全自动运行地铁车辆基地工艺设计研究
2018-05-28张明
张 明
(中铁第四勘察设计院集团有限公司,湖北武汉 430063)
0 引言
全自动运行系统(Fully Automatic Operation)是基于现代计算机、通信、控制和系统集成技术,实现地铁列车全过程自动化运行的新一代城市轨道交通系统,具有技术先进、运行安全、高效可靠等特点。车辆基地是城市轨道交通系统重要的组成部分,主要承担车辆的运用管理和检修停放等任务,是车辆的后勤保障基地。在人工驾驶模式下,车辆基地的收发车需要根据运营计划,由行车调度统一进行安排,调度和驾驶皆由人工完成,导致收发车效率较低,国内人工驾驶车辆基地的最小收发车间隔通常在 4~7 min/列。随着全自动运行技术的快速发展,新建全自动运行线路正线最小行车间隔一般在2~3 min/列,人工驾驶模式车辆基地的收发车能力已难以满足全自动运行线路的行车需求,因而实现全自动运行车辆基地是十分必要的。
由于全自动运行车辆基地既要具备车辆停放功能,又要具备检修功能,为了使检修作业不影响车辆的安全运行,全自动运行车辆基地需要按功能进行分区设计,并应采取有效措施确保分区之间作业方式的有效转换、分区内部作业人员的安全等。
1 功能分区
1.1 有人区与无人区
根据 GB50157-2013《地铁设计规范》中的要求,车辆基地内车辆检修及维护保养工作主要包括洗车、停车列检、双周检/三月检、定/临修和厂/架修等。实现全自动运行后,对车辆基地功能布局提出了新的要求,在基地内车辆要能够实现自动休眠、唤醒、自检、收发车和洗车等功能。为提高作业效率,保障车辆运行安全和人员作业安全,需要将车辆基地划分为无人区和有人区。功能分区的划分要利于生产,方便运营和管理,避免有人和无人作业之间的相互干扰。通常将规律性和周期性作业、人员参与作业少或无人参与作业的区域划为无人区,将必须依靠专业检修人员和工装设备才能完成作业任务的区域划为有人区。
结合车辆基地的作业特点和上述划分原则,国内外的通常做法是将咽喉区、洗车库、停车列检库和试车线等划为无人区,将双周检/三月检库、定/临修库和厂/架修库以及其他生产办公用房等划为有人区。目前,由于国内生产的调机和工程车辆未能实现自动运行,因而通常将调机工程车库也设在有人区内,如已建成通车的北京燕房线阎村北停车场、上海 10 号线吴中路停车场以及在建的东莞 1 号线道滘车辆段、武汉 5 号线江村车辆段、南京 7 号线马家园车辆段等,而国外已经实现调机、工程车全自动运行的车辆段则将调机工程车库划在无人区。
1.2 停车列检库独立分区
