基于数据融合的航空发动机排气温度测量
2018-05-28雷伟
雷 伟
(厦门航空有限公司飞机维修工程部,福建 厦门 361006)
航空发动机排气温度(EGT,exhaust gas temperature)作为发动机工作状态的重要参数,不论在地面试车还是空中飞行过程中,都要求必须能够精确测量并予以显示[1]。某型国产飞机利用并联方式将多支热电偶均匀分布在发动机涡轮后排气口周围,采取均值算法得到同一截面某一范围内的温度测量值。该方法虽然能够有效降低温度场分布不均对测量结果所带来的影响[2],但仍会导致以下几个问题:①当某一个或几个热电偶发生故障时,其测量数据将带有较大的噪声污染,如果仍采用平均值算法,势必造成计算结果不精确;②未考虑失效数据对测量结果的影响,无法将故障传感器剔除;③无法从数值上定位故障热电偶。
为此,提出将每支热电偶当作独立的传感器使用,分别测量排气温度,将测量后的数据通过合理的算法加以融合,最后得到比单一传感器更可信的测量结果。即使当某个或多个传感器失效时,算法仍然可利用其他有效传感器的数据获取较准确的测量值。
按照融合结构体的定义,融合方式有集中式融合、分布式融合及混合式融合。研究采用集中式融合[3-5],即传感器数据经预处理后送至融合中心进行关联或进行相关运算后得到最终测量结果。
1 发动机EGT测量方法的改进
1.1 原测量方法
某型飞机以双发涡扇发动机作为航空动力源,以左发为例,其排气温度T4的测量是利用环形排列在发动机尾喷口的12支热电偶经并联和温度补偿转换后,将采集到的数据送入发动机数据采集处理器进行计算处理,如图1所示。
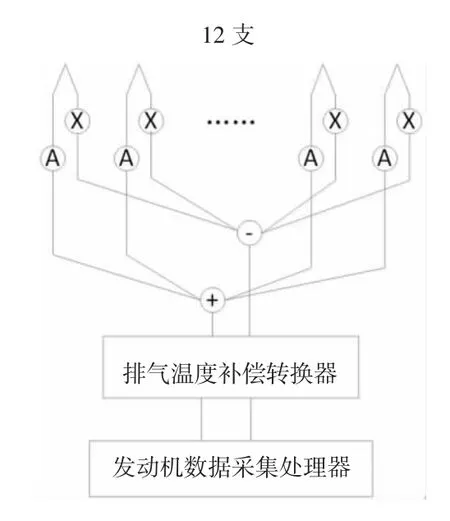
图1 并联测量法Fig.1 Parallel measurement method
热电偶并联测量输出为

