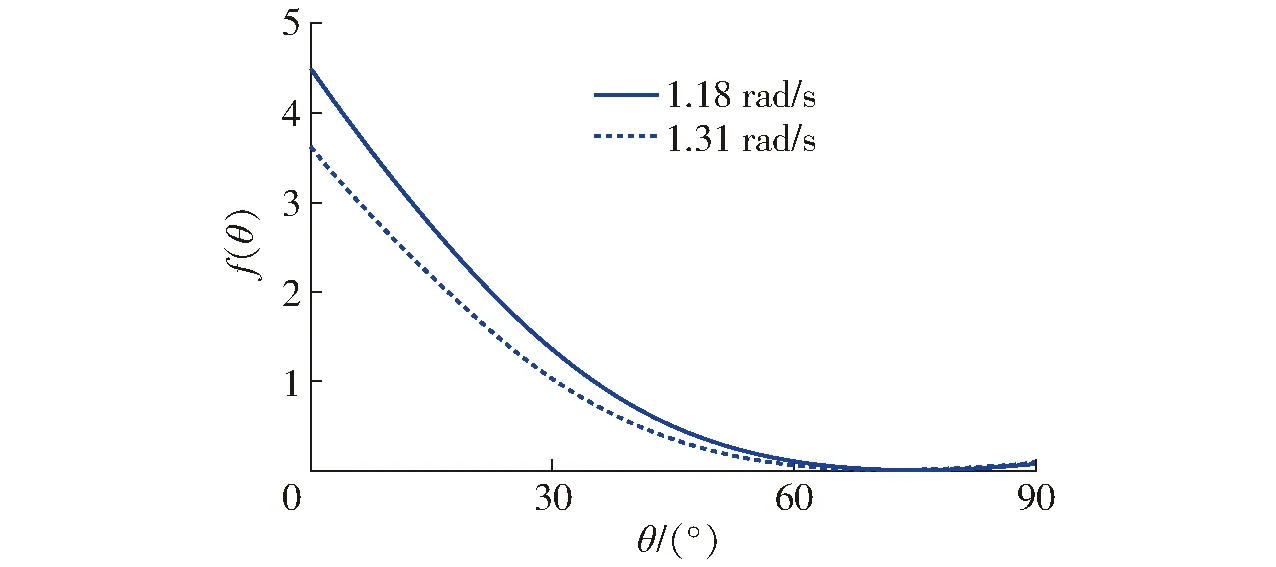
图13 接苗角θ的优化曲线Fig.13 Optimized curves of contact angle θ
4.2 番茄穴盘苗株高的选择
由图11、12的分析可以得出,减小碰撞点D到质心C距离,可以减小角速度ω3和速度v′A。当碰撞点D在质心C下方时,ω3的方向为正值,此时与图8中ω3的方向相同,番茄穴盘苗会转动到栽植器外侧,导致喂苗失败。这些都可以通过降低番茄穴盘苗的株高,缩小番茄穴盘苗两端到质心的距离来减少或避免。加工番茄穴盘苗在移栽时株高范围为12~19 cm,因此株高取12 cm为最优值。
5 试验验证
为了验证理论分析中番茄穴盘苗与栽植器的碰撞行为和优化得到的工作参数的性能,分别进行高速摄像和苗钵破碎性试验。
5.1 试验材料与方法
试验用128孔穴盘育苗,育苗基质由草炭、珍珠岩和蛭石按3∶1∶1体积比混合后装盘[19]。试验时,苗龄45 d,株高12~19 cm,苗钵含水率50%~55%。移栽机构由调速电动机驱动,可以通过调整调位板改变栽植器的接苗角(图14)[20]。高速摄像机型号TS3- 100L(美国FASTEC公司),试验时拍摄速率为500幅/s。
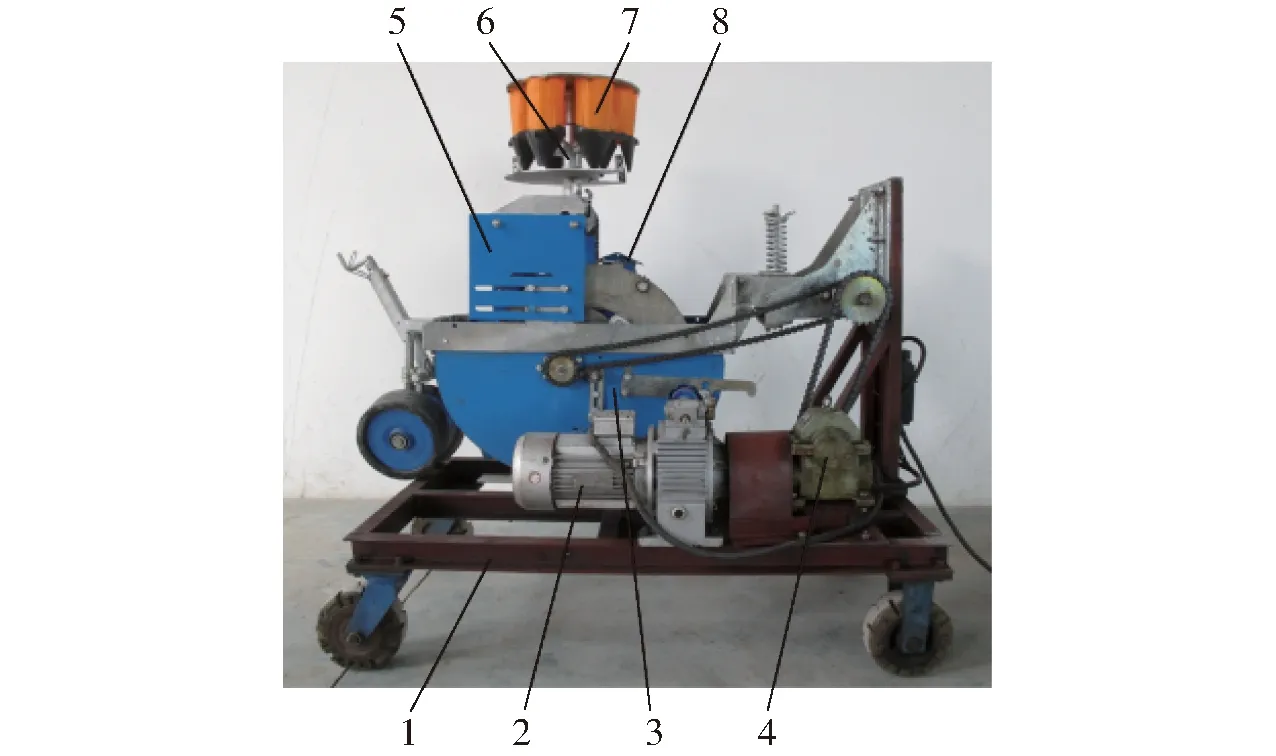
图14 吊杯式移栽机构试验台Fig.14 Test bed of basket-type transplanting mechanism1.试验台架 2.调速电动机 3.移栽机构 4.齿轮箱 5.调位板 6.喂苗装置 7.投苗杯 8.栽植器
试验共进行8组(表4),其中试验1和5为优化得到的参数,其它参数组合分别改变接苗角或番茄穴盘苗株高。高速摄像试验在试验1条件下进行,8组试验全部进行苗钵破碎性试验。进行苗钵破碎性试验时,每组试验喂苗600株,计算番茄穴盘苗质量损失的百分比P[21]。
(34)
式中M1、M2——试验前、后所有番茄穴盘苗质量
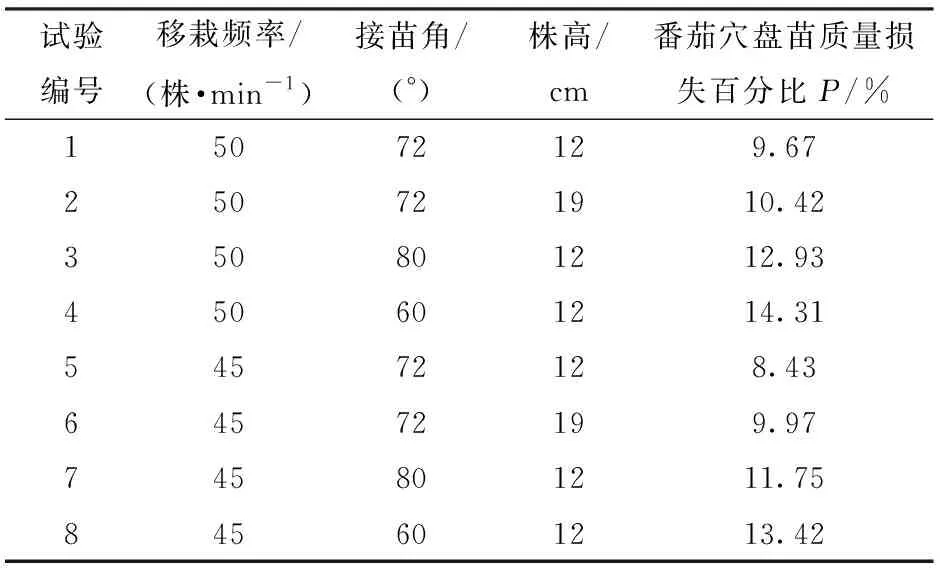