车辆基地内无人区并非完全禁止人员进入,而是采取分时段许可进入。列检工作分为两类:一类是列车出库前的自检,包括通信设备、车门、广播、牵引系统、制动系统和车载 ATC 设备的功能性检查,由车辆自动完成;另一类是列车回库休眠后的日常检查和保洁,包含车体、车门、车钩、车内电气、车下电气、转向架、空气气路及制动单元、车顶电气等零部件的完整性检查,以及车厢内的清洁,该部分主要以人工作业为主。
为确保行车安全,通常将停车列检库划分成多个独立分区,以每线 2 列位库房为例,每个分区设 2~3 股道为宜。各独立分区之间需采用防护栅栏隔离,在每个独立分区库房尾端设置门禁及警报装置,并安装安全防护开关(Staff Protection Key Switch,SPKS),由车辆基地调度中心控制。SPKS 开关启用后,则该分区内车辆锁闭,门禁系统方可打开。图 1 为上海 10 号线门禁系统实物图。退出运营的列车按独立分区依次存放,当停满一个分区后,所有车辆进入锁闭状态。三轨供电车辆需要切断供电电源,工作人员获得授权后进入分区内作业,授权作业流程如图 2 所示。

图1 独立分区门禁系统实物图
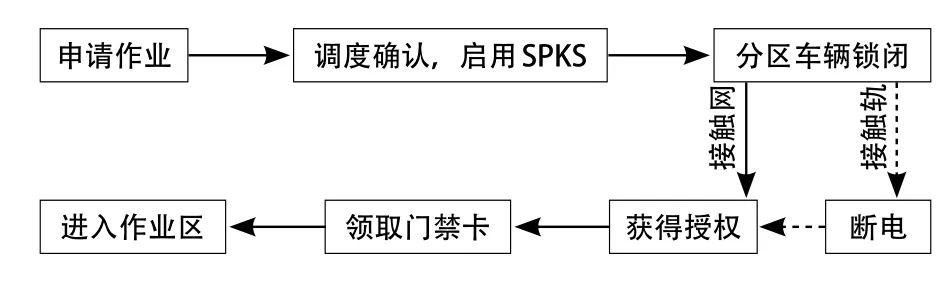
图2 分区授权作业流程图
2 停车列检库检修通道
常规地铁车辆基地停车列检库内入库端和尾部皆需设置地面人行通道,且1线多列位库在每 2 列位之间设置横向地面消防通道。采用全自动运行方案后,停车列检库内分成若干个独立分区,且各分区相互独立,中间用栅栏隔开,人员无法横向通过。若仅由库尾进入分区,则走行距离过大,影响作业效率。
为了便于获得授权的检修人员进入分区内,减小走行距离,提高作业效率,有效的做法是:除在库尾设置地面通道和门禁系统外,在库房中部或端部设置横向地下通道或人行天桥,并在各独立分区内设置出入口,安装门禁系统,如图 3 和图 4 所示。对于地下通道和人行天桥的选择,主要根据车辆的供电制式来确定,对于接触网供电的车辆,为减小停车列检库净空高度和避免发生触电危险,多采用地下通道,而接触轨供电车辆停车列检库多采用人行天桥。
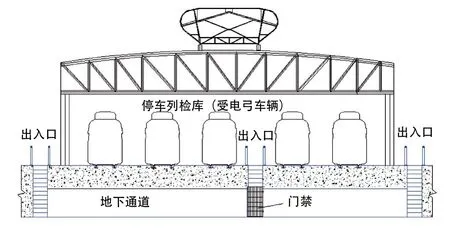
图3 地下通道(受电弓车辆)
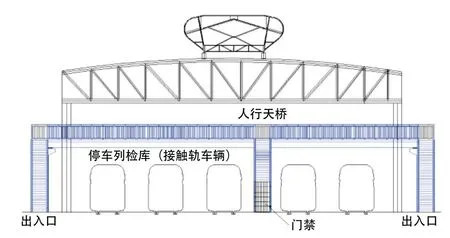
图4 人行天桥(接触轨车辆)
3 转换轨
转换轨是全自动运行车辆基地内用于列车驾驶模式转换和控制权交接的特定区段。检修后的列车由司机驾驶至转换轨,经过建立车地通信、定位后转换驾驶模式,自动驶入无人区或正线。需要检修的列车通过调度中心控制驶入转换轨,转换驾驶模式后,由司乘人员驾驶至检修库内进行检修作业。建立车地通信是指列车与地面设备建立双向通信,取得移动授权;定位是指列车确定自己在线路中的位置和运行方向。转换轨的设置有2 种方式(图 5、图 6)。