其中:Ui为第i个位感器的测量值为n个传感器测量值的均值。
从图1和式(1)可看出,这些热电偶采取并联式排布,在没有考虑传感器本身的测量噪声误差情况下,其总测量输出等于各热电偶热电势的平均值[6]。当某一传感器出现故障时,如果仍应用均值法求解,则精度必然有所降低,甚至输出错误结果,更为严重的是无法确定是哪个传感器出现了故障,即使发现测量数值有异样也无法及时对故障部件做出处理。
1.2 改进的测量方法
针对并联测量法所表现出来的问题,将并联测量改为独立分布式测量,如图2所示。
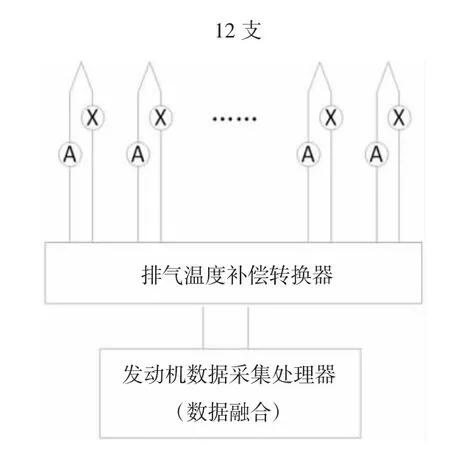
图2 分布式测量法Fig.2 Distributed measurement method
各传感器分别进行测量,再经温度补偿后送入发动机数据采集处理器进行预处理和数据融合后输出。这样,即使某个或多个传感器故障使得数据信息不完整或出现错误值,通过融合算法加以补偿后,就能得到相对于均值算法更为全面和准确的结果。
2 多传感器数据融合算法
2.1 算法的提出
多传感器数据融合是在分析复杂问题,特别是数值问题时,所表现出来的一种过程模拟,其所采用的算法是利用相同类型的多个传感器针对同一被测物理量的多次采样所进行的数值估计[7-8]。与单独传感器测量相比,可减少因测量误差累积所带来的估计误差,其融合过程结构如图3所示。
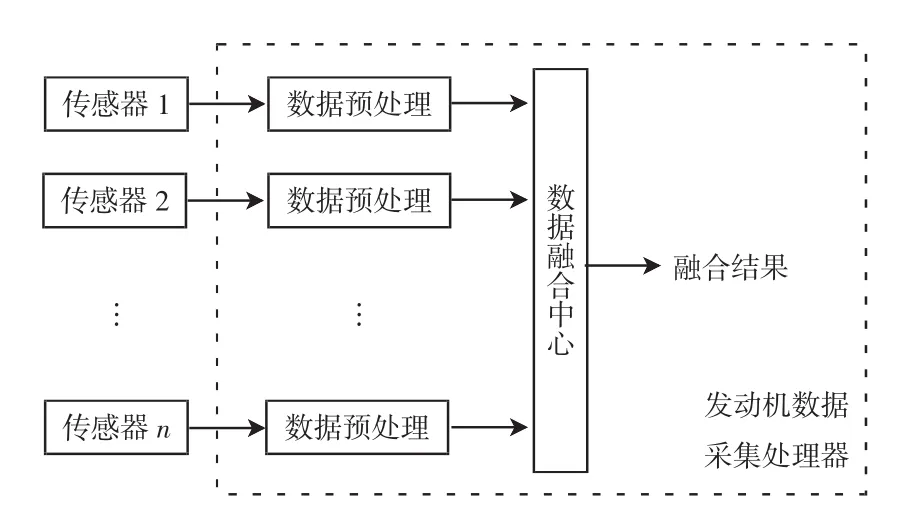
图3 数据融合过程结构图Fig.3 Data fusion structure diagram
将各传感器采集的数据经小波变换降噪预处理,送入数据融合中心做进一步的处理,然后输出最终结果。同时比较了几种常见的多传感器融合算法,包括:一致性融合算法、遗忘记忆融合算法、主成分分析法、自适应加权融合算法[9-10]等。
2.2 一致性融合算法
设共有n个传感器,X(k)为第k时刻待测量的真实值,vi(k)、zi(k)分别为第i个传感器第k时刻测量的噪声值和测量值,i=1,2,…,n。
定义k时刻传感器间的支持度矩阵为
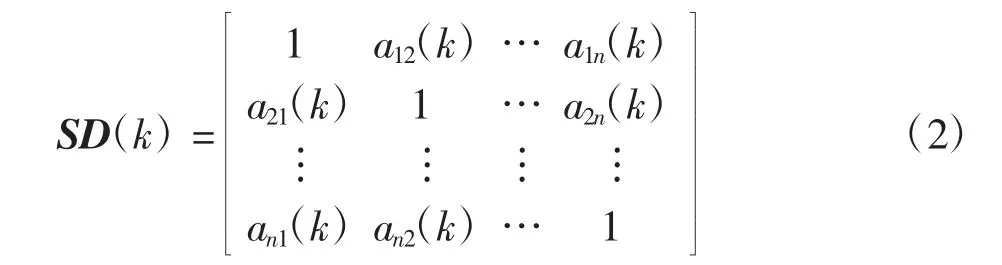
其中,aij(k)为传感器i和j的支持度系数,即

