U-RT和UJI两种图书馆机器人系统运行方式对比研究
2018-05-30庄新辉
庄新辉
(武夷学院 图书馆, 福建 武夷山 354300)
21世纪我们迎来了科学技术突飞猛进日新月异的新时代。近30年来,被称为21世纪3大尖端技术(基因工程、纳米科学、人工智能)之一的人工智能技术快速发展,使得机器人开始能够胜任通常需要人类思考才能完成的复杂工作,如1997年5月,IBM公司研制的深蓝(DeepBlue)下棋计算机战胜国际象棋大师卡斯帕洛夫 (Kasparov)。借助人工智能技术 的发展,智能机器人开始出现并进入应用[1]。2016年3月谷歌围棋人工智能AlphaGo(被中国棋迷戏称为“阿尔法狗”)与韩国棋手李世石的最后一轮较量以前者获胜结束,最终这场轰动全球的“人机大战”的总比分定格在4∶1[2]。当今世界,机器人技术的应用已经涵盖了工业制造、物流运输、国防、家政和医疗等领域。在信息化浪潮中,图书馆虽然也进入了现代化计算机时代,但更多的应用是在信息流上的智能化,图书馆缺少以机械化为基础的自动化,图书的上下架、搬运、贴条码、分类和查重等操作多数图书馆仍然依靠人工来完成[3]。据统计,一个图书管理员在每天收回图书的过程中,平均手腕和手臂要有32 000次动作,这样的负担和重复性劳动容易给图书管理人员造成严重的职业病,其对图书管理员的手指、腕关节、手肘、胳膊和项背等部位造成了严重的伤害[4]。重复性的机械性劳动不仅仅是对身体能造成伤害,对人的精神层面也是一种伤害。欧美发达国家对能代替人体力劳动的图书馆机器人的研究应用较多,早在1994年5月瑞典恩金尔兹维克市公立图书馆安装了世界上第一个类人式机器人上下架图书的处理系统[4]。本文主要阐述URT和UJI两种图书馆机器人系统。这两种机器人系统工作原理有各自的特点,根据其设计原理,能自主处理图书,替代图书管理员的工作,在没有人干预下可以自主的检索书籍,操作图书上下架,也被称为图书管理员机器人。
1 U-RT机器人(the ubiquitous robot technology space)系统
U-RT机器人是日本筑波大学智能系统研究所Bong Keun Kim,Kenichi Ohara等人研制的图书馆机器人系统。
U-RT机器人系统具有无处不在的机器人视觉和环境智能能力,可以共享信息、知识,访问分布在全世界的服务器和数据存储设备;在日常的目标物体中通过埋设微处理器、执行器和传感器,使这些目标体具有智能化。建立了基于RFID技术的泛在空间,实现了环境智能化。U-RT是ubiquitous robot technology三个英文单词的缩写,ubiquitous这个单词谷歌翻译为“普及 ”,百度翻译为“无所不在的;普遍存在的 ”;美国的科学家早在80年代就开始试验推广“Ubiquitous”,当时还只有少数电脑专家知道这一研究计划。和互联网随时链接的Ubiquitous网络资讯社会是一个即使不意识到电脑的存在,也可在任何地方都可以随时交换情报的社会[5]。也可以理解为现在比较流行的说法“泛在空间”。“泛在空间(Ubiquitous)”是随时,随地,任何人都可以自由地使用信息的场所。在这个场所中,不用刻意地操作便可使用各种各样的信息,人和人、人和信息可以自由交流[6]。
U-RT机器人系统由图书管理员机器人系统、智能书架系统和智能地板系统组成。通过多系统的整合实现图书馆的泛在空间功能。
1.1 U-RT机器人自身的组成
U-RT机器人自身是一台装备有托盘的移动平台,在移动平台上有7自由度的机械臂和抓手,在机械臂的握手上装备有手眼系统(手眼摄像机和激光测距仪)、力扭矩传感器、RFID标签定位传感器和RFID标签阅读器。这个抓手是由日本筑波大学智能系统研究所开发的,在抓取机器人身上的托盘中的书籍时,在这个操作过程中首先由RFID标签阅读器从数据库中读取信息来确定所要抓取的书籍的大致范围,握手上的RFID标签阅读器读取书籍上的RFID标签信息后,从知识数据库中检索目标书籍的物理信息(书籍的长、宽、高、重量等数据)。依靠这些信息的反馈来决定机器人抓手张开的位置和抓手使用的力度。第二步由手眼系统通过图像处理确定目标书籍的精确位置,书籍的精确定位是由抓手上的手眼视觉和激光传感器来完成,机器人通过手眼视觉获取托盘中的书籍的图像后,通过简单的图像处理找到目标书籍的位置,由抓手上的力传感器来调整抓手的力度,抓取目标书籍。最后由力扭矩传感器来实现精确的抓取过程。
