基于经纬度的航迹数据改进抗野值Kalman滤波∗
2018-05-29鱼佳欣冯建锋李文君
鱼佳欣 冯建锋 李文君 郭 然
(中国洛阳电子装备试验中心 济源 459000)
1 引言
在靶场试验过程中,使用雷达、GPS等对被试目标进行跟踪测量,但在测量过程中,由于电磁干扰、遮挡(如建筑、林荫)以及载体机动等异常情况,测量序列中常常会出现严重偏离目标真值的数据,称为“野值”。即使是高质量的原始采样数据,也会含有1%~5%甚至多达10%~20%的异常数据[1]。野值分为单点野值与连续野值,其特点一般是幅值大、持续时间短、无规律。如果不予以分离和滤除这些野值,指挥员无法准确判断目标位置,影响试验的顺利开展,具有一定的危险性,而且给后期的数据处理带来误差[2]。
由于航迹测量数据解算属于实时目标跟踪测量,被测量对象在测量过程中不断变化,且每一观测点只进行一次观测。因此,静态重复测量的检验准则不适于测量数据的合理性检验,所以应选择实时抗野值修正方法。
目前,在实时目标跟踪中辨识与剔除测量数据野值方面,已提出许多算法。本文研究了三种方法:简单经纬度法、最小二乘法和抗野值Kalman滤波方法,并对后者进行改进,试验结果表明了各算法的优势和劣势。
2 实时抗野值的修正方法
2.1 简单经纬度法
简单经纬度法思路为:应用式(1)、(2)比较实时测量的相邻数据点的经纬度值,式中JDFilter和WDFilter为过滤阈值,其大小由测量设备的性能决定。若满足条件则认为第n+1的值是真值,否则认为是野值丢弃。其算法原理图如图1:

图1 简单经纬度法和改进简单经纬度法原理图

简单经纬度法有个缺陷,当收到第一个测量值是野值,那给后来的数据判断提供了错误导向,导致正确的真值也被认为是野值滤掉。为此,本文在简单经纬度法基础上提出改进措施:如图1中的红色椭圆中标注,即增加了对第一个测量值的判断,如果不满足式(1)~(2),则将第n和第n+1的值均删除,直至满足条件。这样在一定程度上确保了收到的第一个值为真值,为后期的判断提供了较准确的基础。
改进后的简单经纬度法仍有个缺陷,当野值大量间隔出现时,会滤掉较多真值,短时间内无法得知目标实时位置。
2.2 最小二乘法
要克服野值间隔出现,则需利用收到的多个值进行过滤。最小二乘法的思路是:利用最后收到的4个点迹数据Un-1、Un-2、Un-3和Un-4以最小二乘法外推获得下一点迹数据。采用式(3)~(4)进行野值判定,假定测量数据的误差服从正态分布。

当获得的测量点数据Un满足:

计观测值估计误差为εn通常被称为新息,新息的统计特性与观测值的统计特性是一致的,根据上式可知其方差为

因此,对观测值Zn中是否有野值进行如下假设判断[5~7]:
εn满足可认为观测值中没有野值;
εn满足,可认为观测值含有野值; (6)
式(6)中,r是(M×1)维的向量(M为观测值的维数),其意义是表明工程上所能接受的极限误差,一般取4~6[8]。该判别方法的特点是简单易行,且物理意义明确,根据工程中的要求和环境的变化还可以随时调整r的分量。更为重要的是,通过该方法可清楚地判明观测值中的哪些分量超出了极限误差,从而可以有针对性地改进事先假定的目标运动状态模型、噪声统计特性等,达到提高滤波精度的目的。当新息εn超过给定的门限值时,观测值为野值,认为Zn不合理,此时调整增益Kgn,如式(7):

