辅助挖掘控制系统在液压挖掘机上的应用
2018-05-28李亚东孟凡建
李亚东,孟凡建
(徐州徐工挖掘机械有限公司,江苏 徐州 221004)
液压挖掘机是工程机械中最主要的工程设备,其移动灵活,挖掘及装载效率高,可搭载多种类型的机具,工程适应性强,已被广泛应用于水利工程、交通运输以及矿产开发等多种工程领域中。
液压挖掘机电子控制系统的自动化程度是衡量液压挖掘机控制技术的一个重要指标,如何提升挖掘机电子控制系统的自动化程度成为了重要研究发展方向之一。近年来随着电子控制技术的快速发展,各种新型传感器及电磁阀被引入到挖掘机的控制系统中。结合现代控制理论及全新的控制策略,挖掘机控制技术得到了突飞猛进的发展。
1 辅助挖掘系统发展现状
由于发达国家人工成本较高,辅助挖掘控制系统率先由欧美等发达国家开发并得到广泛应用,目前市面上具有代表性的辅助挖掘控制系统供应商主要有美国Trimble、德国MOBA、瑞士Leica、日本Topcon等,他们均可以为客户提供整套系统解决方案。辅助挖掘控制系统的引入可以大大提升施工效率,并且施工工程质量可以得到有效保证。由于该系统在多种施工领域中所表现出的优越性,受到了越来越多的液压挖掘机用户的欢迎。随着中国经济近年来的快速发展,基础设施建设和矿产开发等工程量也越来越大,人工成本逐年攀升,对于辅助挖掘控制系统的需求也逐渐迫切。目前国内施工领域也在开启辅助挖掘控制系统的应用之路,尤其是在一些大型施工项目上,该系统的应用案例更是层出不穷。辅助挖掘控制系统这一技术的应用将彻底改变传统的施工技术,提供一种效率更好、工程质量更高的全新工程施工方案。
2 辅助挖掘控制技术的定义及分类
2.1 定义
辅助挖掘控制系统是集合传感技术、定位技术、电液控制技术、数字化施工技术等现代控制技术于一体的新型控制系统。该系统通过传感器实时监测挖掘机的位置姿态,并通过仪表上显示的铲斗齿尖位置与施工目标位置对比(见图1),来达到引导挖掘的目的。

图1 辅助挖掘系统示意图
2.2 分类及功能介绍
随着电液技术的发展,辅助挖掘控制系统正沿着从最初的引导式挖掘,到半自动辅助挖掘,再到全自动辅助挖掘这样一条进化路径快速发展。
辅助挖掘控制系统根据其系统特点可以按照自动化程度及施工维度进行划分。
按自动化程度可以分为:电子标线引导式、半自动挖掘机式、全自动挖掘式3种。
(1)电子标线引导式系统。简单可靠,成本较低,在一些小型工程上较受欢迎。操作机手需要手动操作挖掘机的工作装置,安装在驾驶室的监控仪表实时的显示挖掘机的斗齿位置和实际目标工作位置,通过目标位置和实际的斗齿位置的对比来达到引导挖掘,从而达到辅助挖掘的目的。
(2)半自动以及全自动辅助挖掘控制。系统需要对电液控制系统做出许多适应性改进,通常要加装多个工作装置的先导传感器及控制电磁阀,从而达到自动控制挖掘机动臂、斗杆、铲斗等工作装置的目的,故系统组成复杂、成本较高,且控制策略及控制算法开发难度大。目前半自动辅助挖掘控制技术已被美国天宝成功开发,德国MOBA的半自动辅助挖掘也即将面世。全自动辅助挖掘控制系统尚处于开发研究阶段。半自动挖掘机相比全自动挖掘不需要同步控制动臂、斗杆及铲斗等工作装置进行复合动作,需要人工干预斗杆(或者其他工作装置)动作,故系统较全自动辅助挖掘系统相对简化许多,这一系统现已处于应用阶段。
按施工维度主要分为2D系统和3D系统。电子标线引导式就是典型的2D系统,而半自动辅助挖掘系统和全自动辅助挖掘机系统都属于典型的3D系统
(1)2D辅助挖掘系统分为普通2D系统和进化型2D系统。普通2D系统仅装有一些角度传感器用于测算挖掘机工作姿态,因此需要工程人员对施工地点进行专业的基准定位及工程放样等辅助施工工作,施工较繁琐,但是成本较低,在一些小型施工工程上应用较多。进化型2D系统通过加装激光接收装置或者声纳接收装置和车辆外部的激光仪或者声纳发射基站进行位置信息校准(见图2)。由于声纳是基于相对面的计算,施工面的平整度会随相对面产生变化,因此声纳2D系统更适合道路路面的施工;激光2D系统是通过安装在车辆外的激光发送装置和车辆上面的激光接收器来实现车辆位置计算,激光定位是绝对平面定位,故更适合修坡和沟渠施工。