表4 试验参数和结果Tab.4 Test parameters and results
5.2 试验结果与分析
高速摄像试验中,很难清晰地分辨出番茄穴盘苗下落倾斜角和碰撞点位置变化对运动速度和姿态的影响,在这里选择常出现的苗钵与栽植器碰撞以及苗茎与栽植器碰撞进行分析。
图15是苗钵与栽植器的碰撞运动。可以看到,在0.024 s时苗钵与栽植器发生碰撞,碰撞后番茄穴盘苗相对栽植器发生平移和转动,0.046 s时刻,红圈中是苗钵上散落的育苗基质颗粒,0.062 s时苗茎与栽植器发生二次碰撞,0.070 s时番茄穴盘苗下落到栽植器底部,碰撞运动结束。图16是苗茎与栽植器碰撞的运动。可以看到,在0.018 s时苗茎与栽植器发生碰撞,碰撞后番茄穴盘苗相对栽植器摆动的同时下落,0.042 s时苗钵与栽植器发生二次碰撞,0.056 s时番茄穴盘苗相对栽植器的运动停止。
通过高速摄像试验可以看出,苗钵与栽植器的碰撞属于弹塑性碰撞[3],苗钵和苗茎与栽植器碰撞后,番茄穴盘苗的运动速度和姿态都发生改变,并发生二次碰撞。
番茄穴盘苗落入栽植器的过程中,番茄穴盘苗的质量损失是苗钵和苗茎与栽植器碰撞共同作用的结果。苗钵破碎性试验结果见表4,试验1和5条件下番茄穴盘苗的质量损失分别为9.67%和8.43%,小于其它参数组合的试验结果,说明优化得到的工作参数是最优值。
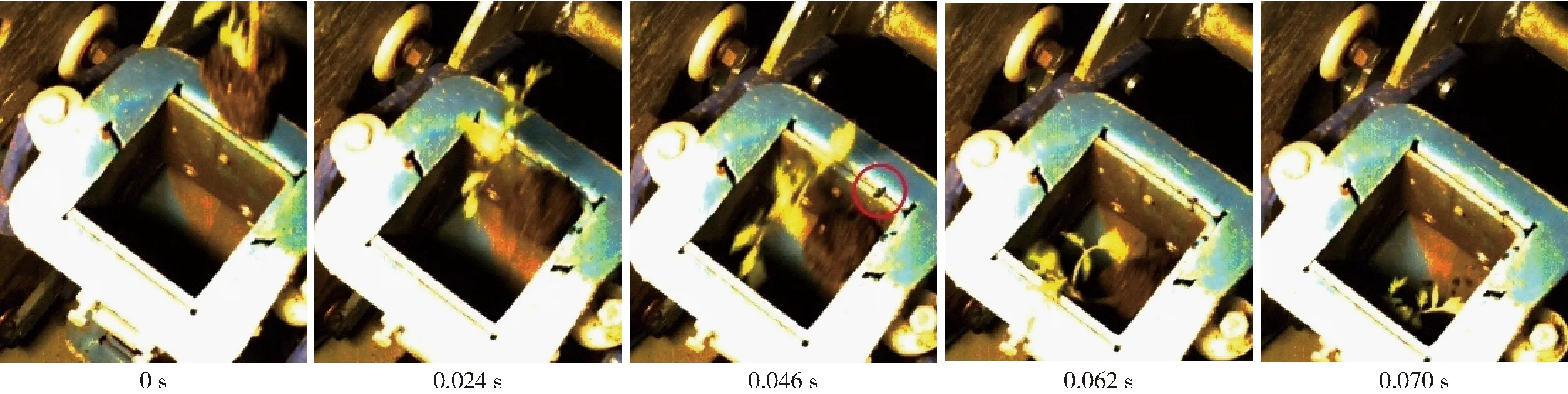
图15 苗钵与栽植器碰撞高速摄像图像Fig.15 High-speed camera images of collision between root lump and planting device
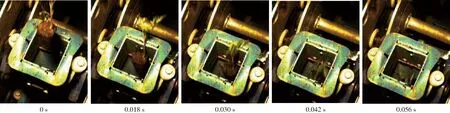
图16 苗茎与栽植器碰撞高速摄像图像Fig.16 High-speed camera images of collision between stem and planting device
6 结论