其中,m∈[0,1],类似于权系数。这样状态滤波方程式(6)将得到修正,既消除了野值点会使滤波发散的不利影响,又合理利用了野值中的有用信息。如果信息εn小于给定的门限值,则对增益Kgn不做改变[9~10]。
抗野值Kalman滤波可以克服初值是野值、间隔野值与连续野值的情况,但仍有个缺陷,当初值
D的选取准则根据测量设备的误差分布规律,参见[3~4]。
最小二乘法相比改进经纬度法,可以克服收到的第一个值是野值和野值间隔出现的情况,但仍有个缺陷,当野值连续出现3个以上时,算法会失效,无法滤掉野值。
2.3 抗野值Kalman滤波方法
是野值,则需经过多次递归调用才能收敛,实时跟踪到目标,且初值与真值差距越大,递归时间越长,不利于实时跟踪。
2.4 改进抗野值Kalman滤波
为了尽快跟踪,本文提出改进抗野值Kalman滤波,从两个方面进行改进。
第一,利用改进简单经纬度法确定第一个真值,然后调用抗野值Kalman滤波方法。
第二,式(7)的卡尔曼增益调整存在缺陷,若系统状态空间有多个变量,通过式(6)虽可清楚地判明观测值中的哪些分量超出了极限误差,但式(7)却对所有变量进行了修正,导致正确的值矫枉过正,降低滤波精度。因此,本文只对不合理值进行修正。
改进抗野值Kalman滤波可以克服连续野值,但参数设置较繁琐,不同的设备需要根据性能进行不断调整,以达到最优滤波效果。
3 实验结果和分析
经试验,雷神二次雷达测量序列中的野值较多,选应答码为6206的飞行数据检测分析;
如图2为原始数据在Matlab中的点图,飞行表现为:飞行器本应在“1”的航迹上,却不时跳到“2”的航迹,且并不是连续出现。

图2 原始数据Matlab点图
根据该设备测量性能,设置改进简单经纬度法滤波阈值为:DFilter=WDFilter=0.06。结果如图3,由于收到的第一个值不是野值,且野值不是间隔出现的,算法成功地滤掉了野值。
据设备的误差分布规律,在最小二乘法中设置D=0.6,结果如图4,没有连续3个以上的野值,所以算法成功地滤掉野值,且用推算出的真值代替野值,所以图4中的点比图3更加密集。
应用抗野值卡尔曼滤波方法,即初值不是测量真值,为野值。据某二次雷达测量性能,设置Q=[0.006;0.006],R=[0.002;0.002],r=4,W(1)=[0.011;0.001],x(:,1)=[109.99 32.95],A=[1 0;0 1],m=0.002,p(:,1)=[0.01;0.01]。结果如图5,成功滤除野值,但需要循环递推几个点后方能找到真实航迹点,且初始值与真值差距越大,递推点数越多,收敛时间越长。该算法也利用推算出的真值代替野值。

图3 改进简单经纬度法Matlab点图

图4 最小二乘法滤波Matlab点图

图5 初始值非测量真值的抗野值Kalman滤波Matlab图
应用改进抗野值卡尔曼滤波方法,设置JDFilter=WDFilter=0.06,x(:,1)为改进简单经纬度找到的真值:x(:,1)=[110.712;33.917],其余参数同上,结果如图6,不仅成功滤除野值,且能够快速跟踪到目标,提高了实时跟踪效率,为指挥员实时掌握飞行目标状态。
应用最小二乘法,人为加入3个连续野值后如图7,算法会失效,无法滤除野值;应用改进抗野值卡尔曼滤波方法,人为加入6个连续野值后,结果如图8,该算法可以克服最小二乘法的不足。