图2 2D激光辅助挖掘机系统
(2)23D辅助挖掘控制系统在2D系统的基础上进化而来。3D系统根据定位源分为卫星定位系统及激光(或者可见光束)定位系统,卫星定位系统(见图3)适合用在较开阔的施工区域,要求该区域定位卫星信号强度能满足定位要求。此系统根据挖掘机上卫星信号GNSS接收器和外部基站上的GNSS卫星接收器接受卫星定位信息,从而获取位置信息。同时系统通过加装在挖掘机上车两个不同位置的多个卫星定位器利用RTK(Realtime kinematic)实时动态载波相位技术实现差分位置计算,可实时计算出车辆在施工区域的位置坐标。系统结合挖掘机的位置姿态,根据预先导入系统的工程图,可以实时动态的确定施工目标位置,从而达到高效的施工目的。
3 徐工在该技术领域的研究
徐工通过和美国天宝以及大连摩巴(德国MOBA独资子公司)进行了多轮技术研究,目前在3D辅助控制技术上已进行合作开发。通过以徐工硬件平台为基础,以天宝与摩巴软件技术为依托,新型的辅助挖掘控制系统在开发成本上有了大幅度的降低。新开发的系统将控制程序移植到了徐工自主的控制器中,显示界面也融合到了徐工自主的电子监控器中。通过系统融合化开发,减少了多余的硬件成本,提升了产品的竞争力,对于推广辅助挖掘控制系统进一步市场化提供了技术支撑。
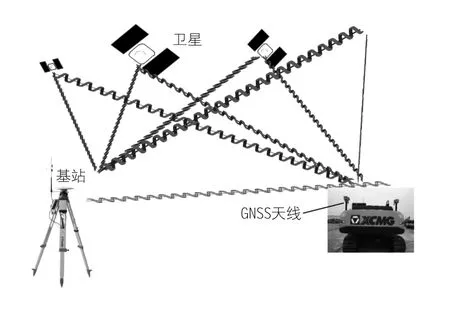
图3 3D辅助挖掘卫星定位系统

图4 徐工新型辅助挖掘机控制系统
目前徐工已经开始在3D辅助挖掘系统的基础上进行深入研究,积极开发半自动3D辅助挖掘控制系统。该系统通过融入电液控制,可以实现大臂和铲斗的自动挖掘,操作手只要拉动斗杆,系统可以根据预先设定的运动轨迹要求自动调整大臂和铲斗的动作,进一步简化了辅助挖掘控制系统的操作。
4 辅助挖掘控制技术的发展展望
在当今这个竞争激烈的施工领域,辅助挖掘控制系统可以提供一种更智能化、更快捷的创新施工方案,将帮助工程承包者以最快的速度,最高的工程产品质量完成施工作业,液压挖掘机搭载此系统后将达到事半功倍的施工效果。但是由于目前能够掌握辅助挖掘控制核心技术的厂家很少,因此系统价格较高,目前在国内市场上还不能被大范围推广。
现阶段辅助挖掘机系统主要依靠在后端市场进行改装,主机厂商由于市场尚不成熟且系统成本较高均未提供此系统的配置。要实现辅助挖掘控制系统的广泛应用,必须突破技术及成本的束缚。徐工作为国内领先的挖掘机制造商已率先寻求于美国天宝、德国MOBA等业界领先的厂家进行了技术合作,通过技术引进及二次开发实现对产品技术的转化。新合作开发的辅助挖掘系统由于节省了额外的控制器和显示器,因而实现了对系统成本的优化,这一举措将对大力推广辅助挖掘系统提供有力的支持。
目前3D辅助挖掘系统的半自动系统已成功开发和应用,全自动的3D辅助挖掘控制系统也在紧锣密鼓的研究当中,相信不久的将来随着国内外各大主机厂及配套厂的介入辅助挖掘机系统将会得到较快的发展。这一技术的开发将大大提升挖掘机的智能化程度,另外通过融合大数据管理该系统将会对实现机群智控施工管理提供更好的保证。