1.2 智能书架
泛在空间的建立离不开射频识别技术(RFID)。它是物联网中让物品“开口说话”的关键技术,在物联网中,RFID标签存储着规范而具有互用性的信息,通过无线数据通信网把它们自动采集到中央信息系统,实现物品的识别。[7-9]RFID标签是最合适的信息传递者,它可以存储和传递物体特殊的信息,通过无线频率RFID标签能传递身份和信息,这个特性可以使机器人感知空间和位置,也可以访问目标的信息。每个RFID标签都有自己的局域网地址,这可以让机器人通过网络访问目标信息。通过在目标中植入RFID标签可以实现环境智能。
U-RT机器人系统对RFID技术的应用开发有以下几个方面:开发的智能书架运用了RFID技术,智能书架的每个隔断都安装有RFID标签阅读器,通过阅读书籍RFID标签信息可以知道书架中所有书籍的大致位置,识别书籍的分类,书籍位置的变化,对照知识数据库中的相关信息,进而修改数据库中书籍的状态信息。书籍的标签信息也被用来作为物理链接访问存储在集中式或分布式服务器中的所有有关信息。这个智能书架具有互联网服务的功能,可以提供智能书架的当前状态,在终端的电脑上显示给读者,并且可以发送电子邮件给终端使用者。它还是一个开放的系统,可以被基于RT-Middleware(机器人技术中间件)语言编写的程序操作使用。
1.3 智能地板
在此研究中,智能地板是根据所在环境地面尺寸设计的。在地面设立直角坐标系,分别在X轴和Y轴方向埋设400片RFID标签,标签间隔为25 cm,这些坐标点被存储在虚拟空间,这样机器人就可以通过自身的数据库和智能地板相互交流信息,利用这些坐标点组成的地图来搜索定位。
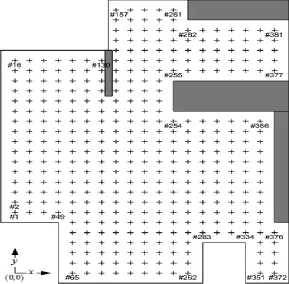
图1 U-RT空间地图Figure 1 Map of the u-RTspace
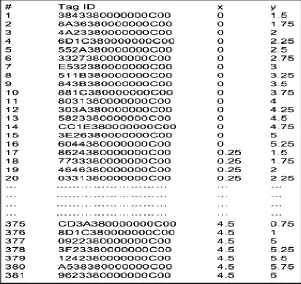
图2 地板标签信息库Figure 2 Floor tag information DB
1.4 StarLITE系统
这个系统被用来为机器人定位,其组成为机器人手眼系统CCD板摄像机(组成:广角摄像头、DSP图像处理单元、IR通信单元)和安装在天花板上的红外线信标构成。通过这两个系统建立的信息空间解决了机器人许多难题,如机器人本身的定位、路径规划和导航。通过RFID标签连接现实和虚拟空间,机器人能感知环境目标,锁定它们的位置[10]。
U-RT机器人系统通过机器人、智能地板、智能书架和用RT中间件编写的操作程序实现了泛在空间功能,能稳定可靠的实现图书的上下架操作。具有网络互联功能,通过网络发布图书的状态信息给读者,实现了即时反映图书馆中图书的状态。
2 UJI机器人系统
UJI是Universitat Jaume I(西班牙海梅一世大学)的缩写,UJI机器人是西班牙 Mario Prats·Ester Martínez· Pedro J.Sanz·Angel P.del Pobil等人开发的一款图书馆机器人系统。
UJI机器人的基础是型号Nomad XR4000机器人,它装备有无线电以太网,两个带24个声纳和24个红外线的环传感器,保险杠和SICK激光测距仪。这个机器人安装了有七个自由度的轻量级三菱PA-10机械手。机械手安装有手眼结构的双摄像头的立体摄像机,六自由度的力传感器安装在平行夹手和末端执行器链接的腕部。还有一些红外线距离传感器贴在机械臂上。
通过整合应用不同的技术(例如立体视觉、视觉跟踪、概率匹配、行动估计、多传感器抓取、视觉伺服和混合控制等技术)这款机器人能在没人类干预下,仅仅通过提供的贴在书脊上的编码、图书馆地图和关于它的一些逻辑知识等信息,利用时空限制和环境的规律性,在一个普通的图书馆自主定位书籍,利用手眼视觉和力传感器从书架上抓取它并带给使用者。
其工作流程由用户界面、书籍定位、视觉模块和书籍检索等模块的相互配合来完成。
2.1 用户界面
这个系统首先有个基于互联网的用户界面,用户通过这个界面传递想要寻找的书的编码信息给机器人。界面的另一个用途是监视机器人的活动和对模糊书签的人工识别。
2.2 书籍定位