(1)建立苗钵最大接触力方程和番茄穴盘苗的碰撞运动方程,通过分析碰撞时苗钵与栽植器的最大接触力和番茄穴盘苗的运动速度得出,当栽植器角速度为1.18、1.31 rad/s时,为了减小碰撞时苗钵的质量损失,苗钵最大接触力对接苗角的要求与番茄穴盘苗角速度和苗钵运动速度对接苗角的要求相反。
(2)建立减小苗钵质量损失的多目标优化函数,得出当移栽频率在45~50株/min之间变化时,接苗角取72°为最优值。通过分析番茄穴盘苗碰撞位置和下落倾斜角与运动速度的关系,得出降低番茄穴盘苗的株高有利于减小苗钵质量损失,株高取12 cm为最优值。
(3)高速摄像试验表明,苗钵与栽植器的碰撞属于弹塑性碰撞,苗钵和苗茎与栽植器碰撞都会改变番茄穴盘苗的运动速度和姿态,并发生二次碰撞。苗钵破碎试验证明,优化得到的工作参数的番茄穴盘苗质量损失分别为9.67%和8.43%,优于其它参数组合试验结果。
1 于晓旭,赵匀,陈宝成,等. 移栽机械发展现状与展望[J/OL]. 农业机械学报,2014,45(8):44-53.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140808&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2014.08.008.
YU Xiaoxu,ZHAO Yun,CHEN Baocheng,et al. Current situation and prospect of transplaneter[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2014,45(8):44-53. (in Chinese)
2 刘洋,李亚雄,李斌,等. 新疆地区作物移栽与移栽机研究现状[J]. 广东农业科学,2013,40(9):189-191.
LIU Yang,LI Yaxiong,LI Bin,et al. Research of China’s Xinjiang region crop transplanting and transplanting machines[J]. Guangdong Agricultural Sciences,2013,40(9):189-191. (in Chinese)