其中:α可调,如果k时刻第i个传感器计算得到的大,则表示其与大多数传感器的测量值保持一致。
定义一致性度量[11]为

则k时刻第i个传感器测量一致性均值为

一致性方差为
在实际融合中,应取一致性均值大,且一致性方差小的传感器测量信息。因此,第i个传感器的加权系数qi(k)应与正相关,而与负相关。取线性加权函数为

其中,b为可调参数,调节此参数可改变对权值系数的影响程度,保证了qi(k)的非负性。
最终得到真实值的估计,即一致性加权融合估计为
2.3 遗忘记忆融合算法
在应用多传感器测量数据时,不同时刻测量值所对应的权值系数是观测时间t的函数,称为遗忘函数A(t),任何单调非减函数均可作为遗忘函数[12]。
在上述一致性融合算法中引入遗忘函数项,得到遗忘记忆融合算法为
其中为第i个传感器在k时刻的融合权值。
定义m为记忆尺度参数,则
2.4 主成分分析算法
主成分分析法采用的是把高维信息投影到低维子空间,并保留主要过程信息的方法[12]。设n个传感器的测量集组合为X=(x1,x2,…,xn),计算其协方差矩阵R,根据R计算第i个传感器的特征值li与特征向量ei,且其中,eij表示向量ei的第j个分量。
定义第i个主成分的贡献率为

累计贡献率为
其中,主成分个数的确定,一般取累计贡献率达到85%以上的特征值所对应的主成分。
定义xi与主成分yj的相关函数(也称载荷)为

对于每一给定的xi,使r(xi,yj)最大的yj,即为最相关主成分。
定义支持度系数(即综合支持度)为

则最终传感器融合估计输出[13]为

2.5 自适应加权融合算法
该算法以总方差最小为判断总则,将各传感器的测量值做最小方差无偏估计,自适应计算其相应的加权因子,使融合后的估计值达到最优。
设各传感器的加权因子为Wi,传感器个数为n,各传感器方差si,则融合后的估计值为