书籍的定位是利用图书馆特征物来确定目标书架的位置,利用算法来辅助搜索在书架中的书籍;通过使用图书馆地图控制移动机器人到达指定的位置。具体的定位行动是定义书架同质结构 (书架的行和列),定义合理的图书馆存储模型数据结构,实物结构被映射到逻辑结构中,逻辑结构设置参数有:建筑物的数量;每个建筑中层数的数量;每层中书箱的数量,相关的位置和结构(列数、行数和尺寸)。每个书架中第一列最左上端的第一本书的编码被存储用来做逻辑书架特征物。当机器人接收到要找的书籍编码信息后,机器人会把目标书籍编码与这些逻辑书架的特征物对比,找到目标书架信息。逻辑书架位置信息在图书馆地图中,机器人在图书馆地图中锁定放置目标书的书架。书架的位置锁定后利用图书馆地图来规划路径,指导移动平台到达目标处。机器人导航的实现用到Player/Stage软件,声呐、红外和激光测距传感器来规避障碍。进一步提高导航的能力要用到基于贝叶斯方法的概率定位和占用网格映射等方法。利用图书馆特征物能找到目标书架,但是目标书籍的精确定位要用到视觉指导和智能搜索算法。

图3 智能搜索书籍算法流程图Figure 3 Flow chart of finding a book
2.3 视觉模块
在书架中找到一本目标书籍的算法要用到视觉来定位、读取和对比书签。从图像中读取书签要用到图像分割、书签跟踪和光学字符识别(OCR)等技术方法。视觉模块不仅能从单个的图像中提取书码,而且也能从一系列的图像中提取书籍码。
图像的拍摄要用到平面估计的技术,UIJ机器人移动到目标书架前要保证有个好的拍摄视角拍摄书脊图像,这样图像的处理才能更准确容易,当机器人位置不是理想的拍摄位置时,通过视觉计算调整摄像机对准书脊平面。计算的方法是利用针孔摄像机模型和极线几何来联系在3D结构投影的2D图像信息。这个摄像机有两个摄像头在一个平面上,拍摄时有两个角度图像,通过对比找到相应点,通过最小标准方差法计算出平面。调整两者处于最佳的位置。
在拍摄的图像中锁定书签使用自动阈值分割算法。在拍摄的图像中分割图像,求出分割图像的平均亮度,以此亮度值为中心建立二进制图像,结果生成标签的二进制图像。
光学字符识别(OCR)用来提取图像中的文字。书签是用白纸黑字构成,通过分析亮度值,函数的最大值代表背景,函数最小值就代表了文字。通过这个方法锁定书签中的文字。
2.4 书籍拾取
目标书籍被找到后,视觉抓取系统用来提取书籍,它是用一个专门的平行状的抓手和摄像头组成。抓手有两个特殊的指尖,指尖是很薄,适合插入书籍见的缝隙中,为减少难度,左边的指尖比右边的长,左边的指尖先插入书籍间的缝隙,右边的指尖后插入。具体过程是:用力/视觉控制法到达目标书籍抓取位置。找到书籍的左边插入左手指尖,直到右边的指尖触碰到这本书。寻找书籍的右边插入右边的手指,这时候左端的手指保持在原位。这里用到了基于力和视觉伺服的联合混合控制法,这控制法有两个自由度,在平行方向利用书籍的边缘做为视觉特征用基于图像的视觉伺服。在垂直方向用力回馈传感器,触碰到书本后力感应开关打开。当接触时,所有的抓取过程都是通过力反馈来引导。首先,机器人试图找到在书左边的缝隙,并插入较长的左指甲进去。力控制法使机器人向前施力,同时控制左侧的运动。当左手指位于书脊上,机器人检测到它不能向前移动时,它会向左移动,结合这个正面和横向运动,我们使机器人遵循这本书表面向左。当找到书左边缘时,机器人没有感觉到任何力量,力量控制法则使其向前移动。在此步骤中,机器人不会移动,因为前面没有障碍。为了插入左指尖,机器人总是试图向前移动,当它不能完成时,它移动往左边。按照这个策略,机器人很容易找到左边的缝隙,当机器人检测到其左指尖时相对于初始位置前进2厘米,它理解为第一个指尖已经是插入状态。为了插入右边的指尖,机器人仍然尝试向前移动手指。如果找不到正确的分隔,它会感觉到书脊回馈的阻力,但是这次,不是向右移动,而是张开握爪,当发现书籍右侧的缝隙时,手指可以自由前进,从而停止打开。再次,当机器人检测到夹具手指前进时相对于首次接触的初始位置为4厘米时,其认为两只手指都成功插入,提取动作和抓取任务完成[11]。UJI机器人系统通过整合多种跨学科技术和运用多种智能算法实现了图书上下架功能。
3 U-RT和UJI两种图书馆机器人系统对比分析
U-RT机器系统由机器人、智能书架、智能地板、环境定位传感器和中间件组成。是由机器人和环境组成的系统,通过广泛利用RFID技术,在周围环境中埋设RFID标签、传感器和微处理器实现了环境智能。执行任务时通过机器人和环境的互动交流来完成,机器人本身的结构相对来说比较简单,更多的是依赖所处的智能环境,其发展的技术方向和物联网、智慧城市等发展方向一致。对现代化、智慧型新图书馆舍的建设有借鉴。