3 韩绿化,毛罕平,胡建平,等. 穴盘苗自动移栽钵体力学特性试验[J].农业工程学报,2013,29(2):24-28.
HAN Lühua,MAO Hanping,HU Jianping,et al. Experiment on mechanical property of seedling pot for automatic transplanter[J]. Transactions of the CSAE,2013,29(2):24-28. (in Chinese)
4 孙裕晶,马成林,左春柽. 组合振动式导苗机构试验研究[J].农业机械学报,2001,32(6):30-33.
SUN Yujing,MA Chenglin,ZUO Chuncheng. Experimental investigation on combined guiding device with vibration[J]. Transactions of the Chinese Society for Agricultural Machinery,2001,32(6):30-33. (in Chinese)
5 宋建农,王苹,王清旭. 导管式水稻分秧栽植机构的秧苗运动分析及参数优化[J]. 中国农业大学学报,2004,9(1):71-74.
SONG Jiannong,WANG Ping,WANG Qingxu. Movement analysis of seedlings and parameter optimization of the set of distributing and transplanting seedlings with channel pipe[J].Journal of China Agricultural University,2004,9(1):71-74. (in Chinese)
6 张国凤,赵匀,陈建能. 水稻钵苗在空中和导苗管上的运动特性分析[J]. 浙江大学学报:工学版,2009,43(3):529-534.