总均方误差为

根据多元函数极值理论[14],可计算出s2最小时的加权因子为


其中:Rii为Xi的自协方差;Rij为Xi和Xj的互协方差。
3 数据融合算法在EGT测量中的应用
3.1 实验仿真及分析
以某次地面试车数据为实验样本,选取油门杆位置28°时,稳定状态1 min的EGT值(实际值为432℃)进行测量,采样频率1 s,每支传感器采集60点。由于各种原因传感器输出不可避免地存在高频噪声干扰,因此首先利用小波变换对数据进行降噪处理,使用db3小波作3层分解,并对第1层的近似系数重构,得到预处理输出信号。
分别运用以上5种算法对预处理信号进行融合计算,其中一致性融合和记忆融合算法选取度量参数α=0.75,权值尺度参数b=0.45,记忆尺度参数m=8;通过计算主成分分析法中第7个特征值的累计贡献率已大于85%,故只取7个样本主成分,最终的处理结果如图4所示。
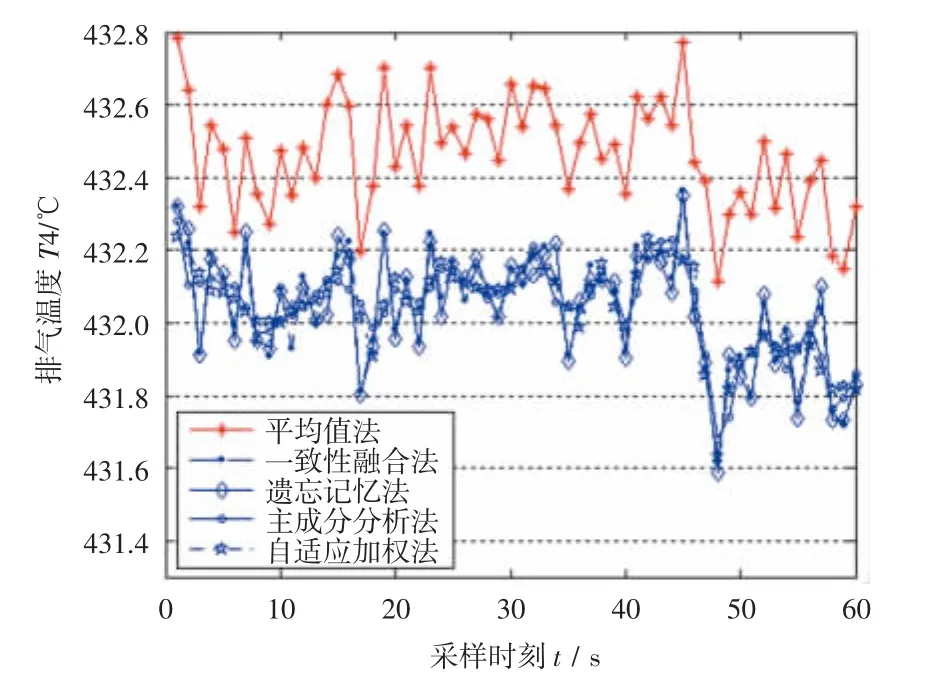
图4 不同算法融合输出结果Fig.4 Outputs of different algorithms
利用方差及其相对误差作为评价指标,5种算法融合后的估计值和指标数据,如表1所示。
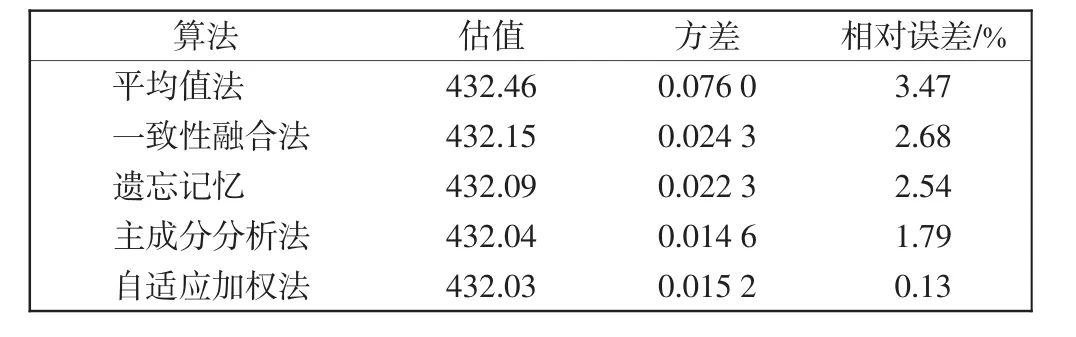
表1 各算法的估计值和指标值Tab.1 Estimated and index value of algorithms
由图4和表1可知,均值算法偏离实际值较大,不能真实反映测量结果,而其他4种融合算法所计算得到的方差均小于均值算法,表明算法的有效性。
由于一致性融合和遗忘记忆融合算法的参数设置需要事先指定,主观因素影响较大,曲线波动较明显;主成分分析法和自适应加权融合算法由于能够自主调整权值大小,曲线波动没有一致性融合和遗忘记忆融合算法明显,且不需要手工指定参数,减少了主观因素的影响[15],其相对误差分别达到了1.79%和0.13%,保证了算法的精确性;同时,主成分法利用较少的新变量就可估计出真值,计算量大大减少。
3.2 传感器故障时的分析
为了能够直观反映算法在故障传感器数据识别方面的能力,以某次发动机试车数据为依据,人为设置6号热电偶短路故障,由于补偿线路电阻的存在,其输出将比真实值大。提取发动机油门杆稳定状态30 s时的5组测量值(真实值为395℃),利用各算法进行融合计算后结果,如表2所示。