(1)集中设置方式。仅设 1 处,位于咽喉段有人区与无人区的交界处。该设置方式的优点是可直接利用既有牵出线兼做转换轨使用,咽喉区长度较短,减少用地和工程投资;缺点是转换效率低,会对调车作业产生一定的影响。国内已开通及多个在建全自动运行车辆基地基本都采用集中设置方式。
(2)分散设置方式。设置多处,位于有人区检修库的入库端。该设置方式的优点是转换效率高,调车作业之间无干扰;缺点是库前区轨道需要加长,且至少具有 1 辆车长度的直线段,占地和工程投资都高于集中设置方式。该设置方式在新加坡应用较多。
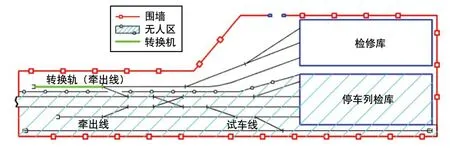
图5 转换轨集中设置
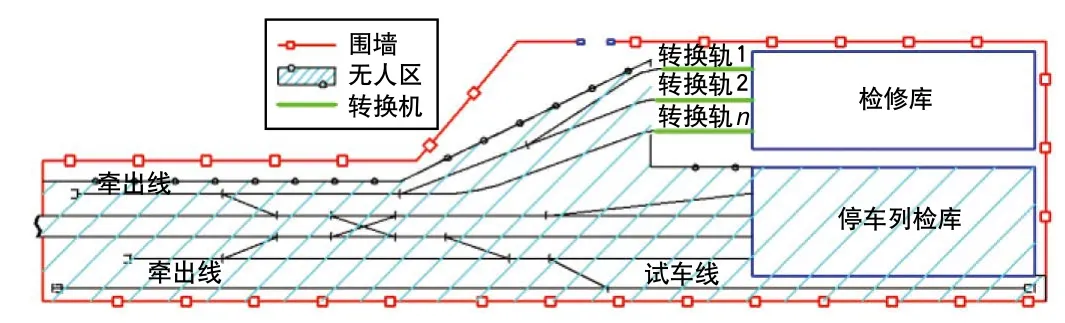
图6 转换轨分散设置
4 轨道及库房长度
车辆基地内部分轨道需增大安全防护距离,包括牵出线、洗车线、停车列检线等,具体要求如下。
(1)牵出线及洗车线根据信号系统要求,在非全自动运行长度基础上增加 15 m 安全防护距离。
(2)由于发车前车辆在停车列检库内唤醒后需要进行动态自检,以测试车辆的牵引、制动性能,对于一线多列位布置的停车列检库,各列位之间应满足至少20 m 的安全距离,末端列位距车档安全距离至少 15 m。此外,建议停车列检库内采用液压缓冲式车挡。
(3)洗车库、停车列检库根据第(1)、(2)条相应加长。
5 结束语
通过对全自动运行地铁特点的介绍以及对采用全自动运行车辆基地必要性的分析,从功能分区、检修通道和转换轨的设置以及对土建工程的影响等方面,对全自动运行地铁车辆基地工艺技术进行了研究,提出合理化建议。期望本研究所得出的结论和建议能为相关车辆基地工程的设计提供借鉴和参考。
[1]郭泽阔. 全自动驾驶车辆段总体布局方案设计[J]. 都市快轨交通,2017(2).
[2]任安萍. 浅谈我国全自动无人驾驶地铁的发展[J]. 科技视界,2012(25).
[3]徐彪. 浅析全自动无人驾驶对地铁车辆基地设计的影响[J]. 科技与创新,2015(5).
[4]周永,肖衍. 轨道交通全自动运行车辆基地功能需求探讨[J]. 铁路技术创新,2016(6).
[5]GB50157-2013 地铁设计规范[S]. 2014.
[6]张雄. 论地铁车辆段总平面设计的特点及其优化[J].铁道工程学报,1999(3).
[7]徐久勇. 地铁车辆段尽端式总平面布置研究[J]. 铁道工程学报,2014(6).
[8]高照学. 基于无人驾驶的地铁车辆段总图设计探讨[J]. 现代城市轨道交通,2017(4).