图6 改进改进抗野值kalman滤波matlab点图

图7 最小二乘滤波加入连续野值图
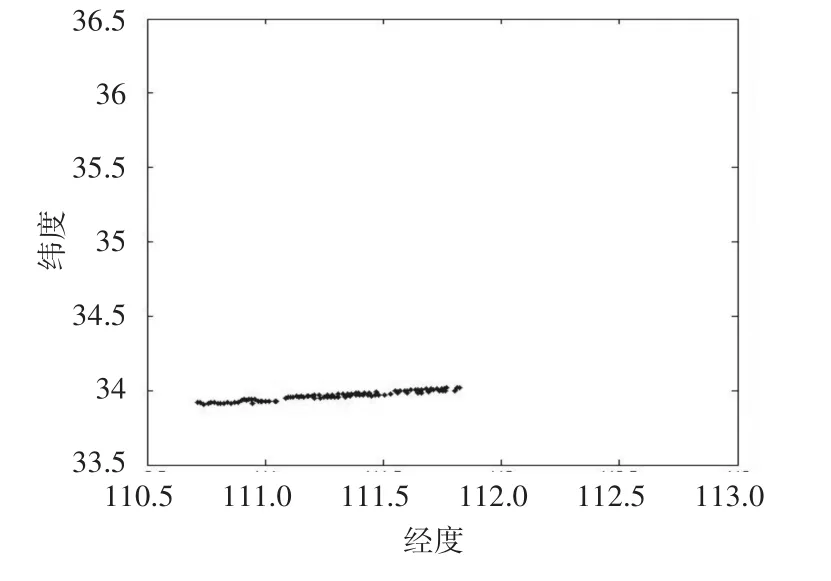
图8 改进抗野值Kalman滤波加入连续野值图
由上可知,各算法对不同野值的滤除效果不同,各有优缺点。改进简单经纬度法虽较大程度地保证第一个点为合法值,但遇到野点间隔出现的情况时,该算法会将合法值也滤除;最小二乘法可以较大程度克服改进简单经纬度法的弊端,但遇到连续3个以上野值也会将野值误认为合法值;抗野值Kalman滤波算法可以克服初值为野值与连续野值,但需要经过多次递归方能收敛,而改进抗野值Kalman滤波算法能够在连续野值出现时保持滤波的无偏性和稳定性,且能快速收敛跟踪,但该算法需根据不同设备设置不同的参数,较前几者计算较繁琐。
4 结语
在实际的工程测量中,观测值中出现野值的现象是经常发生的。针对雷达实时数据处理,本文总结、提出的野值判别与处理方法抗野值Kalman滤波不仅可以有效地识别野值,提高数据质量,消除野值对航迹显示的不利影响,可以应用在实时航迹数据处理等领域。
[1]胡绍林,孙国基.靶场外侧数据野值的统计诊断技术[J].宇航学报,1999,20(2):68-73.HU Shaolin,SUN Guoji.Range of the lateral statistical data outliers diagnostics[J].Journal of aerospace,1999,20(2):68-73.
[2]Jo-Anne T,Evangelos T,Stefan S.A Kalman filter for robust outlier detection[C]//Proceedings of the 2007 IEEE,2007,52:1514-1519 o-Anne T,Evangelos T,Stefan S.卡尔曼滤波器用于鲁棒异常检测[C]//Proceedings of the 2007 IEEE,2007,52:1514-1519.
[3]张世英,刘智敏.测量实践的数据处理[M].北京:科学出版社,1977.ZHANG Shiying,LIU Zhimin.Data processing of measurement practice[M].Beijing:Science Press,1977.
[4]贾浩正.抗野值的航迹数据Kalman滤波[J].测控技术,2014,33(9):26-28.JIA Haozheng.Outlier-proof track data Kalman filter[J].Measurement and Control Technology,2014,33(9):26-28.
[5]张怡,廉晶晶,黄文刚.抗野值性能的无迹卡尔曼滤波算法的研究[J].计算机工程与应用,2012(33):153-156.ZHANG Yi,LIAN Yi,HUANG Wengang.Research on the performance of the anti-wild value of karman filter[J].Computer engineering and applications,2012,4(33):153-156.
[6]张孝芳.基于M估计的抗野值卡尔曼滤波方法[J].信息与电子工程,2005,3(2):114-117.ZHANG Xiaofang.The anti-wild value kalman filtering method based on M estimation[J].Information and electronic engineering,2005,3(2):114-117.
[7]刘哲,王俊锋,武昱二,等.基于M估计的Kalman滤波野值方法[C]//第二十二届中国控制会议,2013,9(11):4652-4655.LIU Zhe,WANG Junfeng,WU Yu,et al.Based on M estimation of Kalman filter field value method[C]//China con-trol conference of the 22nd session of China,2013,9(11):4652-4655.
[8]吴建业,郑建辉,丁军辉.靶场测量中野值的判别与剔除方法研究[J].战术导弹技术,2011(2):98-100.WU Jiye,ZHENG Jianhui,DING Junhui.The detection and elimination of field values in the range of the target field[J].Tactical missile technology,2011(2):98-100.
[9]祝转民,秋宏兴,李济深.动态测量数据野值的辨识与剔除[J].系统工程与电子技术,2014,8(14):147-149.ZHU Zhuanmin,QIU Hongxing,LI Jishen.The identification and elimination of dynamic measurement data field values[J].Systems engineering and electronics,2014,5(14):37-40.
[10]金学军.基于最小二乘拟合的外弹道测量数据野值剔除方法[J].四川兵工学报,2015,32(1):22-26.JIN Xuejun.Based on the least squares fit,the field values of the field were eliminated[J].Journal of military engineering in sichuan,2010,32(1):26-26.