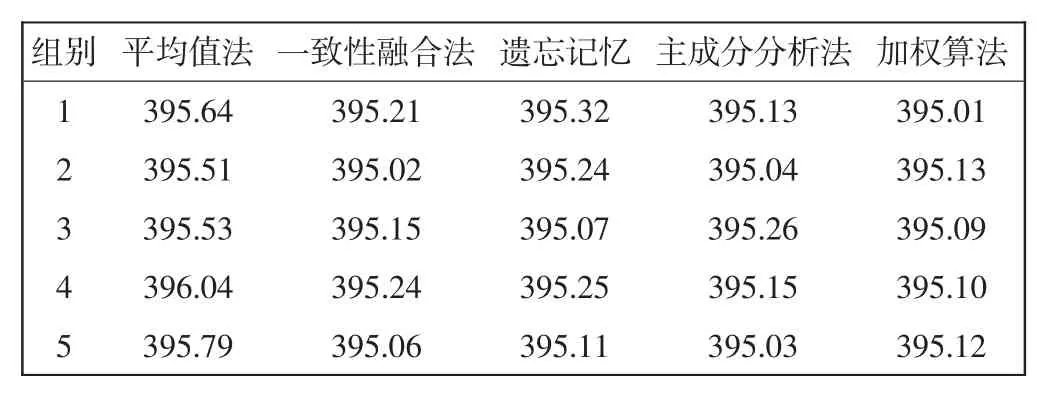
表2 各算法的计算结果Tab.2 Calculating results of algorithms
可见,在6号传感器出现故障的情况下,由于均值算法将错误数据一视同仁,导致其结果较真实值偏大,而其他融合算法则通过一系列处理使错误数据对测量结果的影响降至最低,误差较小。其中经计算后的各传感器权值以及一致性融合法和遗忘记忆法的支持度系数参数,如表3所示。
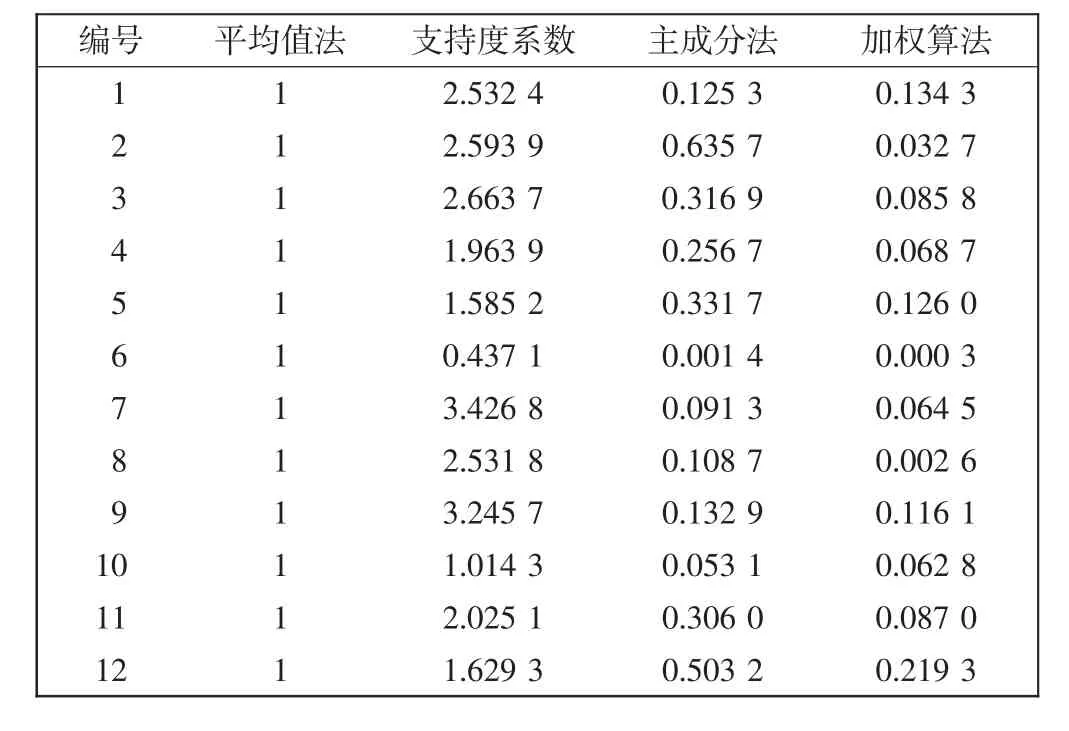
表3 各算法的权值和支持度系数Tab.3 Weights and coefficients of algorithms
从表3中可看出:平均值算法的权值系数始终为1,并没有考虑故障传感器所占的权值比重;支持度法赋予6号传感器的系数为0.437 1,相对于其他正常传感器系数均小,表明其偏离大多数传感器观测值较明显,为不相关数据;主成分法和自适应加权法对应的故障传感器权值分别为0.001 4和0.000 3,非常接近于0,有效识别出故障传感器,这样即使存在失效的传感器,由于其权值系数非常小,不至于对测量结果产生大的影响。
4 结语
对某型飞机发动机排气温度测量方式进行改进,提出利用数据融合算法进行信息处理。对5种不同算法的实验数据对比,结果表明基于数据融合算法相比于传统的并联式数据处理方式的结果更加接近真实值,融合处理结果的可靠性和精确性更高,且4种算法误差均能控制在理想的范围之内。
同时,在人为模拟传感器出现短路故障时,通过对融合系数的判读能很快识别出故障传感器所在位置,且算法可将无效数据对测量结果的影响降到最低,使得估计值不会大范围偏离真实值。后续的研究重点是传感器单通道的故障自诊断能力,另外也可将此类融合算法应用到其他同类问题的处理当中。
参考文献:
[1]任仁良,胡毅克,杨惠敬.737飞机APU排气温度表校验仪的研制[J].中国民航学院学报,1996,14(3):45-49.
[2]吴 虹,季江华.发动机排气温度测量方法分析[J].测控技术,2014,33(S1):146-151.