ZHANG Guofeng,ZHAO Yun,CHEN Jianneng. Characteristic analysis of rice plotted-seedlingps motion in air and on turbination-type guide-canal[J]. Journal of Zhejiang University:Engineering Science,2009,43(3):529-534. (in Chinese)
7 王英,陈建能,吴加伟,等. 用于机械化栽植的西兰花钵苗力学特性试验[J].农业工程学报,2014,30(24):1-10.
WANG Ying,CHEN Jianneng,WU Jiawei,et al. Mechanics property experiment of broccoli seedling oriented tomechanized planting[J]. Transactions of the CSAE,2014,30(24):1-10. (in Chinese)
8 陈建能,夏旭东,王英,等.钵苗在鸭嘴式栽植机构中的运动微分方程及应用试验[J].农业工程学报,2015,31(3):31-39.
CHEN Jianneng,XIA Xudong,WANG Ying,et al. Motion differential equations of seedling in duckbilled planting nozzle and its application experiment[J]. Transactions of the CSAE,2015,31(3):31-39. (in Chinese)
9 陈建能,王英,黄前泽,等.钵苗移栽机变形椭圆齿轮行星系植苗机构优化与试验[J/OL].农业机械学报,2013,44(10):52-56.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20131009&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2013.10.009.
CHEN Jianneng,WANG Ying,HUANG Qianze,et al. Optimization and test of transplanting mechanism with planetary deformed elliptic gears for potted-seedling transplanter[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(10):52-56. (in Chinese)
10 VALENTIN L P. Contact mechanics and fricionphysical principles and applicatin[M]. New York:Springner Verlag Berliin Heidelberg,2010.
11 刘姣娣,曹卫彬,田东洋,等. 基于苗钵力学特性的自动移栽机执行机构参数优化试验[J]. 农业工程学报,2016,32(16):32-39.
LIU Jiaodi,CAO Weibin,TIAN Dongyang,et al. Optimization experiment of transplanting actuator parameters based on mechanical property of seedling pot[J]. Transactions of the CSAE,2016,32(16):32-39. (in Chinese)
12 东南大学,浙江大学,湖南大学,等.土力学[M].北京:中国建筑工业出版社,2010.
13 哈尔滨工业大学理论力学教研室.理论力学(Ⅱ)[M].北京:高等教育出版社,2003.
14 韩绿化. 蔬菜穴盘苗钵体力学分析与移栽[D]. 镇江:江苏大学,2014.
HAN Lühua. Mechanical analysis of the root lumps and development of a robotic transplanter for vegetable plug sedlings[D]. Zhenjiang:Jiangsu University,2014. (in Chinese)
15 FRANCIS Kumi. Study on substrate-root multiple properties of tomato seedlings and damage of transplanting pick-up[D]. Zhenjiang:Jiangsu University,2016.
16 CHOI W C,KIM D C,RYUI K,et al. Development of a seedling pick-up device for vegetable transplanters[J].Transactions of the ASAE,2002,45(1):13-19.
17 MAO H,HAN L,HU J,et al.Development of a pincette-type pick-up device for automatic transplanting of greenhouse seedling[J].Applied Engineering in Agriculture,2014,30(4):547-556.
18 陈立周.机械优化设计方法[M].北京:冶金工业出版社,2003.
19 KUMI F,MAO H,LI Q,et al. Assessment of tomato seedling substrate-root quality using x-ray computed tomography and scanning electron microscopy[J]. Applied Engineering in Agriculture,2016,32(3):1-11.
20 刘洋,李亚雄,李斌,等.膜上移栽机关键部件的设计与试验研究[J].干旱地区农业研究,2013,31(1):231-235.
LIU Yang,LI Yaxiong,LI Bin,et al. Design and testing of key components in above-film transplanter[J]. Agricultural Research in the Arid Areas,2013,31(1):231-235. (in Chinese)
21 韩绿化,毛罕平,严蕾,等. 穴盘育苗移栽机两指四针钳夹式取苗末端执行器[J/OL]. 农业机械学报,2015,46(7):23-30.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150704&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.07.004.
HAN Lühua,MAO Hanping,YAN Lei,et al.Pincette-type end-effector using two fingers and four pins for picking up seedlings[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(7):23-30. (in Chinese)