UJI机器人系统整合了多种学科的技术,这些技术包括在线图像分割、立体视觉、视觉跟踪、概率匹配、行动估计、概率选择、多传感器抵达和抓取、视觉伺服和混合控制等。运用多种算法,UJI机器人系统仅通过外界提供的书籍编码、图书馆地图和一部分图书馆逻辑结构知识就能完成它的工作。UJI机器人系统在执行其任务时,对外部的条件依赖很少,通过自身的能力来完成任务,能在普通的图书馆中应用,不需要建造特殊的环境,适应能力强。虽然UJI机器人系统复杂,但其行为更具有类人的特征,对环境依赖少,应用范围广。随着相关技术的发展成熟,成本会不断下降,其发展更具有潜力。图书馆的环境是半结构化环境,环境有些是固定的,也有每天变动的随机人、物,机器人导航、检索、寻架、摆书、取书等行为操作都是比较精细复杂的,这和人类所处的日常生活情景相近,如果UJI机器人系统技术在图书馆中发展应用成熟,在其他领域也会成为人类好帮手。
4 结语
U-RT和UJI两种自主图书馆机器人系统的运行方式代表了技术发展的两个方向,一个是自身和环境组成系统,在建设机器人本身的同时,更注重对周围环境的开发建设;另一个更注重自身的能力开发,对环境的依赖程度较低。在当今,机器人技术代表了科技发展的前沿,其在军事、医学、工业制造等多个领域都有广泛的应用。相对其他行业,在图书馆的应用较少,特别是机械性的、能替代人类体力劳作的机器人研究应用更少。图书馆是技术、知识和信息的记录和传播者,也是文明发展的坚实基础。在现今的信息社会,图书馆事业受到了现代技术的冲击。图书馆的发展,很重要的一面是跟随当前的前沿科学技术,这不仅是体现在知识文献的存储方面,现代化场馆,自动化管理,图书馆机器人系统等开发应用亦是很重要的方面。
[1]夜风.全球智能机器人应用领域分析[EB/OL].[2013-08-29].http://www.wjzs.org/news/html/20130829_14657.html.
[2]从“深蓝”到“阿尔法狗”:人机大战 20年进化史[EB/OL].[2016-3-29].http://www.sohu.com/a/66573129_371013.
[3]刘琼.图书馆机器人系统研究[C].杭州:第五届全球智能控制与自动化大会,2004:4891-4893.
[4]HANSSON R.Robot lends a hand in a Swedish library[J].Industrial Robot,1995,22(5):34-35.
[5]百度百科.Ubiquitous,社会 [EB/OL].[2017-7-30].https://baike.baidu.com/item/Ubiquitous%E7%A4%BE%E4%BC%9A/834162?fr=aladdin.
[6]马满仓,徐启建.泛在网络技术及其应用[J].无线电工程,2010,40(11):7-9.
[7]AKYILDIZ L F.Wireless sensor networks:a survey[J].Computer Networks,2002,38(8):393-422.
[8]STANKOVIC J A.Real.Time communication and coordination in embedded sensor networks[J].Proceedings of the IEEE,2003,91(7):1002-1022.
[9]陈积明,林瑞仲,孙优贤.无线传感器网络的信息处理研究[J].仪器仪表学报,2006,27(9):1107-1111.
[10]BONG K K,KENICHI O,KOSEI K,et al.Design of Ubiquitous Space for the Robotic Library System and Its Application[C].Proceedings of the 17th World Congress:the International Federation of Automatic Control,Seoul,July 6-11,2008.
[11]MARIO P,ESTER M,PEDRO JS,et al.The UJI librarian robot[J].Intel Serv Robotics 2008(1):321–335.