[3]MEHRANBOD N,SOROUSH M,PANJAPORNPON C.A method of sensor fault detection and identification[J].Journal of Process Control,2005,15(3):321-339.
[4]王 祁.传感器信息处理及应用[M].北京:科学出版社,2012.
[5]薛生虎,李东升,叶子弘,等.基于多传感器融合技术的PCR仪温度校准系统[J].仪器仪表学报,2011,32(6):1232-1237.
[6]刘 晖,陈小惠,刘银峰.基于粗糙集和模糊Kohonen聚类网络的多传感器数据融合[J].电子测量与仪器学报,2010,24(3):218-223.
[7]BARANIUK R G,CEVHER V,DUARTE M F,et al.Model based compressive sensing[J].Information Theory,2010,56(4):1982-2001.
[8]岳元龙,左 信,罗雄麟.提高测量可靠性的多传感器数据融合有偏估计方法[J].自动化学报,2014,40(9):1843-1852.
[9]吕艳新,顾晓辉.多传声器小波多尺度信息融合滤波算法[J].仪器仪表学报,2012,33(4):788-794.
[10]蔡世清,周 杰.基于支持向量机的多传感器数据融合算法[J].计算机工程与设计,2016,37(5):1352-1356.
[11]孙 勇,景 博.基于支持度的多传感器一致性融合[J].传感技术学报,2005,18(3):537-539.
[12]张建业,张 鹏.飞行数据的时间序列分析方法及其应用[M].北京:国防工业出版社,2013.
[13]许桢英,罗来齐,王 匀,等.基于PCA的管道缺陷导波信号特征优化方法[J].电子测量技术,2016,39(4):160-163.
[14]费 文.多传感器自适应加权数据融合在测量排气温度的应用[J].国外电子测量技术,2007,26(12):4-6.
[15]林海军,滕召胜,刘让周,等.基于自适应加权融合的汽车衡故障传感器预估[J].仪器仪表学报,2010,31(7):1509-1513.
